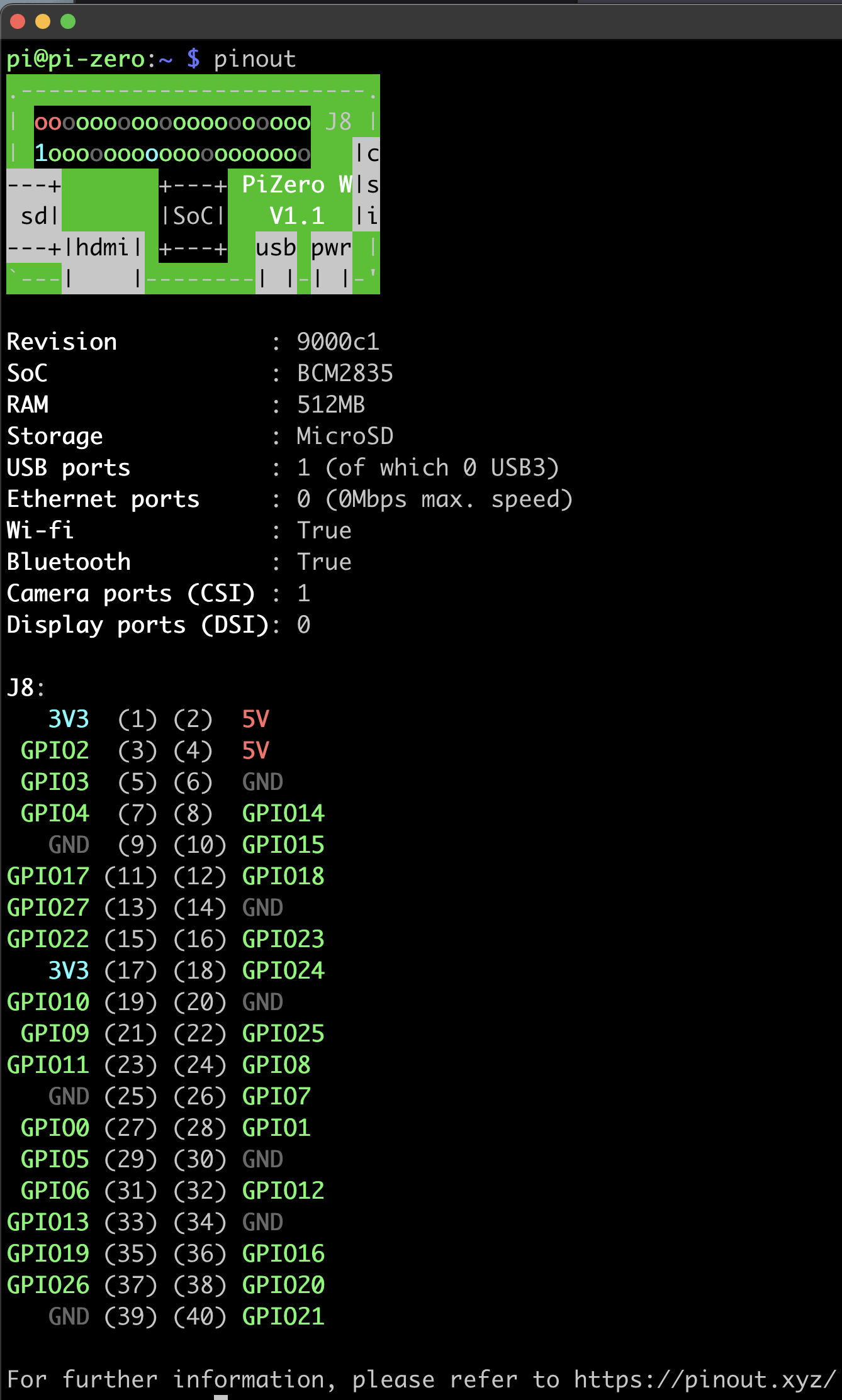
Ein einfaches pinout gibt auf dem Pi die Belegung aus. Cool! Hier die Ausgabe eines Raspberry Pi Zero W
Der Raspberry Pi ist ein vielseitiger Einplatinencomputer, der in den letzten Jahren enorm an Popularität gewonnen hat. Eines seiner bemerkenswertesten Merkmale ist die General Purpose Input Output (GPIO) Schnittstelle. GPIO ermöglicht es dem Raspberry Pi, mit der physischen Welt zu interagieren, indem es digitale Signale sendet und empfängt. „pinout – die GPIO-Schnittstelle des Raspberry Pi“ weiterlesen