Mit dem neuen Kali 2.0 auf dem Raspberry Pi ist auch eine neue Einrichtung von Kismet nötig, damit die GPS-Daten dort angezeigt werden. Läuft so aber auch auf Debian.
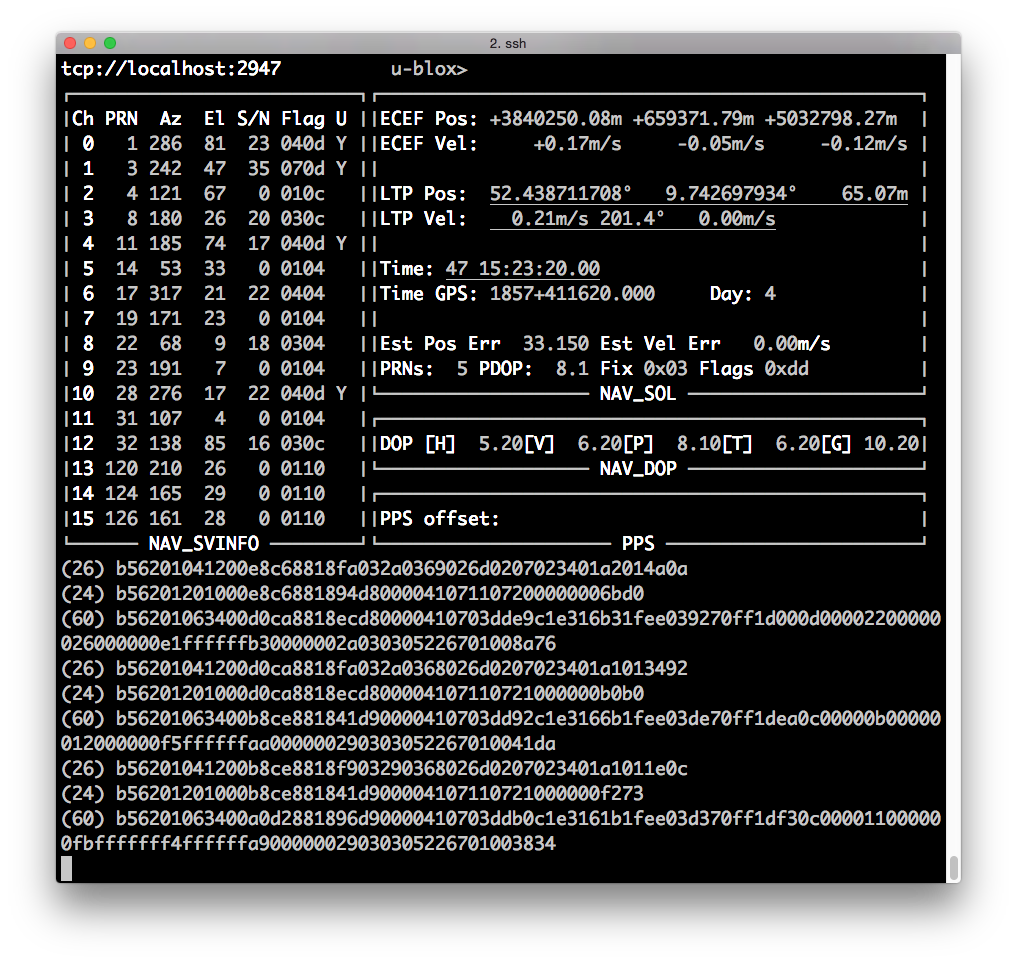
Wie hier schon mal beschrieben, werden die GPS-Daten über den GY-GPS6MV2 an den Raspberry Pi über die serielle Schnittstelle gesendet. Dort holt der gpsd die Daten ab, und stellt sie an localhost:2947 bereit.
Deshalb müssen die folgenden Einstellungen in der /etc/kismet/kismet.conf Datei gemacht werden (Details):
|
1 2 3 4 5 6 |
#nano /etc/kismet/kismet.conf gps=true gpstype=gpsd gpshost=localhost:2947 gpsmodelock=false gpsreconnect=true |
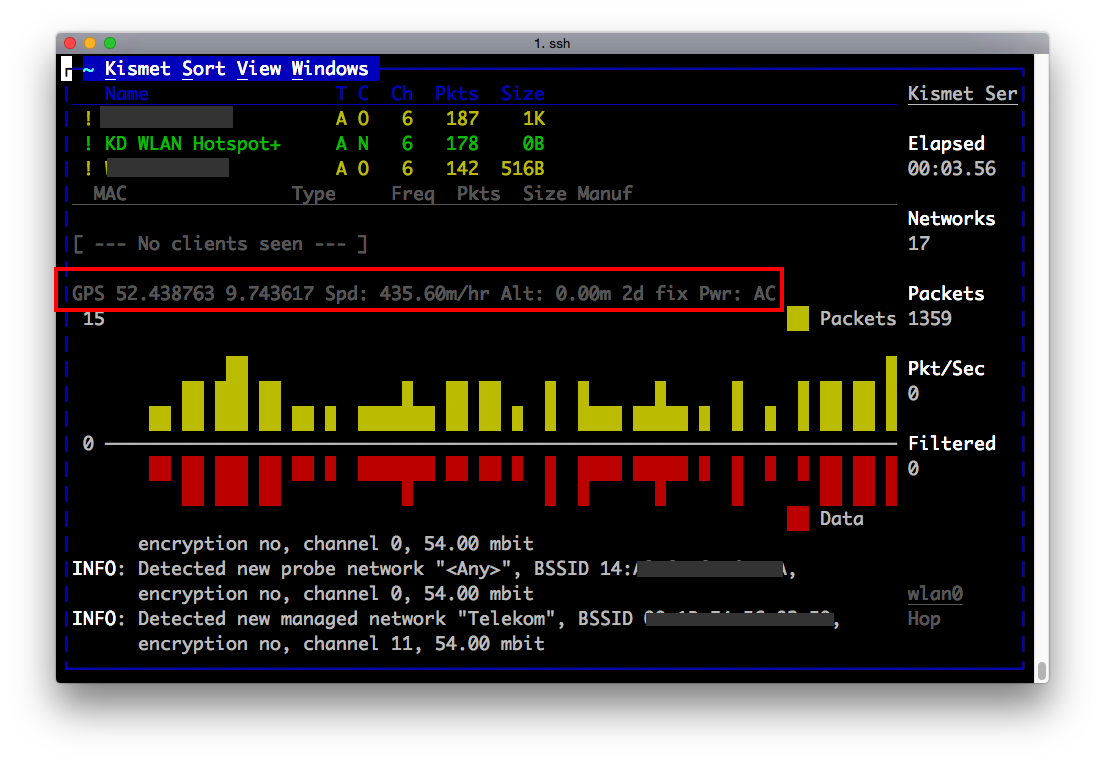
In Kismet werden die GPS-Daten hier angezeigt:
 „Raspberry Pi: Wie muss Kismet konfiguriert werden, damit GPS-Daten angezeigt werden?“ weiterlesen
„Raspberry Pi: Wie muss Kismet konfiguriert werden, damit GPS-Daten angezeigt werden?“ weiterlesen