/*
RFIDReader
Beschreibung: Dieses Programm liesst RFID-Tags von Transponer ein und ueberprueft die Checksumme (XOR)
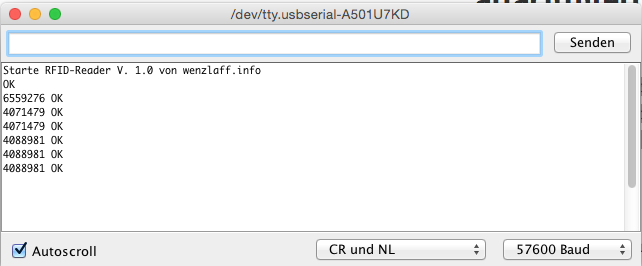
und gibt die Nummer auf der Seriellen-Konsole aus wenn die Nummer erkannt wurde gefolgt von einem OK.
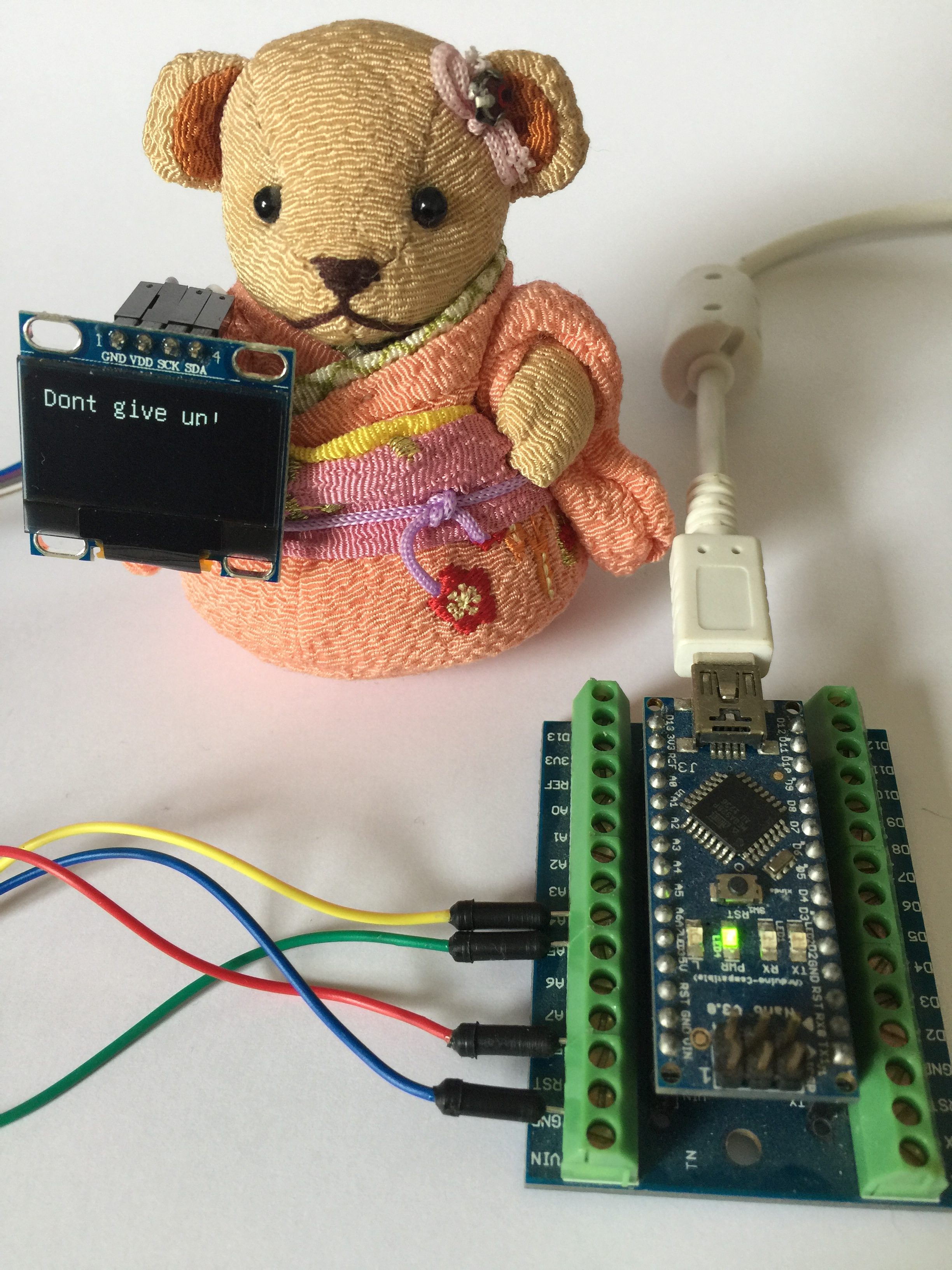
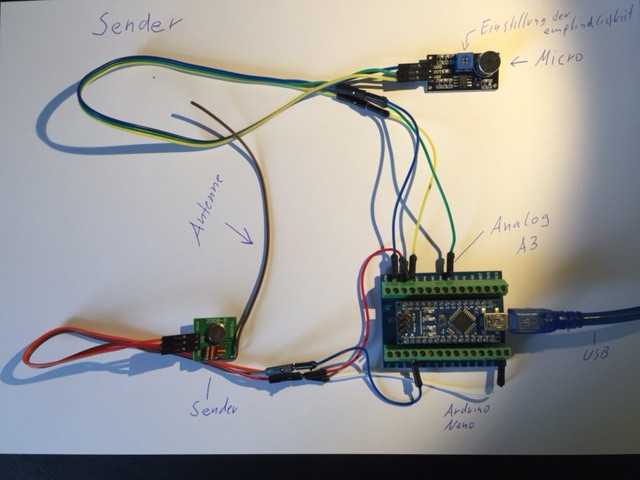
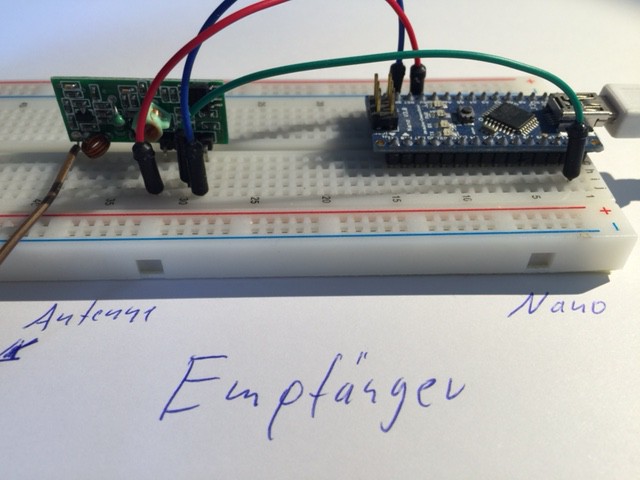
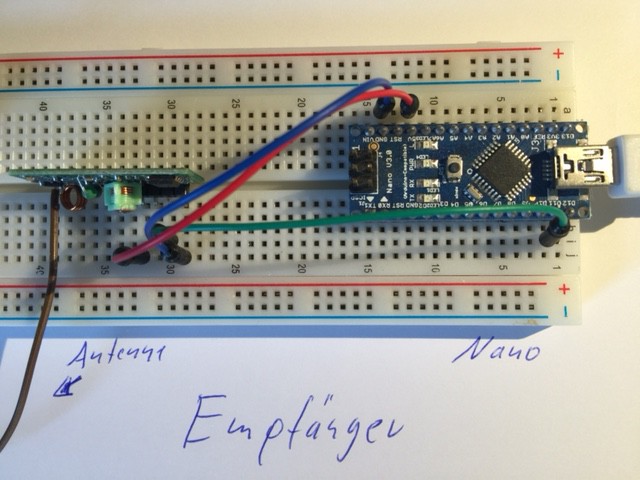
Folgende Verbindungen sind noetig:
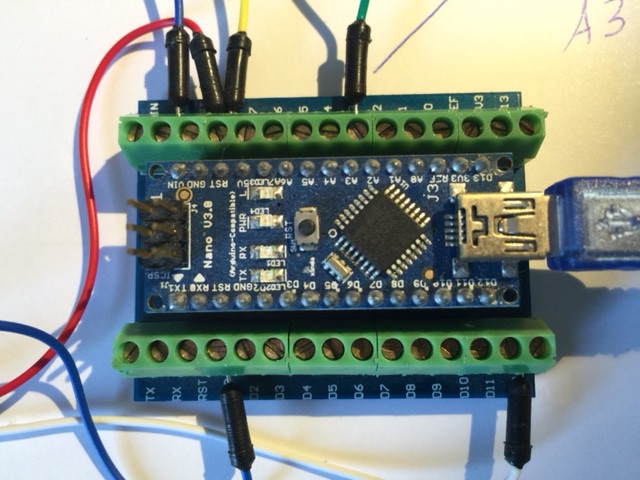
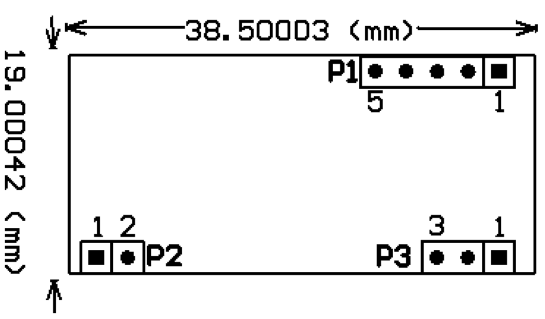
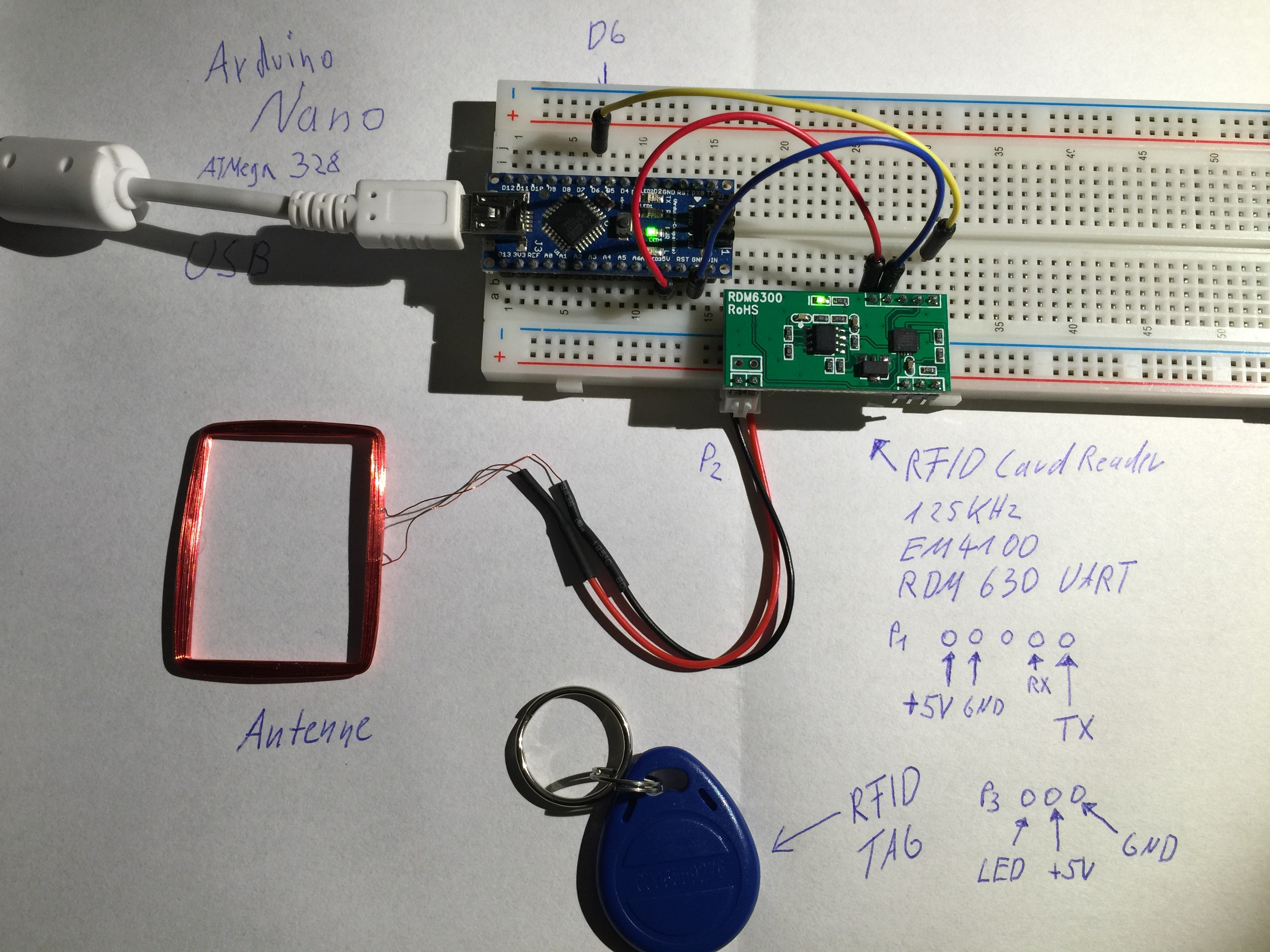
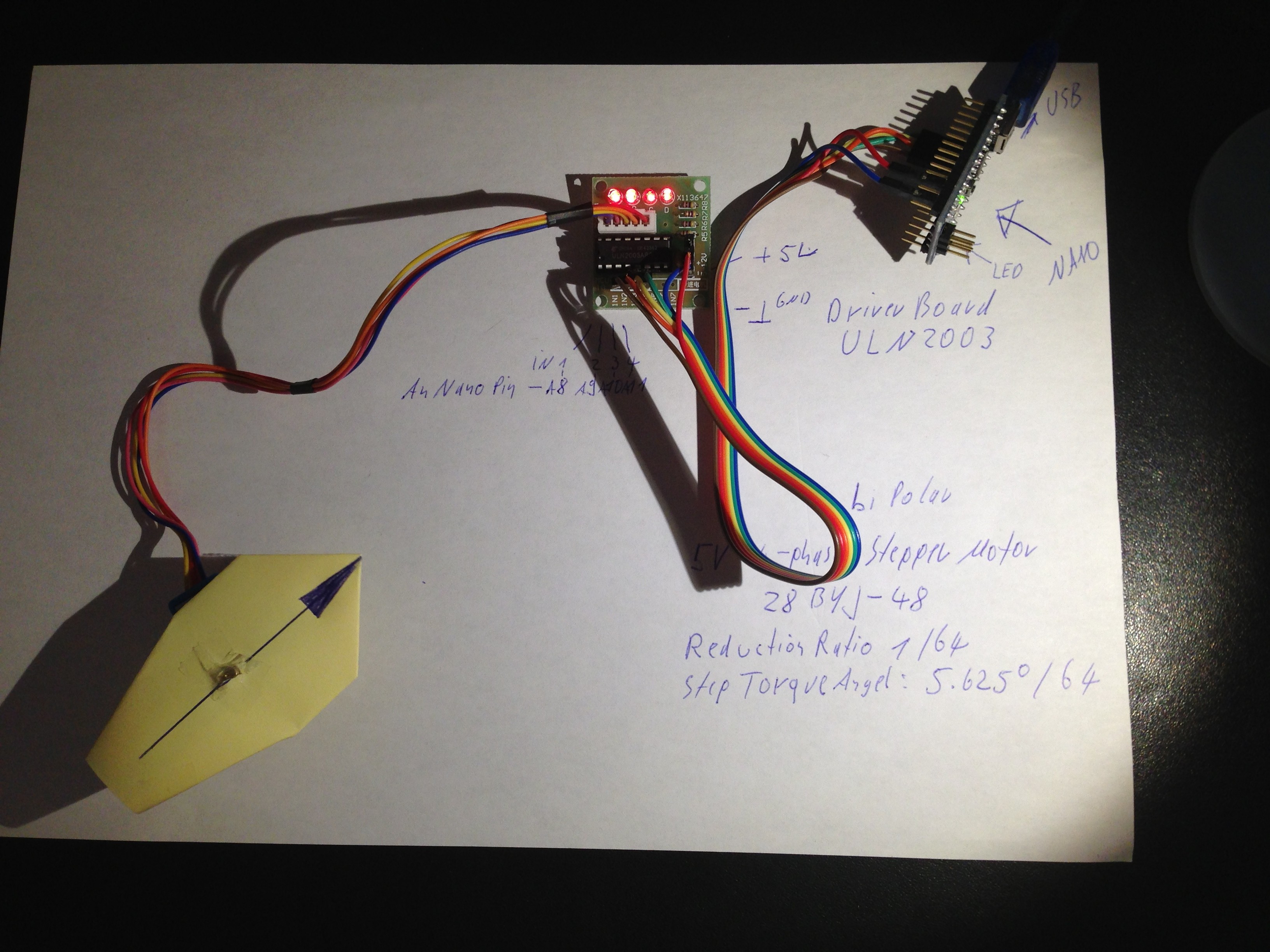
Arduino Nano: D6 auf PIN 1 des RDM630
+5v auf PIN 5 des RDM630 (+5 Volt)
GND auf PIN 4 des RDM630 (GND)
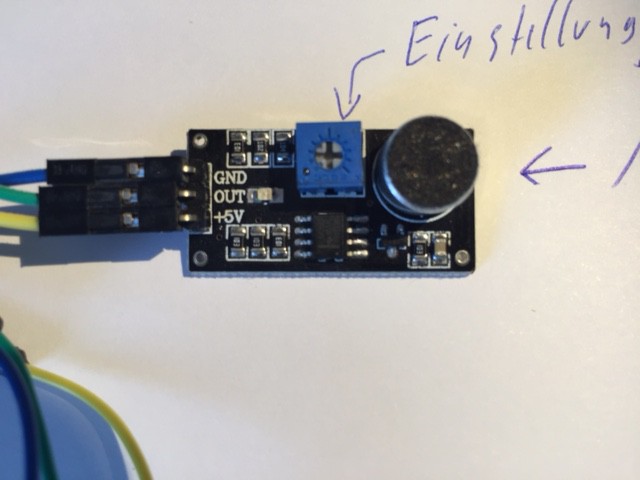
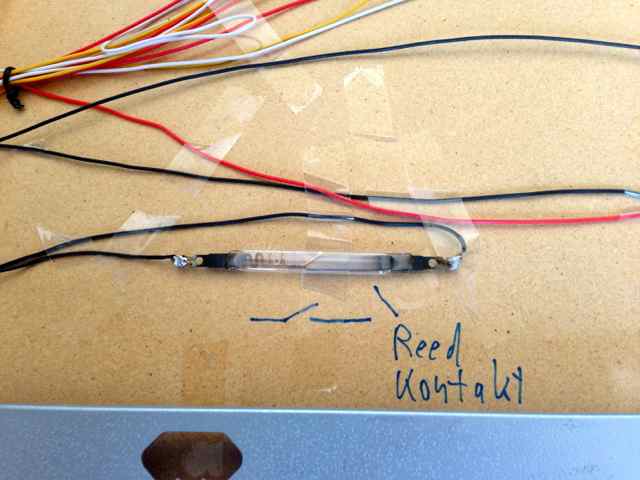
Antenne auf P2 PIN 1 und 2 des RDM630
Serielle Konsole auf 57000 Baud stellen.
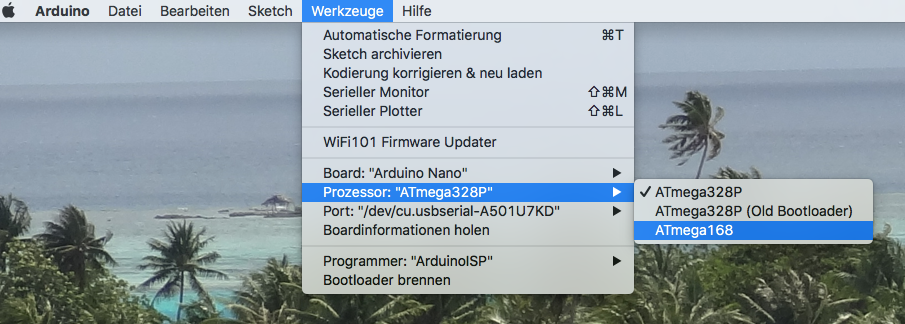
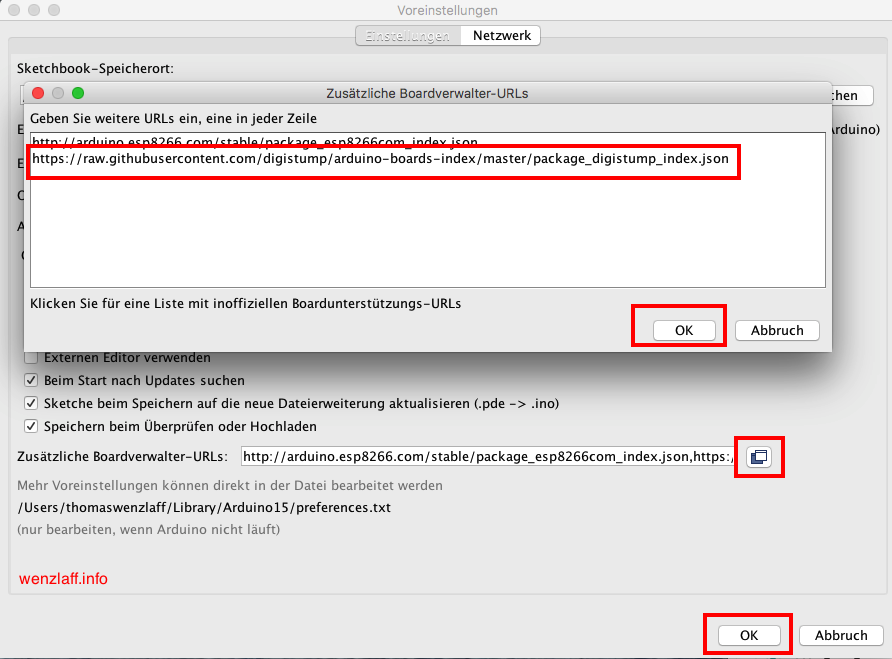
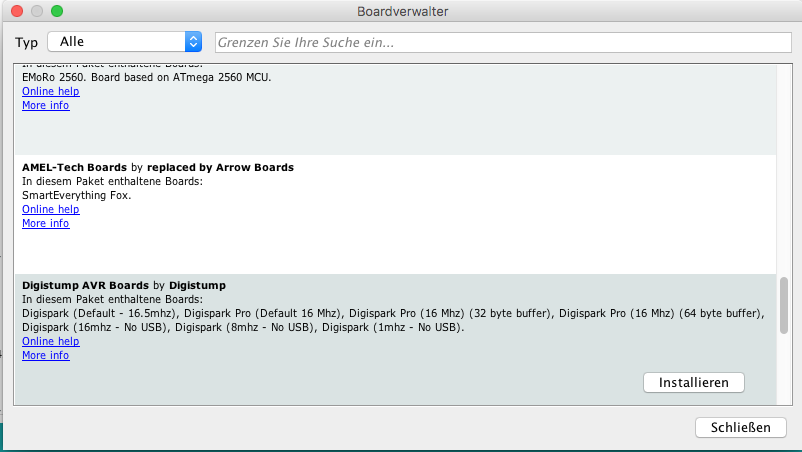
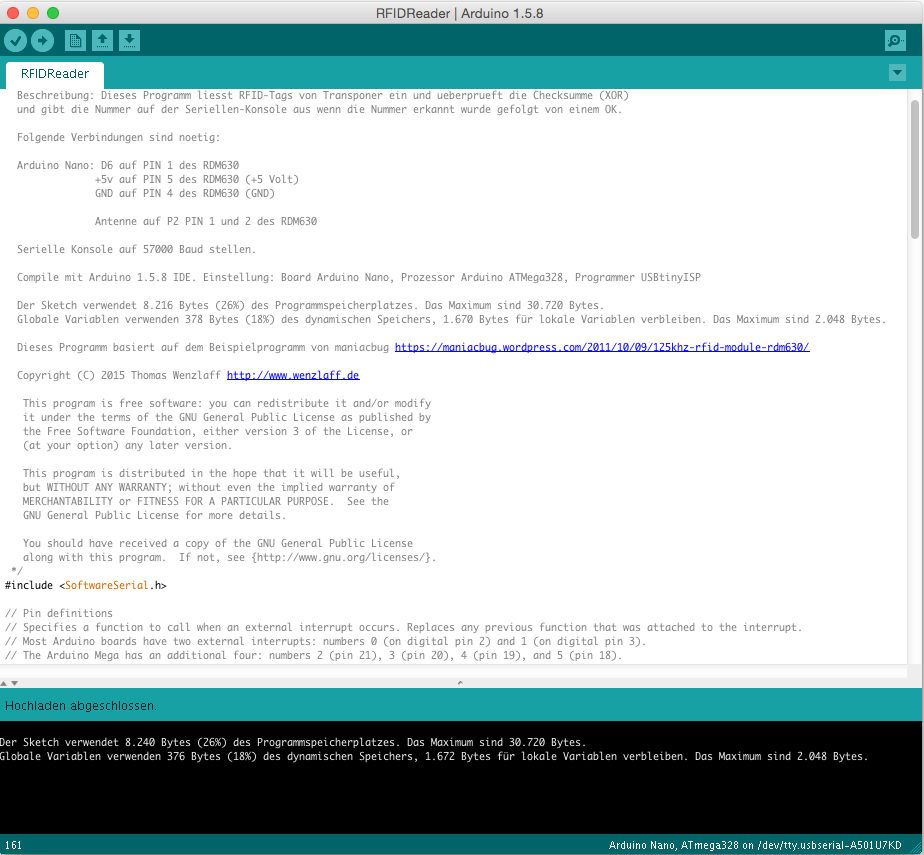
Compile mit Arduino 1.5.8 IDE. Einstellung: Board Arduino Nano, Prozessor Arduino ATMega328, Programmer USBtinyISP
Der Sketch verwendet 8.216 Bytes (26%) des Programmspeicherplatzes. Das Maximum sind 30.720 Bytes.
Globale Variablen verwenden 378 Bytes (18%) des dynamischen Speichers, 1.670 Bytes für lokale Variablen verbleiben. Das Maximum sind 2.048 Bytes.
Dieses Programm basiert auf dem Beispielprogramm von maniacbug https://maniacbug.wordpress.com/2011/10/09/125khz-rfid-module-rdm630/
Copyright (C) 2015 Thomas Wenzlaff http://www.wenzlaff.de
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details.
You should have received a copy of the GNU General Public License
along with this program. If not, see {http://www.gnu.org/licenses/}.
*/
#include <SoftwareSerial.h>
// Pin definitions
// Specifies a function to call when an external interrupt occurs. Replaces any previous function that was attached to the interrupt.
// Most Arduino boards have two external interrupts: numbers 0 (on digital pin 2) and 1 (on digital pin 3).
// The Arduino Mega has an additional four: numbers 2 (pin 21), 3 (pin 20), 4 (pin 19), and 5 (pin 18).
const int rfid_irq = 0;
// PIN 6 ist auf dem Nano der D6 oder der Pin 9 von rechts, wenn die Stecker rechts liegen
const int rfid_tx_pin = 6;
// RX wird nicht benoetigt
const int rfid_rx_pin = 7;
// Untertrueckung von Rauschen bzw. leer Ausgaben, evl. aendern
const long LEER = 16843009L;
// Baud Rate zum Host PC, evl. aendern
const long baudRate = 57600L;
// For communication with RFID module
SoftwareSerial rfid(rfid_tx_pin, rfid_rx_pin);
// Indicates that a reading is now ready for processing
volatile bool ready = false;
// Buffer to contain the reading from the module
uint8_t buffer[14];
uint8_t* buffer_at;
uint8_t* buffer_end = buffer + sizeof(buffer);
void rfid_read(void);
void setup(void)
{
// Oeffnet die Serielle Verbindung zum Host PC um die Ausgabe der RFID-Tags zu sehen
// Geschwindigkeit kann angepasst werden
Serial.begin(baudRate);
Serial.println("Starte RFID-Reader V. 1.0 von wenzlaff.info");
// Open software serial connection to RFID module
pinMode(rfid_tx_pin,INPUT);
// muss fest fuer das Modul auf 9600 stehen
rfid.begin(9600);
Serial.println("OK");
// Listen for interrupt from RFID module. Fallingfor when the pin goes from high to low.
attachInterrupt(rfid_irq,rfid_read,FALLING);
}
void loop(void)
{
if ( ready )
{
// Convert the buffer into a 32-bit value
uint32_t result = 0;
// Skip the preamble
++buffer_at;
// Accumulate the checksum, starting with the first value
uint8_t checksum = rfid_get_next();
// We are looking for 4 more values
int i = 4;
while(i--)
{
// Grab the next value
uint8_t value = rfid_get_next();
// Add it into the result
result <<= 8;
result |= value;
// Xor it into the checksum
checksum ^= value;
}
// Pull out the checksum from the data
uint8_t data_checksum = rfid_get_next();
// evl. die Nummer anpassen, oder die if abfrage loeschen
if (result != LEER){
if ( checksum == data_checksum ){
Serial.print(result);
Serial.println(" OK");
}
}
// We're done processing, so there is no current value
ready = false;
}
}
// Convert the next two chars in the stream into a byte and
// return that
uint8_t rfid_get_next(void)
{
// sscanf needs a 2-byte space to put the result but we
// only need one byte.
uint16_t result;
// Working space to assemble each byte
static char byte_chars[3];
// Pull out one byte from this position in the stream
snprintf(byte_chars,3,"%c%c",buffer_at[0],buffer_at[1]);
sscanf(byte_chars,"%x",&result);
buffer_at += 2;
return static_cast<uint8_t>(result);
}
void rfid_read(void)
{
// Only read in values if there is not already a value waiting to be
// processed
if ( ! ready )
{
// Read characters into the buffer until it is full
buffer_at = buffer;
while ( buffer_at < buffer_end )
*buffer_at++ = rfid.read();
// Reset buffer pointer so it's easy to read out
buffer_at = buffer;
// Signal that the buffer has data ready
ready = true;
}
}