Für den Saugroboter habe ich noch eben eine weitere Funktion programmiert. Wenn man auf den „Staubbehälter leeren“ Button klickt, fährt er automatisch zum Mülleimer in der Küche.
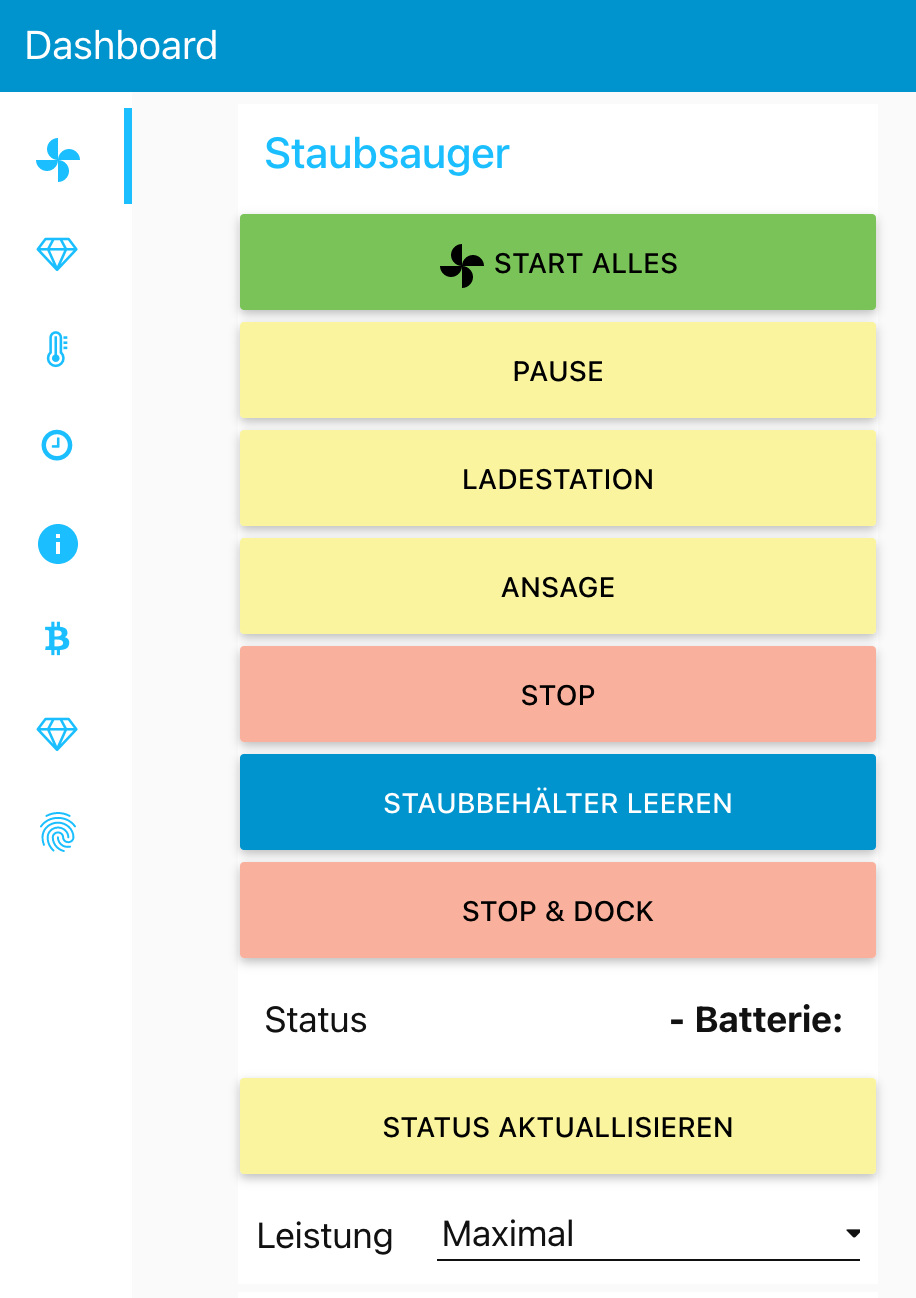
Macht eine Ansage „Hier bin ich“ wenn er da ist, das ist bei mir nach 45 Sekunden der Fall, kann aber auch leicht angepasst werden. Dann habe ich 2 Minuten für das leeren des Staubbehälters vorgesehen. Dann fährt er automatisch mit der Reinigung fort. Hier kann man es sich in einem kurzen Video anschauen:
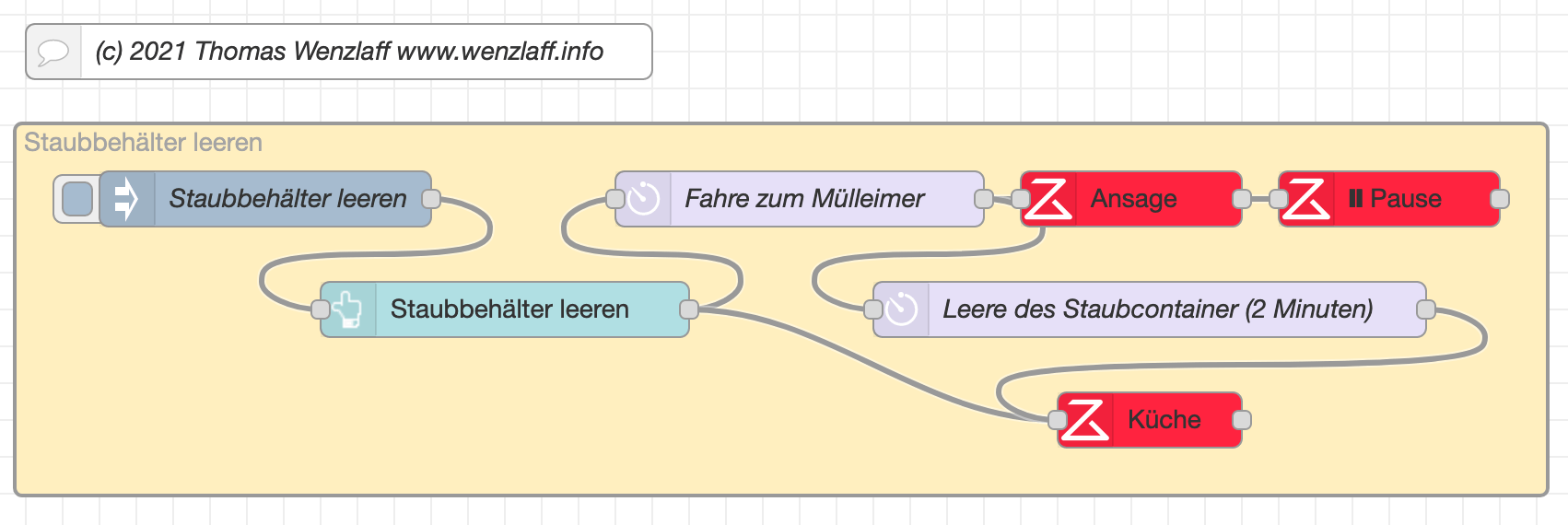
Das ist der dazugehörige NodeRed Flow, der auf einem Raspberry Pi 4 im Docker Kontainer läuft:…
Habe übrigens die Navigation über die Zeit gesteuert, da ich bisher noch keine möglichkeit gefunden habe, die richtigen Koordinaten des Mülleimers zu ermitteln. Das Dock ist ja auf ca. 26000,26000. Tut aber auch so!
Und hier das Programm dazu
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 |
[ { "id": "c0ac9884.bcaff8", "type": "comment", "z": "65d1d0fe.3c4c08", "name": "(c) 2021 Thomas Wenzlaff www.wenzlaff.info", "info": "Verwendeter Node: node-red-contrib-miio-roborock", "x": 1070, "y": 40, "wires": [] }, { "id": "e458d371.6bce4", "type": "group", "z": "65d1d0fe.3c4c08", "name": "Staubbehälter leeren", "style": { "fill": "#ffefbf", "label": true }, "nodes": [ "f1ed66df.7b27a8", "278e3180.dec406", "281515f8.a6829a", "e2f7f3b7.94d638", "b34ed276.ade78", "eda2f1e6.4bbc6", "ed859d7d.7f1538" ], "x": 894, "y": 79, "w": 832, "h": 202 }, { "id": "f1ed66df.7b27a8", "type": "ui_button", "z": "65d1d0fe.3c4c08", "g": "e458d371.6bce4", "name": "", "group": "86b9a6db.87a35", "order": 5, "width": 0, "height": 0, "passthru": true, "label": "Entlehren", "tooltip": "", "color": "", "bgcolor": "", "icon": "", "payload": "16", "payloadType": "num", "topic": "topic", "topicType": "msg", "x": 1140, "y": 120, "wires": [ [ "eda2f1e6.4bbc6", "281515f8.a6829a" ] ] }, { "id": "278e3180.dec406", "type": "inject", "z": "65d1d0fe.3c4c08", "g": "e458d371.6bce4", "name": "Entlehren", "props": [ { "p": "payload" } ], "repeat": "", "crontab": "", "once": false, "onceDelay": 0.1, "topic": "", "payload": "16", "payloadType": "num", "x": 1000, "y": 120, "wires": [ [ "f1ed66df.7b27a8" ] ] }, { "id": "281515f8.a6829a", "type": "miio-roborock-command", "z": "65d1d0fe.3c4c08", "g": "e458d371.6bce4", "name": "Küche", "server": "49f6cbbe.77c9c4", "command_name": "► Start room cleaning", "command": "app_segment_clean", "commandType": "vacuum_cmd", "payload": "payload", "payloadType": "msg", "coordinates": "", "fan_speed": 100, "voice_pack": null, "homekit_stop_to_dock": false, "x": 1510, "y": 240, "wires": [ [] ] }, { "id": "e2f7f3b7.94d638", "type": "miio-roborock-command", "z": "65d1d0fe.3c4c08", "g": "e458d371.6bce4", "name": "", "server": "49f6cbbe.77c9c4", "command_name": "Find me", "command": "find_me", "commandType": "vacuum_cmd", "payload": "payload", "payloadType": "msg", "coordinates": "", "fan_speed": "", "homekit_stop_to_dock": true, "x": 1500, "y": 120, "wires": [ [ "b34ed276.ade78" ] ] }, { "id": "b34ed276.ade78", "type": "miio-roborock-command", "z": "65d1d0fe.3c4c08", "g": "e458d371.6bce4", "name": "", "server": "49f6cbbe.77c9c4", "command_name": "❙❙ Pause", "command": "app_pause", "commandType": "vacuum_cmd", "payload": "payload", "payloadType": "msg", "coordinates": "", "fan_speed": 100, "voice_pack": null, "homekit_stop_to_dock": false, "x": 1640, "y": 120, "wires": [ [] ] }, { "id": "eda2f1e6.4bbc6", "type": "delay", "z": "65d1d0fe.3c4c08", "g": "e458d371.6bce4", "name": "Fahre zum Mülleimer", "pauseType": "delay", "timeout": "46", "timeoutUnits": "seconds", "rate": "1", "nbRateUnits": "1", "rateUnits": "second", "randomFirst": "1", "randomLast": "5", "randomUnits": "seconds", "drop": false, "x": 1320, "y": 120, "wires": [ [ "e2f7f3b7.94d638", "ed859d7d.7f1538" ] ] }, { "id": "ed859d7d.7f1538", "type": "delay", "z": "65d1d0fe.3c4c08", "g": "e458d371.6bce4", "name": "Leere den Staubcontainer (2 Minuten)", "pauseType": "delay", "timeout": "2", "timeoutUnits": "minutes", "rate": "1", "nbRateUnits": "1", "rateUnits": "second", "randomFirst": "1", "randomLast": "5", "randomUnits": "seconds", "drop": false, "x": 1510, "y": 180, "wires": [ [ "281515f8.a6829a" ] ] }, { "id": "86b9a6db.87a35", "type": "ui_group", "name": "Staubsauger", "tab": "10f74434.26e3bc", "order": 1, "disp": true, "width": "6", "collapse": false }, { "id": "49f6cbbe.77c9c4", "type": "miio-roborock-server", "name": "Roborock S6", "ip": "IP-HIER-EINTRAGEN", "token": "TOKEN-HIER-EINTRAGEN", "polling": "10" }, { "id": "10f74434.26e3bc", "type": "ui_tab", "name": "Staubsauger", "icon": "toys", "order": 1, "disabled": false, "hidden": false } ] |