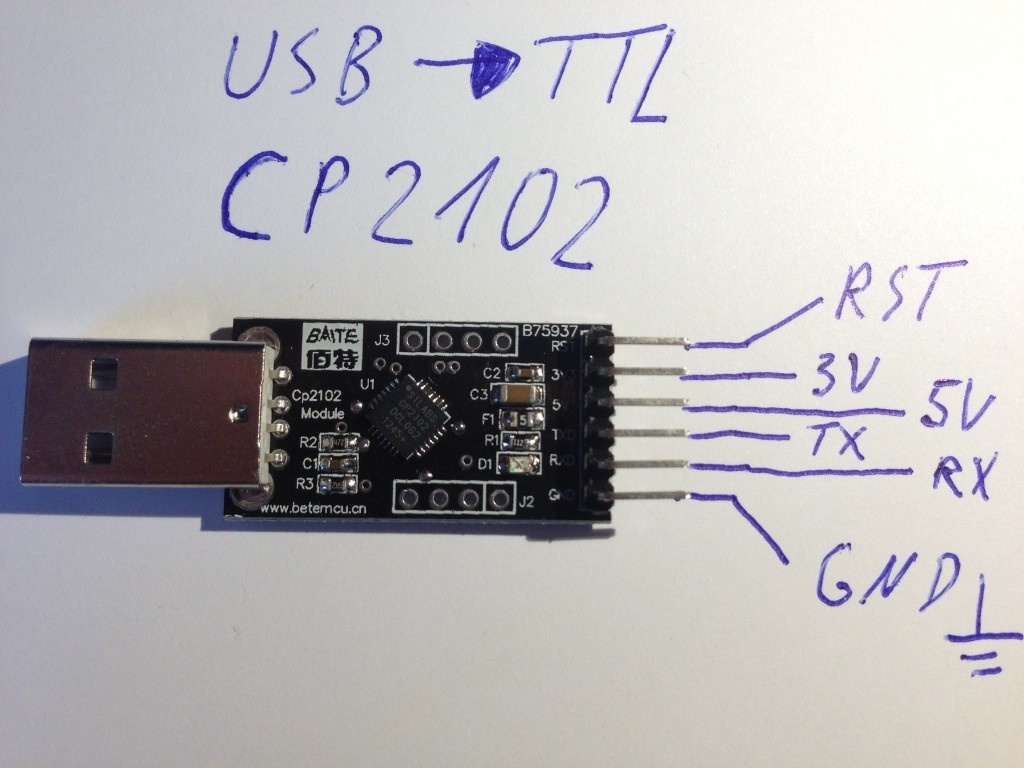
CP 2102 – USB to TTL Konverter eingetroffen!
Wenzlaff.de – Rund um die Programmierung
mit Java, Raspberry Pi, SDR, Linux, Arduino, Sicherheit, Blender, KI, Statistik, Krypto und Blockchain
Mit dem Arduino kann leicht auch 230 Volt geschaltet werden. Dazu kann ein Relais an den digitalen Pin 7 und + VCC und – Masse verbunden werden.
In diesem Video kann man hören und sehen, wie das Relais alle 5 Sekunden an und wieder aus geschaltet wird.
Folgendes Sketch ist in den Arduino Nano hochzuladen.
/*
TWRelais
Dieses Programm schaltet das Relais alle 5 Sekunden an und aus.
Thomas Wenzlaff 02.07.2013
Das Relais wir an den digitalen Pin 7 angeschlossen und VCC 5 V und Masse verbunden
Größe des compilierten Programm: 1108 Byte
*/
// An Pin 7 ist eine Relais angeschlossen,
const int RELAIS = 7;
// Die setup Methode wird nur einmal ausgeführt und bei reset
void setup() {
// Digitaler PIN 7 mit der RELAIS ist ein Ausgang
pinMode(RELAIS, OUTPUT);
}
// Die Endlosschleife
void loop() {
digitalWrite(RELAIS, HIGH); // RELAIS anschalten
delay(5000); // 5s warten
digitalWrite(RELAIS, LOW); // RELAIS ausschalten
delay(5000); // 5 Sekunden warten
}
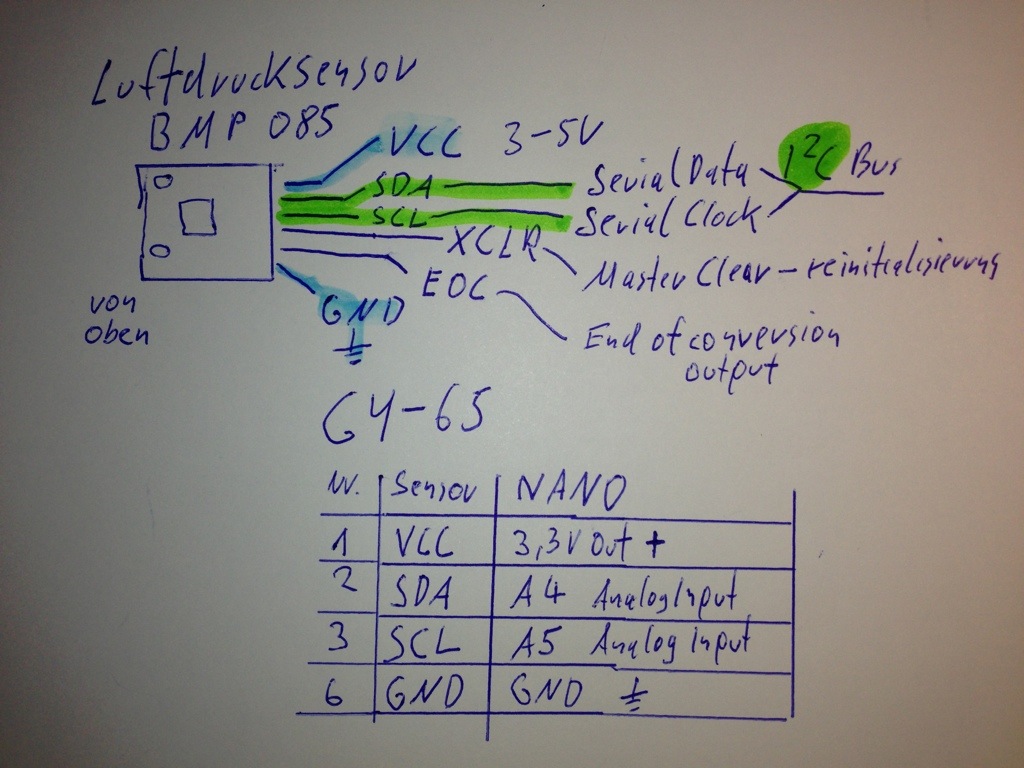
Der BMP085 ist ein Drucksensor mit hoher Präzision und ultra-niedrigem Stromverbrauch für den I2C-Bus.
Technische Daten:
Die Platine mit dem BMP085 (auf GY-65) ist nur 1,5 cm x 2 cm klein.
Von oben:

Von unten:
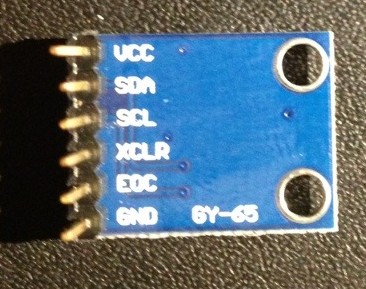
Anschlussbelegung:
Software:
Folgende beiden Libs von Adafruit downloaden und in das Lib Verheichnis kopieren. Evl. noch die Verzeichnisnamen umbenennen, da keine Sonderzeichen vorhanden sein dürfen.
1. Adafruit Unified Basis Sensor Driver
2. Adafruit Unified Drucksensor BMP085 Driver
Diesen Sketch TWDruck hochladen:
#include <Wire.h>
#include <Adafruit_Sensor.h>
#include <Adafruit_BMP085.h>
/*
TWDruck Version 1.0 vom 06.07.2013
Thomas Wenzlaff http://www.wenzlaff.de
Programm Größe: 12296 Bytes
Dies Programm liest den Luftdrucksensor und den Temperatursensor endlos aus,
und gibt die Werte über die Serielle-Schnittstelle mit Leerzeichen getrennt aus.
Kommentare beginnen mit #.
z.B.
# Luftdruck und Temperatur Messprogramm
# TWDruck 1.0 vom 06.07.2013
# http://www.wenzlaff.de
# Sensor: BMP085
# Treiber Version: 1
# Unique ID: 10085
# [Luftdruck in hPa] [Temperatur in Grad Celsius] [Höhe in Meter]
1022.59 26.84 -80.49
1022.73 26.84 -81.69
1022.63 26.85 -80.83
1022.51 26.85 -79.80
...
Anschluss an den Nanu Arduino:
Das BMP085 an:
SCL an A5
SDA an A4
VDD Plus 3.3V DC
Masse Minus
*/
const long MESSINTERVAL = 5000; // Messintervall in milli Sekunden
const long SENSOR_ID = 10085; // eindeutige Sensor ID
String KOMMENTAR = "# "; // Kommentar präfix
String TRENNER = " "; // Trennzeichen der Werte
Adafruit_BMP085 bmp = Adafruit_BMP085(SENSOR_ID);
void anzeigeDetails(void)
{
sensor_t sensor;
bmp.getSensor(&sensor);
Serial.println(KOMMENTAR +"Luftdruck und Temperatur Messprogramm");
Serial.println(KOMMENTAR +"TWDruck 1.0 vom 06.07.2013");
Serial.println(KOMMENTAR +"http://www.wenzlaff.de");
Serial.print (KOMMENTAR + "Sensor: "); Serial.println(sensor.name);
Serial.print (KOMMENTAR + "Treiber Version: "); Serial.println(sensor.version);
Serial.print (KOMMENTAR + "Unique ID: "); Serial.println(sensor.sensor_id);
delay(500);
}
void setup(void)
{
Serial.begin(9600);
if(!bmp.begin())
{
Serial.print(KOMMENTAR + "Kein BMP085 gefunden ... Prüfe I2C Adresse!");
while(1);
}
anzeigeDetails();
}
void loop(void)
{
sensors_event_t event; // neues Sensor ereignis
bmp.getEvent(&event);
if (event.pressure)
{
Serial.print(event.pressure); // Luftdruck in hPa
Serial.print(TRENNER);
/* Calculating altitude with reasonable accuracy requires pressure *
* sea level pressure for your position at the moment the data is *
* converted, as well as the ambient temperature in degress *
* celcius. If you don't have these values, a 'generic' value of *
* 1013.25 hPa can be used (defined as SENSORS_PRESSURE_SEALEVELHPA *
* in sensors.h), but this isn't ideal and will give variable *
* results from one day to the next. *
* *
* You can usually find the current SLP value by looking at weather *
* websites or from environmental information centers near any major *
* airport. *
* *
* For example, for Paris, France you can check the current mean *
* pressure and sea level at: http://bit.ly/16Au8ol */
float temperature;
bmp.getTemperature(&temperature);
Serial.print(temperature); // Temperatur in Grad Celsius
Serial.print(TRENNER);
/* Then convert the atmospheric pressure, SLP and temp to altitude */
/* Update this next line with the current SLP for better results */
float seaLevelPressure = SENSORS_PRESSURE_SEALEVELHPA; // 1013.25F Average sea level pressure is 1013.25 hPa
Serial.print(bmp.pressureToAltitude(seaLevelPressure,
event.pressure,
temperature)); // Höhe in Meter
Serial.println();
}
else
{
Serial.println(KOMMENTAR +"Sensor error");
}
delay(MESSINTERVAL);
}
Mit diesen Daten, wird dieses Diagramm erzeugt: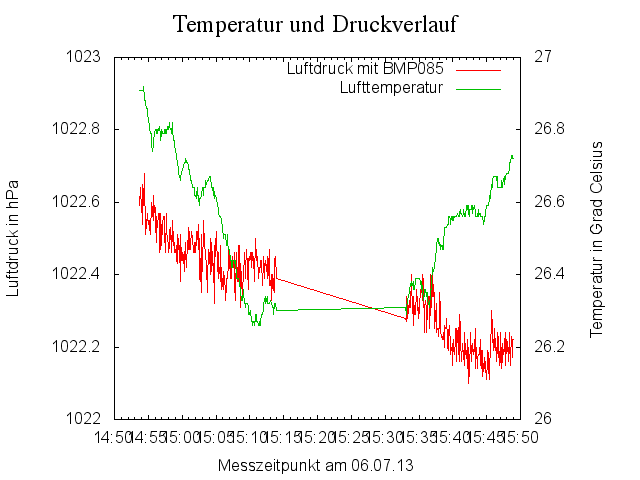
Die gerade Linie im Diagramm, rührt daher das der PC sich automatisch in den Standby-Betrieb schaltet und damit die Serielle-Verbindung nicht mehr abgefragt wird.
Der dritte Wert der Daten ist die Höhe, die ändert sich nicht gross und wird deshalb nicht im Diagramm dargestellt. Wie wird bei gnuplot die 3. Y-Achse erzeugt? Geht das überhaupt?
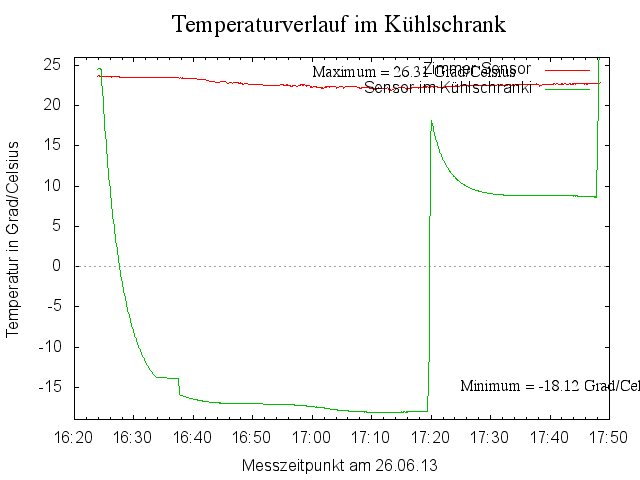
Zuerst wurde der Temperatursensor in das Gefrierfach und dann in den Kühlschrank gelegt (grüne Kurve). Der zweite Sensor, wurde außerhalb des Kühlschranks platziert (die rote Kurve).
Folgende gnuplot Datei ist dafür nötig:
set title "Temperaturverlauf im Kühlschrank" font "Times,18"
set ylabel "Temperatur in Grad/Celsius"
set xlabel "Messzeitpunkt am 26.06.13"
set xdata time # x-Achse wird im Datums/Zeitformat skaliert
set timefmt "%Y.%m.%d_%H:%M:%S" # Format Zeitangaben yyyy.mm.dd_hh:mm:ss
set format x "%H:%M" # Format für die Achsenbeschriftung
set yrange [-19:26] # die y-Achse geht von:bis
set zeroaxis # eine Null Linie
# Maximum und Minimum anzeigen
max_y = GPVAL_DATA_Y_MAX
set label 1 gprintf("Maximum = %g Grad/Celsius", max_y) at "2013.06.26_17:00:00",24 font "Times,12"
min_y = GPVAL_DATA_Y_MIN
set label 2 gprintf("Minimum = %g Grad/Celsius", min_y) at "2013.06.26_17:25:00",-15 font "Times,12"
set terminal png
set output "temperaturverlauf-kuehlschrank.png"plot "temperatur-kuehlschrank.txt" using 1:2 title "Zimmer Sensor" with lines, "" using 1:3 title "Sensor im Kühlschranki" with lines
set terminal aqua
replot
Diese Grafik liegen diese, mit dem Arduino gemessenen Werte zugrunde. Die Aussetzer in der Aufzeichnung rühren daher, das sich der MacBookAir nach einiger Zeit in den Sleep-Modus schaltet, dann kommen keine Daten aus der USB-Schnittstelle an. Da muss man sich dann noch was einfallen lassen.
Folgende gnuplot Befehle sind dazu nötig: „Wie kann mit gnuplot ein Diagramm der Temperaturdiffernz zweier Temperatur Sensoren erstellt werden?“ weiterlesen
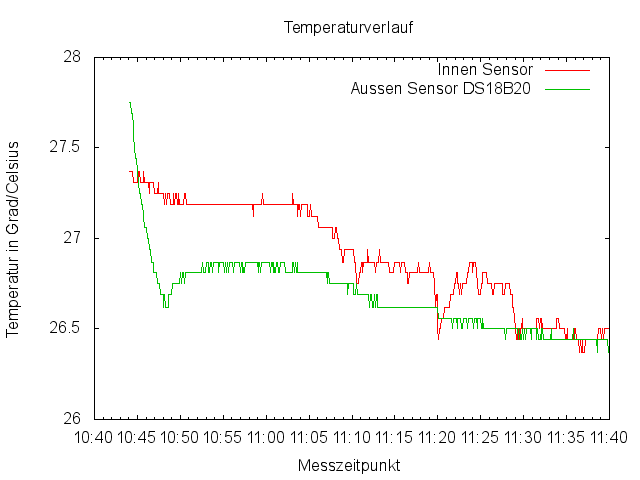
Eine kurze Messung mit zwei an das Arduino-Board angeschlossene Temp.-Sensoren DS18B20 ergibt diese Daten.
Daraus läßt sich mit diesen gnuplot Befehlen
set title "Temperaturverlauf"
set ylabel "Temperatur in Grad/Celsius"
set xlabel "Messzeitpunkt"
set xdata time # x-Achse wird im Datums/Zeitformat skaliert
set timefmt "%Y.%m.%d_%H:%M:%S" # Format Zeitangaben yyyy.mm.dd_hh:mm:ss
set format x "%H:%M" # Format für die Achsenbeschriftung
set yrange [26:28] # die y-Achse geht von:bis
set terminal png
set output "temperaturverlauf.png"
plot "temperatur.log" using 1:2 title "Innen Sensor" with lines, "" using 1:3 title "Aussen Sensor DS18B20" with lines
diese Grafik plotten:
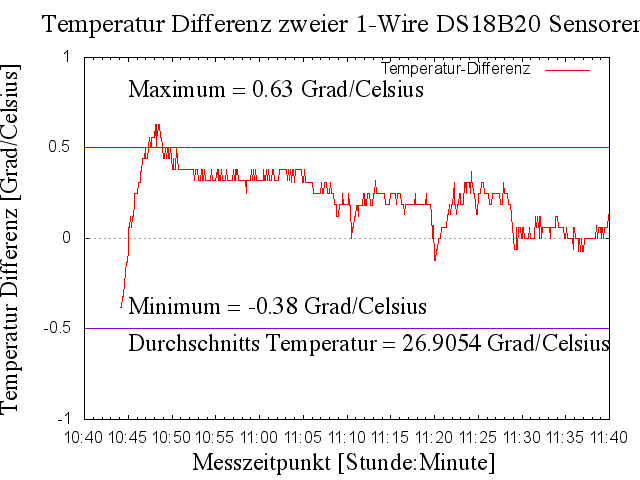
Die Sensoren sind mit +-0,5 Grad Celsius bei -10 bis +85 Grad angegeben.
Die Differenz beider Werte ergibt mit diesen gnuplot Befehlen:
set title "Temperatur Differenz zweier Sensoren"
set ylabel "Temperatur Differenz in Grad/Celsius"
set xlabel "Messzeitpunkt"
set xdata time # x-Achse wird im Datums/Zeitformat skaliert
set timefmt "%Y.%m.%d_%H:%M:%S" # Format Zeitangaben yyyy.mm.dd_hh:mm:ss
set format x "%H:%M" # Format für die Achsenbeschriftung
set yrange [-1:1] # die y-Achse geht von:bis
set zeroaxis # die 0 Linie
set terminal png # erzeugt eine PNG Datei
set output "differenztemperaturverlauf.png" # Name der PNG Datei
plot "temperatur.log" using 1:($2-$3) title "Temperatur-Differenz" with lines
set terminal aqua # wieder auf Terminal
replot # nochmal in Terminal plotten
folgendes Ergebnis.
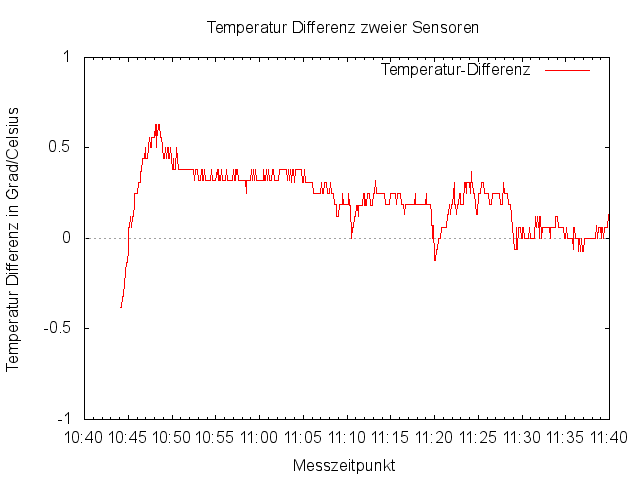
Mit welchem gnuplot Befehl bekomme ich eine horizontale Linie bei 0,5 und -0,5 Grad hin, die mit min und max Beschriftet ist? Ok, hier die Lösung.
Wie kann nun über die Serielle-Schnittstelle per Java auf den Arduino mit dem Mac zugegriffen werden?
Wie in dieser Anleitung beschrieben vorgehen.
1. Auf den Arduino den „Hallo Welt“ Sketch laden.
void setup(){
Serial.begin(9600);
}
void loop(){
Serial.println("Hello world");
delay(1000);
}
2. Den RXTX-Treiber in Version >= 2.2pre2 laden. Die 1.7 Version macht mit Mac OS X 10.8.4 Probleme, es kommt die Meldung, das der Port belegt ist.
3. Die zwei Dateien aus dem entpackten Archiv librxtxSerial.jnilib und RXTXcomm.jar in das /Library/Java/Extensions Verzeichnis kopieren
4. Die RXTXcomm.jar dem Classpath des Projektes hinzufügen.
5. Im Testprogramm den PORT_NAMES „/dev/tty.usbserial-A501U7KD“ entsprechend setzen. Im Arduino-IDO Menü Werkzeuge-Serieller-Port schauen, wie er genau heißt.
6. SerialTest starten. „Hello World“ wird auf den Konsole ausgegeben.
„Per Java über die Serielle-Schnittstelle auf den Arduino zugreifen mit dem Mac OS X 10.8.4“ weiterlesen
Habe heute einen One-Wire DS18B20 Temperatursensor erhalten und ihn mit dem Arduino Nano verbunden. Der Messbereich des Sensors beträgt von -55°C bis +125°C bei ± 0,5°C Genauigkeit.
Mit den OneWire 2.2 und Dallas Temperature Control Library 3.7.2 Bibliotheken ist die
Temperaturmessung schnell zusammengebaut.
Hier das Foto des Aufbaus mit Schaltplan:

Das Programm (8038 byte) gibt zuerst die eindeutige ID des Sensors aus, (28-A2-9D-8A-04-00-00-2B) und dann jede Sekunde den neuen Messwert:
/*
TWTemp Version 1.0 vom 14.06.2013
8038 bytes
Thomas Wenzlaff http://www.wenzlaff.de
Temperature Sensor DS18B20 an Digitalen Port Pin 2 wie folgt verbunden
Links=Masse,
Mitte=Data,
Rechts=+5V,
3300 to 4700 Ohm Widerstand von +5V nach Data.
Es wird erst die Adresse des 1-Wire-Device ausgegeben und dann wird die Temperaturmessung gestartet.
*/
/* Benötigte Bibliotheken importieren */
#include <OneWire.h>
#include <DallasTemperature.h>
#define ONE_WIRE_BUS 2 /* Digitalport Pin 2 definieren */
OneWire ourWire(ONE_WIRE_BUS); /* Ini oneWire instance */
DallasTemperature sensors(&ourWire);/* Dallas Temperature Library für Nutzung der oneWire Library vorbereiten */
void setup()
{
delay(1000);
Serial.begin(9600);
Serial.println("Temperatur Messprogramm");
Serial.println("TWTemp 1.0 vom 14.06.2013");
Serial.println("http://www.wenzlaff.de");
delay(1000);
sensors.begin();/* Inizialisieren der Dallas Temperature library */
adresseAusgeben(); /* Adresse der Devices ausgeben */
Serial.print("Starte Temperatur abfragen ...");
}
void loop()
{
Serial.println();
sensors.requestTemperatures(); // Temp abfragen
Serial.print(sensors.getTempCByIndex(0) );
Serial.print(" Grad Celsius");
}
void adresseAusgeben(void) {
byte i;
byte present = 0;
byte data[12];
byte addr[8];
Serial.print("Suche 1-Wire-Devices...\n\r");// "\n\r" is NewLine
while(ourWire.search(addr)) {
Serial.print("\n\r\n\r1-Wire-Device gefunden mit Adresse:\n\r");
for( i = 0; i < 8; i++) {
Serial.print("0x");
if (addr[i] < 16) {
Serial.print('0');
}
Serial.print(addr[i], HEX);
if (i < 7) {
Serial.print(", ");
}
}
if ( OneWire::crc8( addr, 7) != addr[7]) {
Serial.print("CRC is not valid!\n\r");
return;
}
}
Serial.println();
ourWire.reset_search();
return;
}
Um die höchstmögliche Genauigkeit des Sensors auszulesen ist im Setup noch dieser Befehl nötig, damit dauert die Messung aber etwas länger: „Temperatur Messung mit dem DS18B20 und Arduino Nano“ weiterlesen

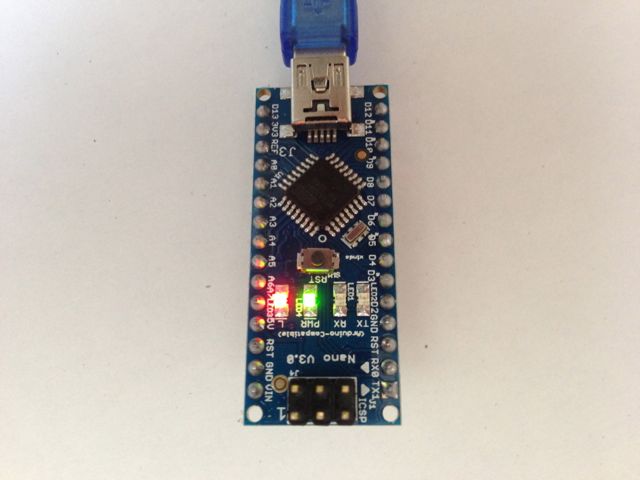
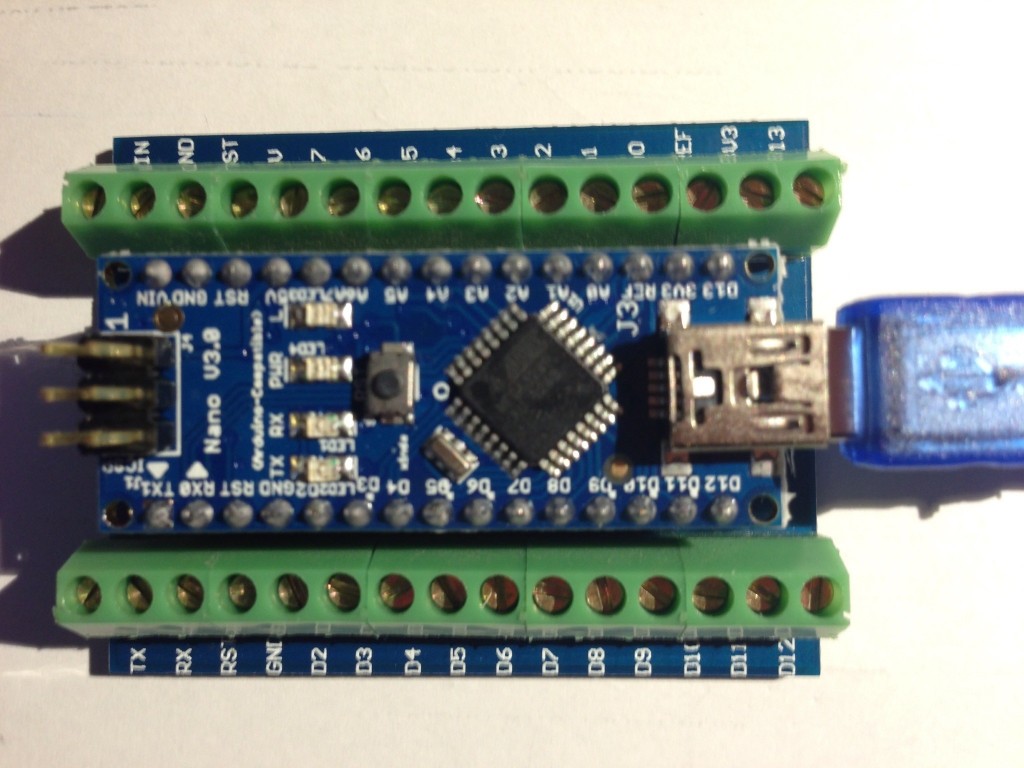
Mit Nano
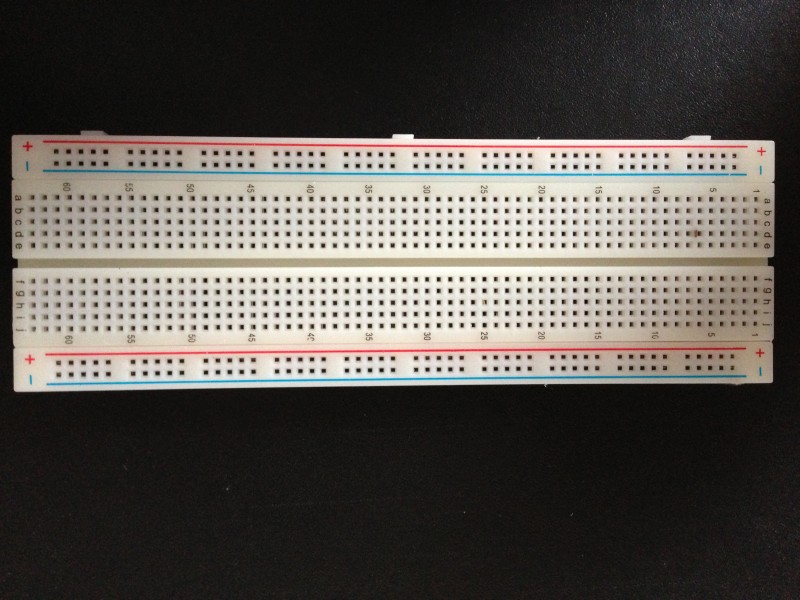
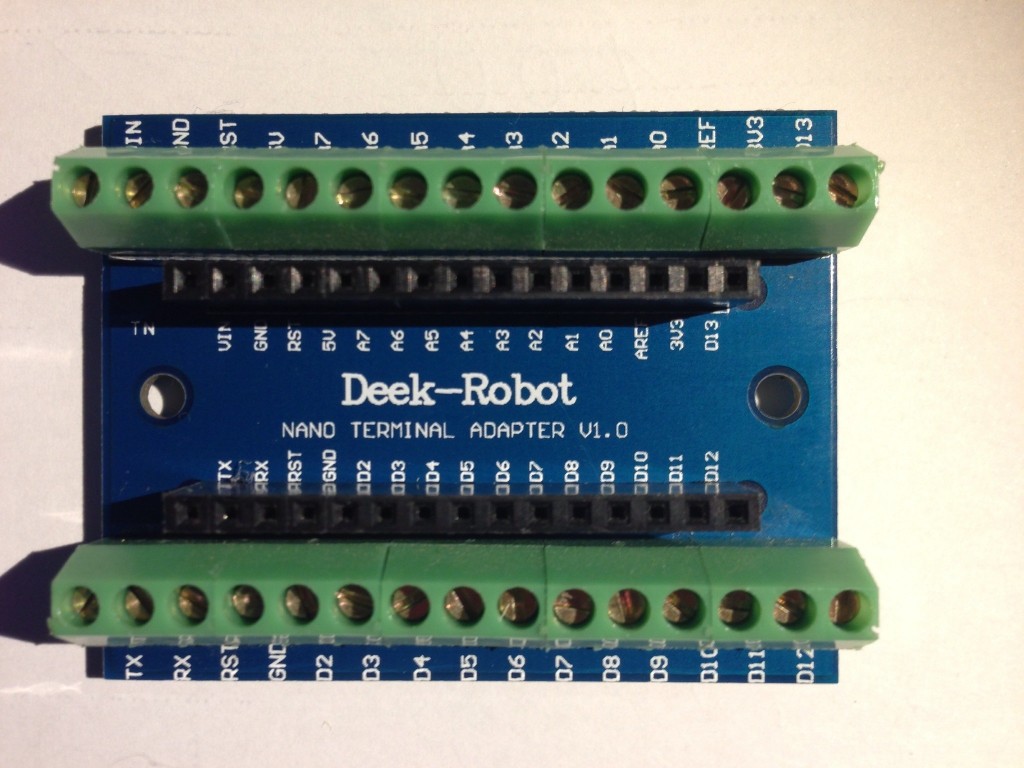
Nur der Adapter
So vorgehen, wie in der Arduino-Anleitung beschrieben.
1. Virtual Com Device Treiber 2.2.18 von FTDICHIP laden und wie in der Anleitung beschrieben installieren.
Für Mac OSX 10.8.3 und 10.8.4 ist es nötig die FTDIUSBSerialDriver_10_4_10_5_10_6_10_7.mpkg zu installieren. Nun muss das Arduino Board an den USB-Port angeschlossen werden. Wird es nicht angeschlossen sind die installierten Treiber nicht im /dev Verzeichnis sichtbar.
Dann im Terminal im Verzeichnis /dev überprüfen ob die *usbserial* Treiber installiert wurden.
2. Entwicklungsumgebung downloaden und installieren. Starten.
3. Seriellen Port unter dem Menü: Tools – Serieller Port – /dev/cu.usbserial-A5001U7KD auswählen.
4. Beispiel auswählen und überprüfen und auf den Arduino uploaden.
Das erste Video des Arduino Nano mit dem initialen Testprogramm „Blinkende LED“ läuft am USB Port des Mac und Windows: