Ups, da war der Raspberry Pi aber lange offline!
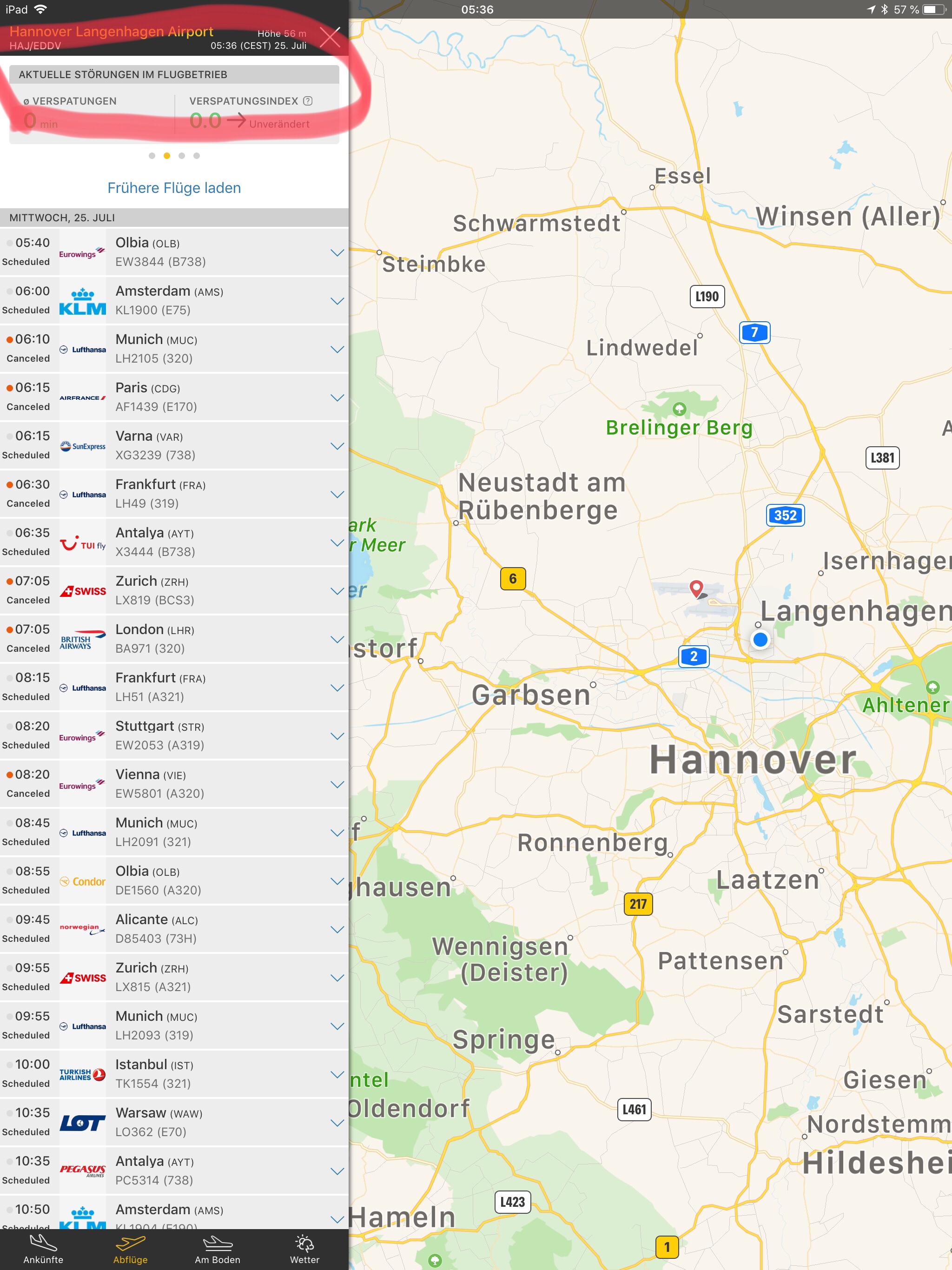
Was ist los in EDDV?
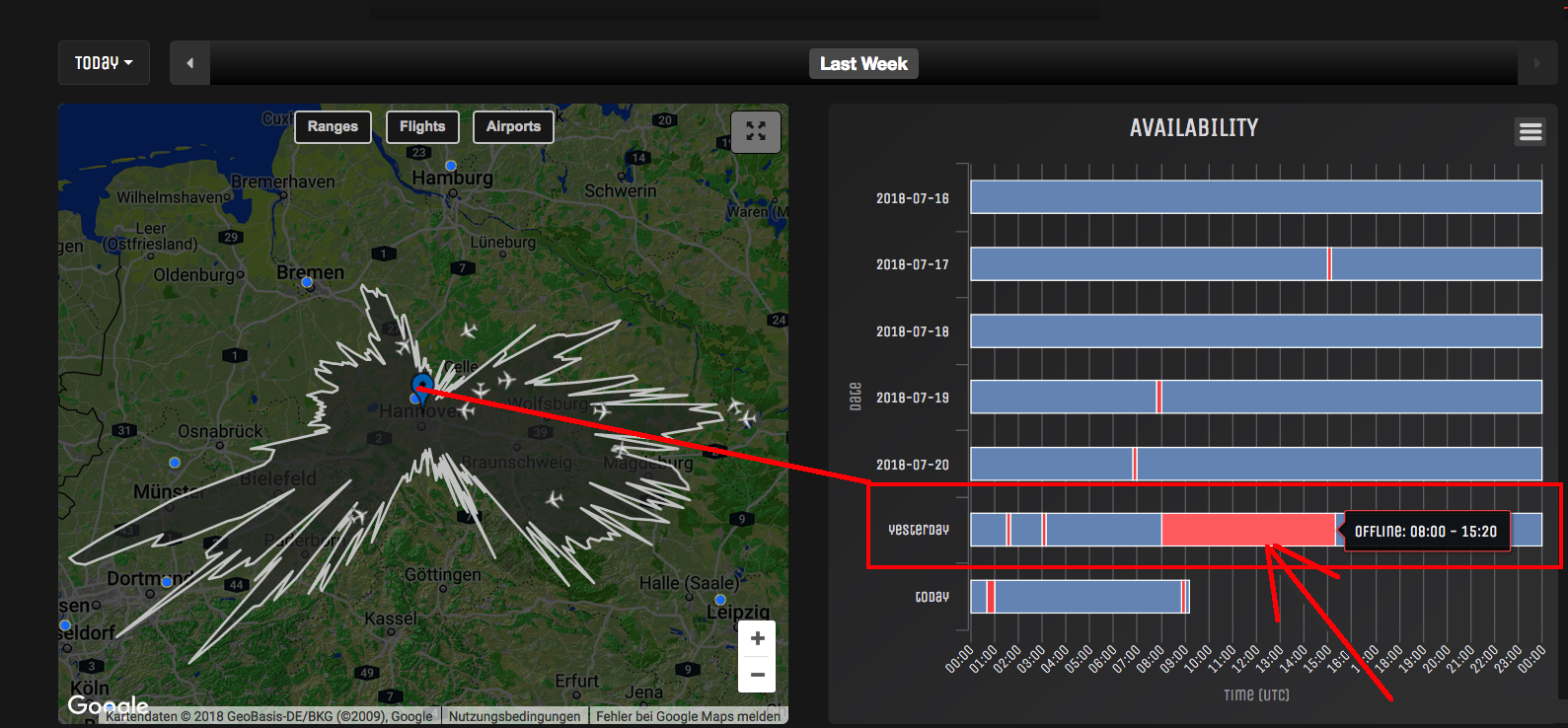
Da war wohl nur der Server offline, denn der PI läuft sein 182 Tagen ohne reboot:

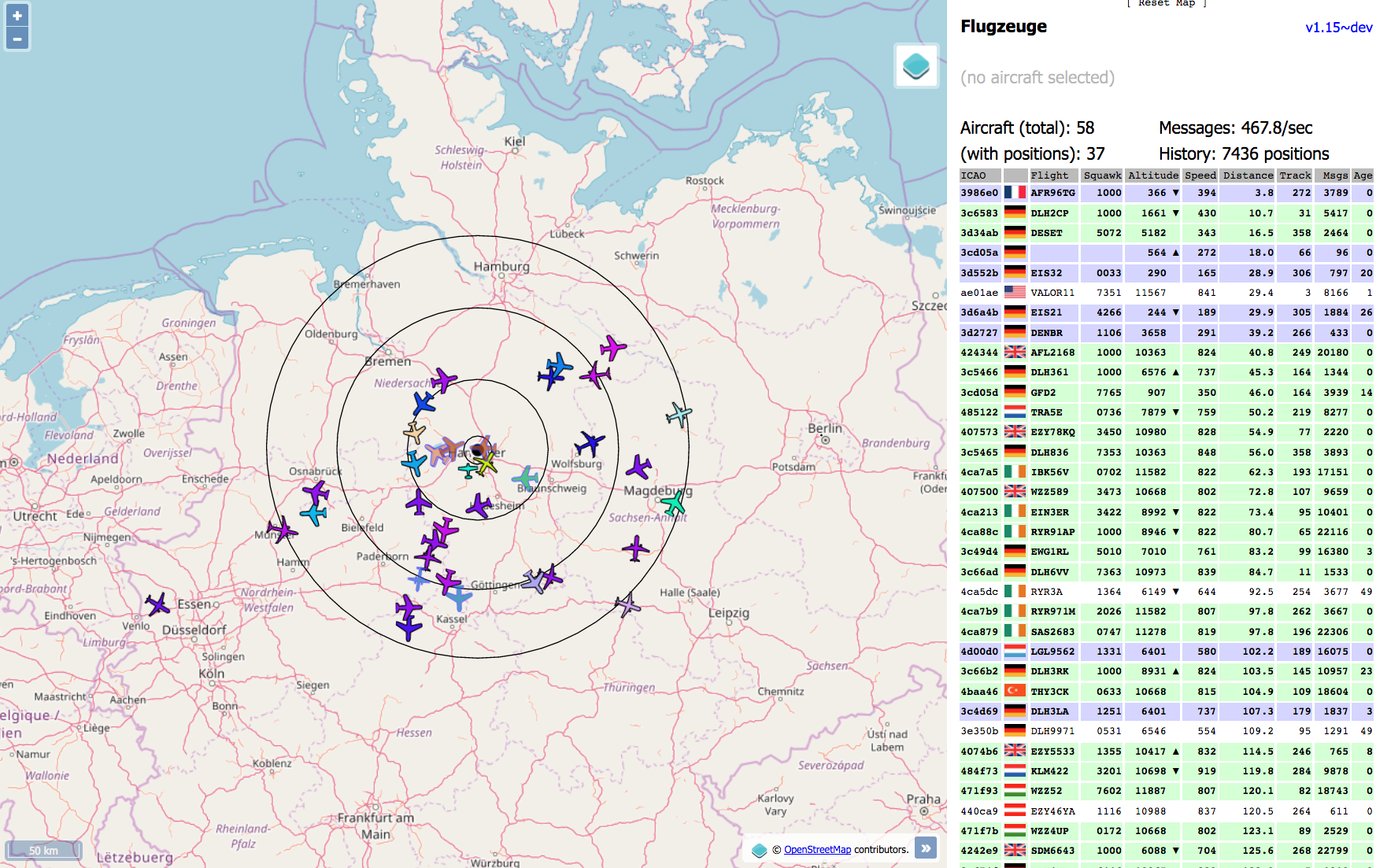
Was empfängt der Rasperry Pi denn so? Ca. 1500 Flugzeuge!

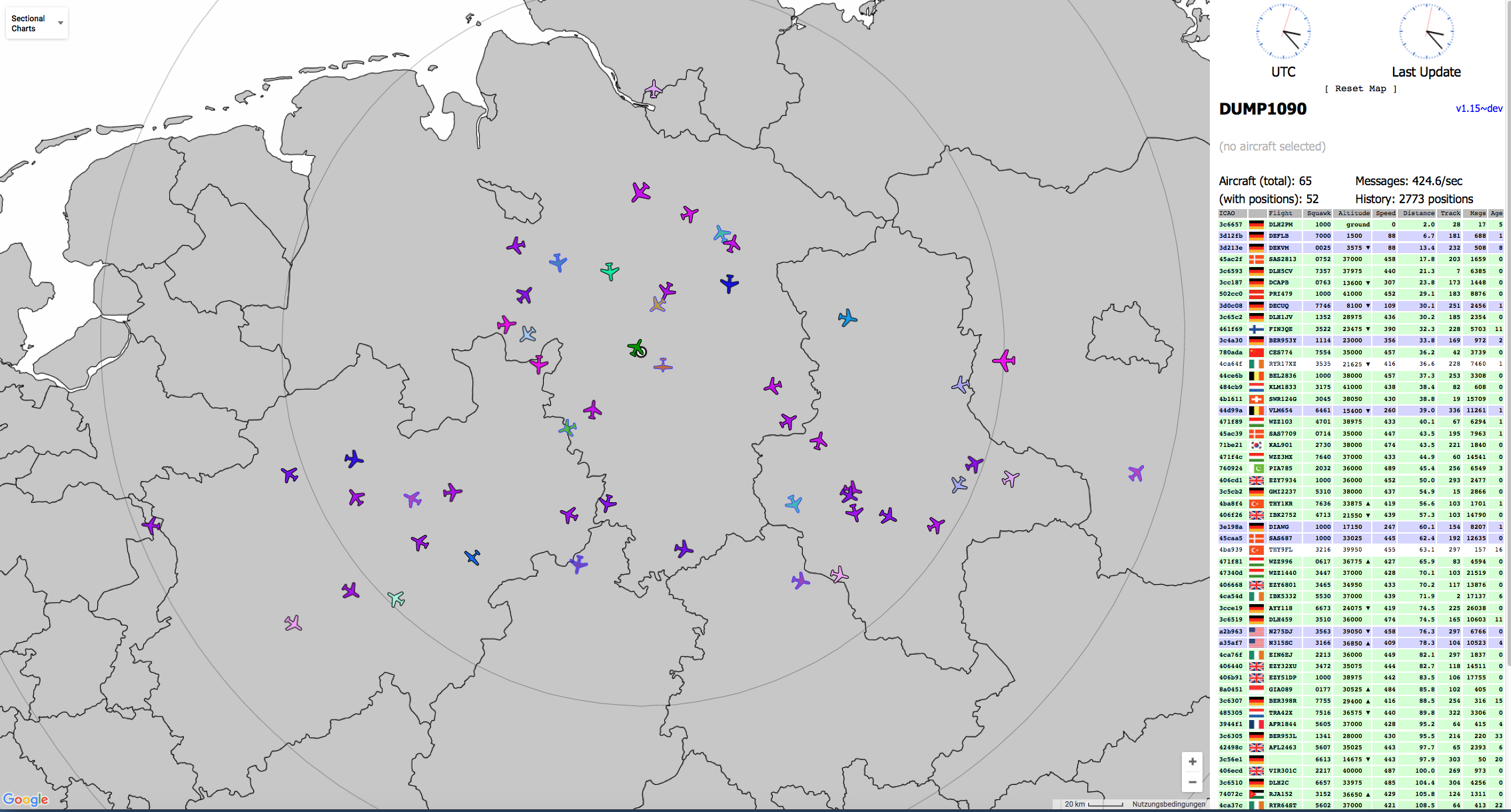
DUMP1090: Über 50 Flugzeug-Transponder mit Raspberry Pi empfangen
Über 50 Flugzeug-Transponder mit Raspberry Pi empfangen. Habe den Dipol mal nach drauße gehangen. Über 50 Transponder können empfangen werden
 Bis Berlin „DUMP1090: Über 50 Flugzeug-Transponder mit Raspberry Pi empfangen“ weiterlesen
Bis Berlin „DUMP1090: Über 50 Flugzeug-Transponder mit Raspberry Pi empfangen“ weiterlesen
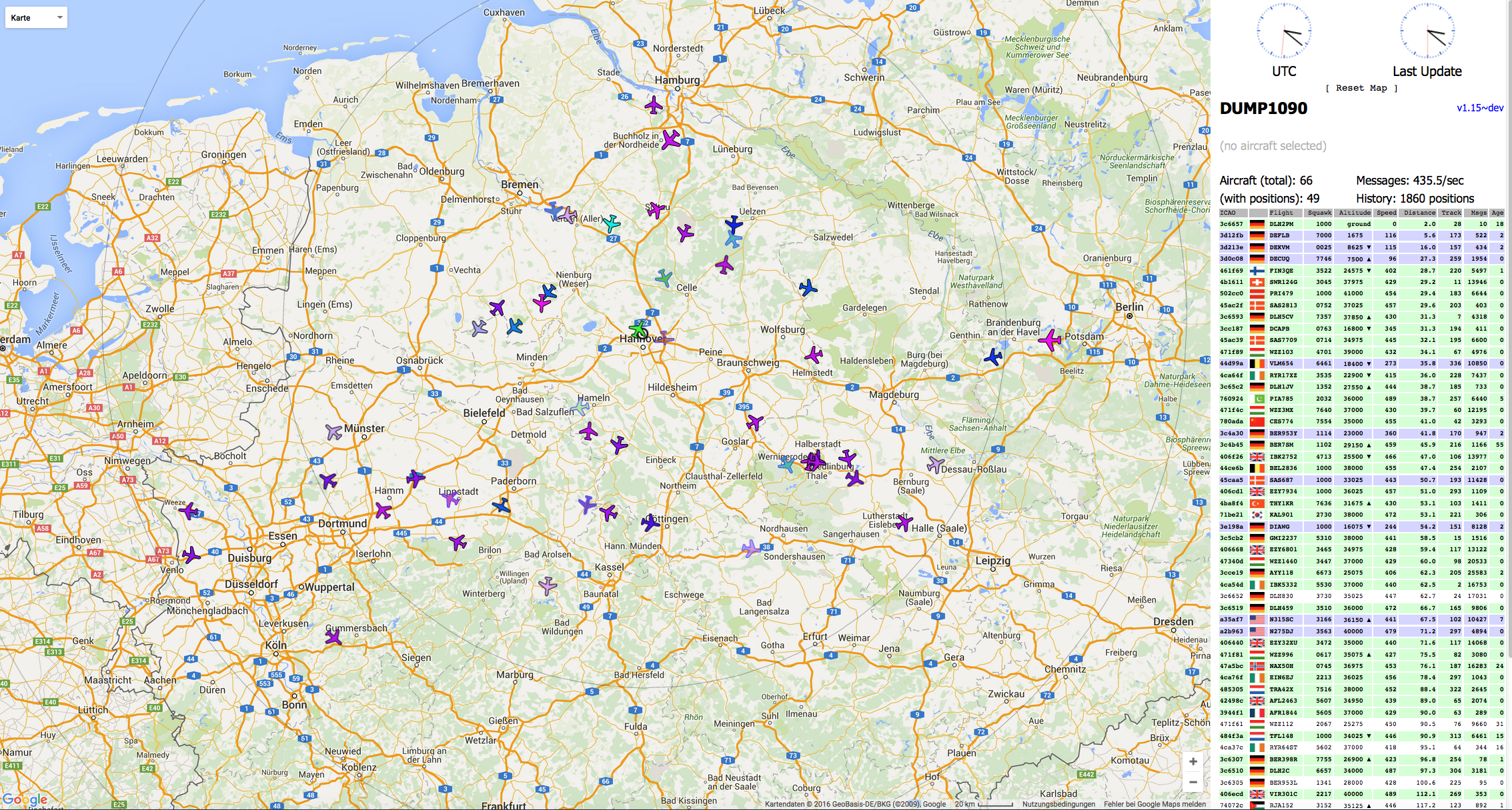
Was empfängt der Raspberry Pi im Moment über Dump1090 SDR?
Hier mal ein paar verschiedenen Ansichten, des aktuellen Empfang als 2D und 3D Diagramm:
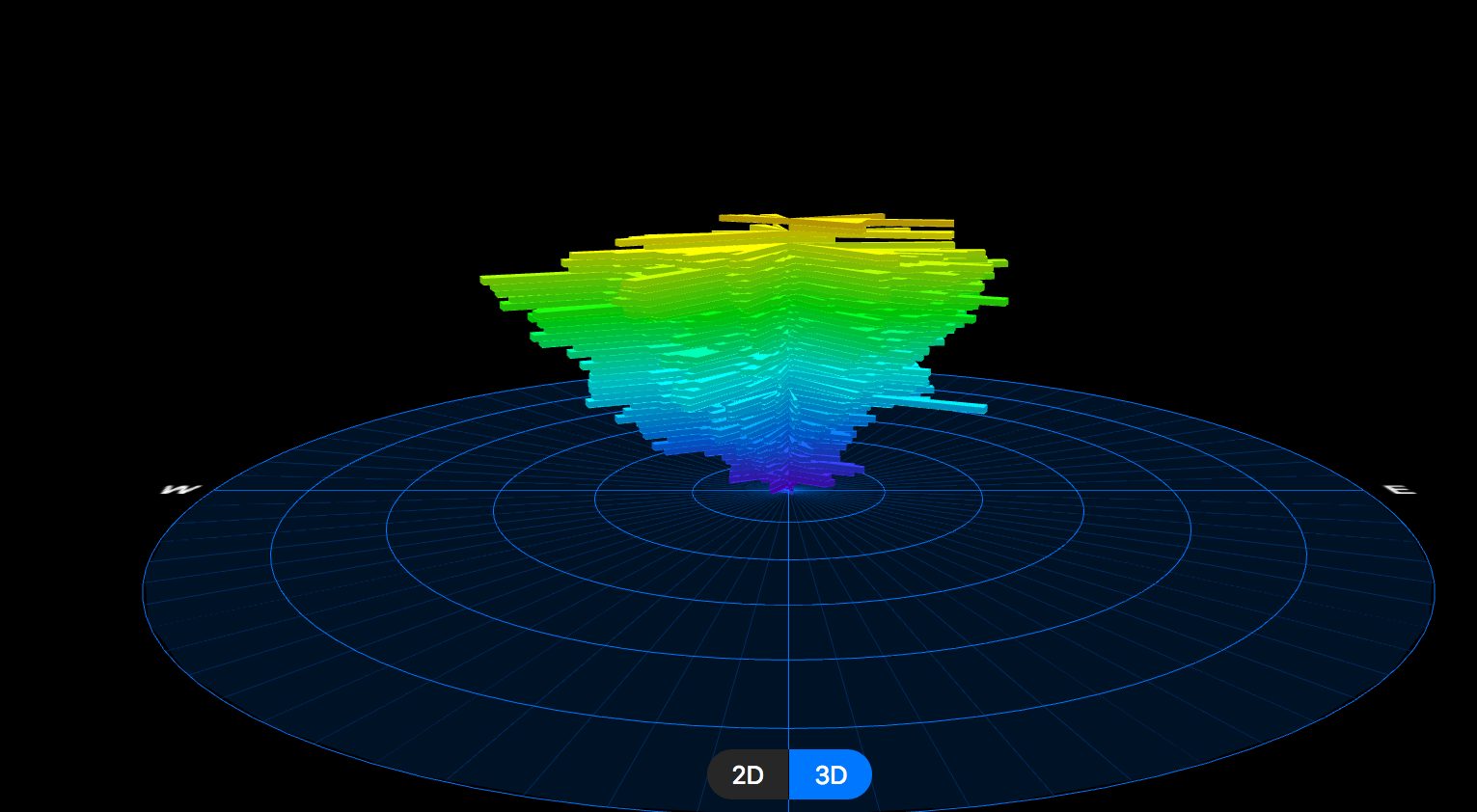
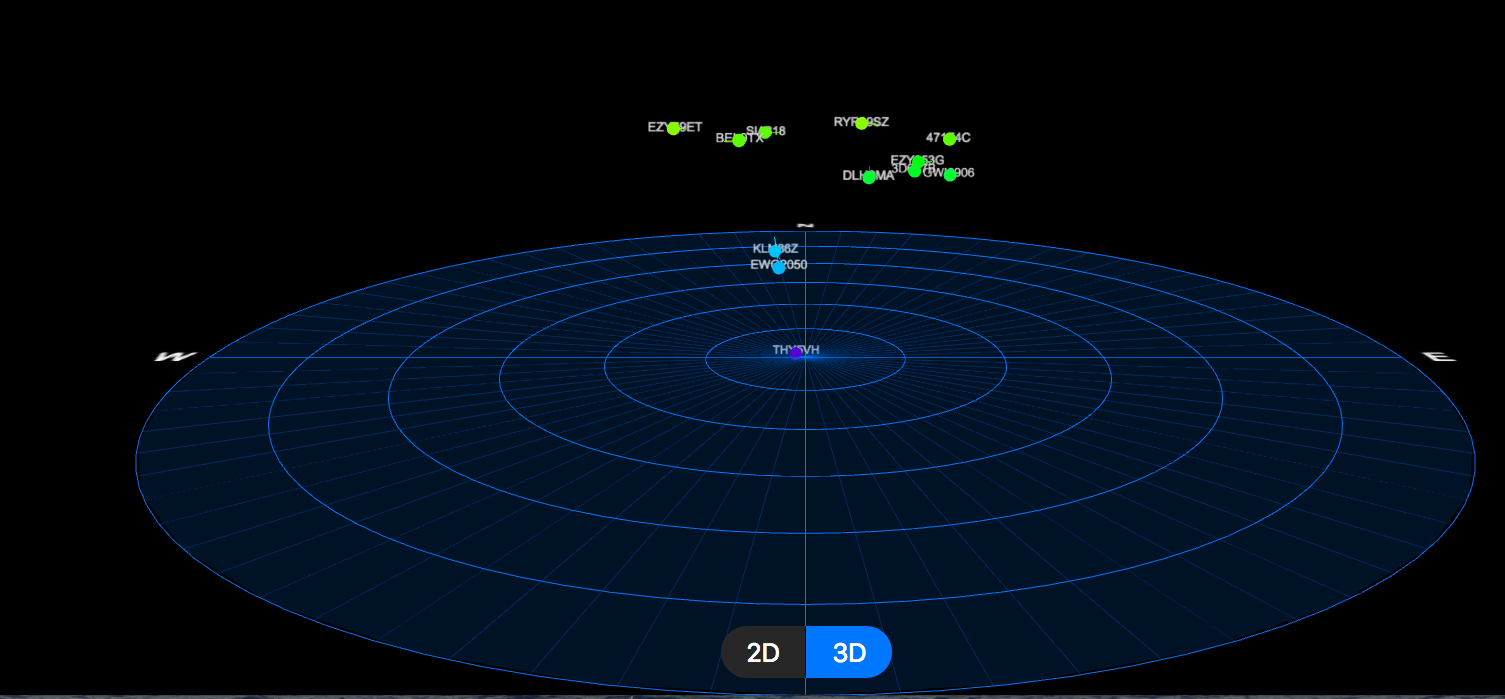
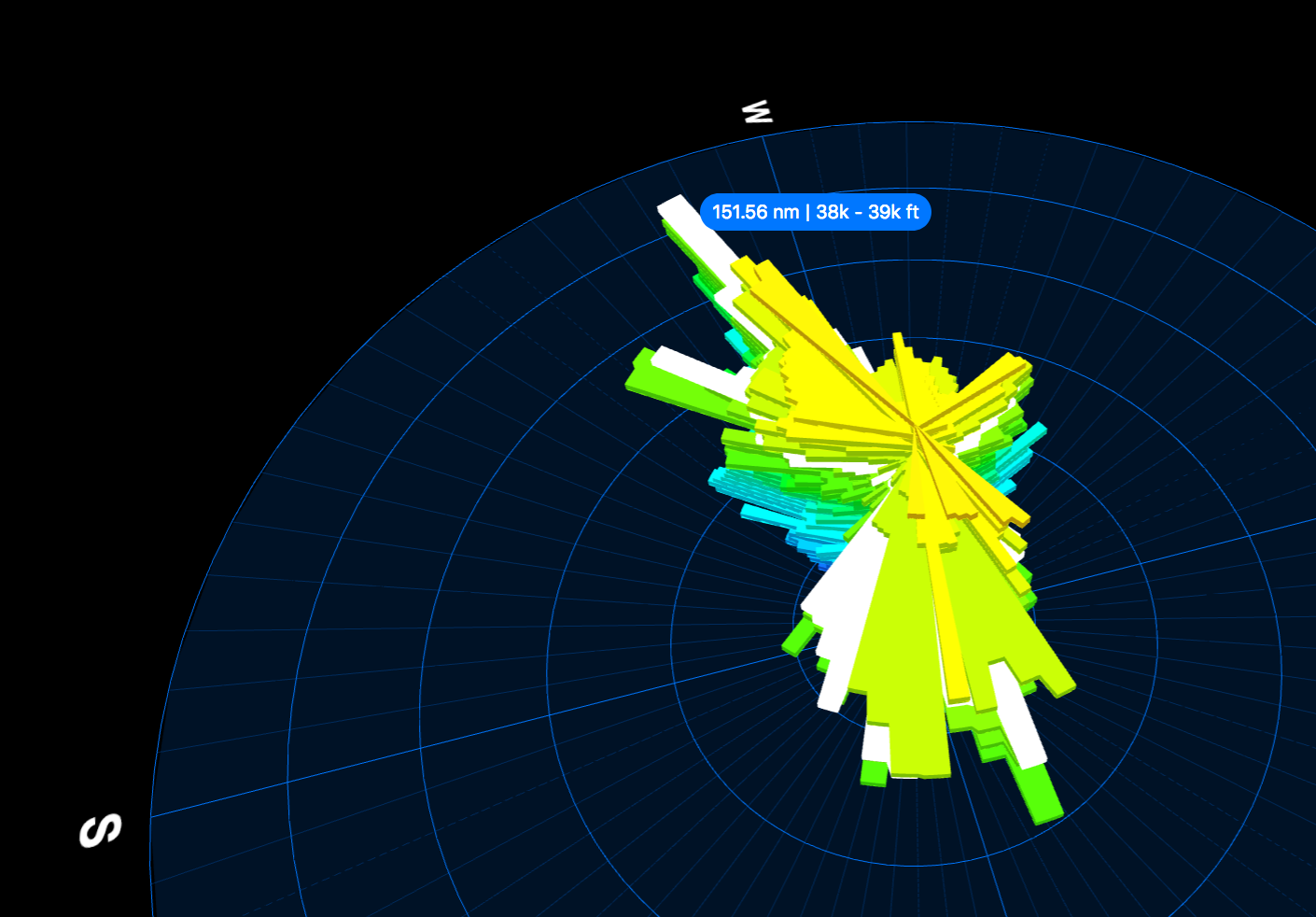
und die 2D „Was empfängt der Raspberry Pi im Moment über Dump1090 SDR?“ weiterlesen
Beluga Airbus A300 mit Raspberry Pi getrackt view via Settingssite von flightradar24 Feeder (dump1090)
Habe heute zum erstenmal unter Port http:///(pi-Adresse):8754/ eine neue Seite von dem flightradar24 Feeder entdeckt. Wenn man die Seite öffnet werden die Einstellungen angezeigt:
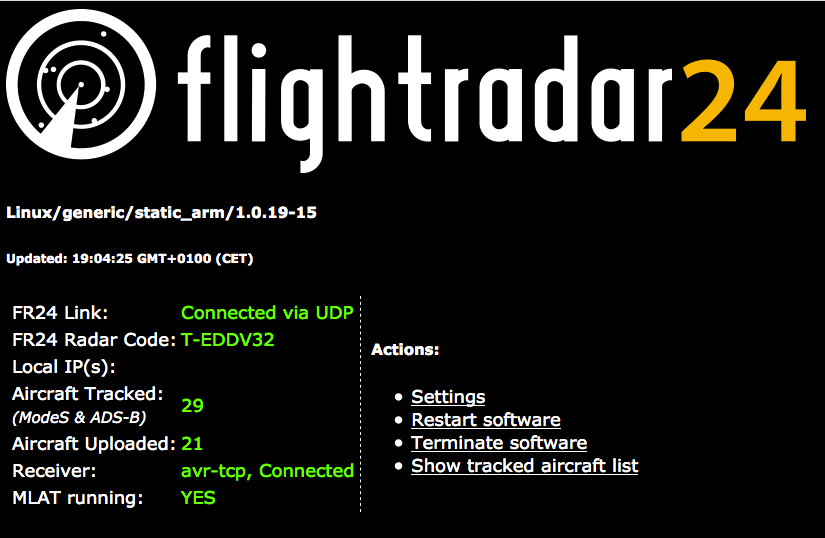
Klickt man auf Settings, könnte man sogar welche ändern: „Beluga Airbus A300 mit Raspberry Pi getrackt view via Settingssite von flightradar24 Feeder (dump1090)“ weiterlesen
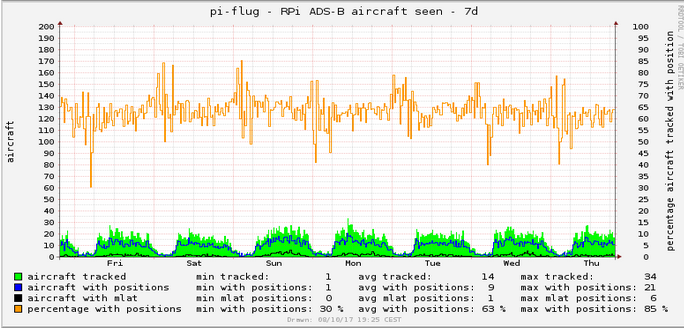
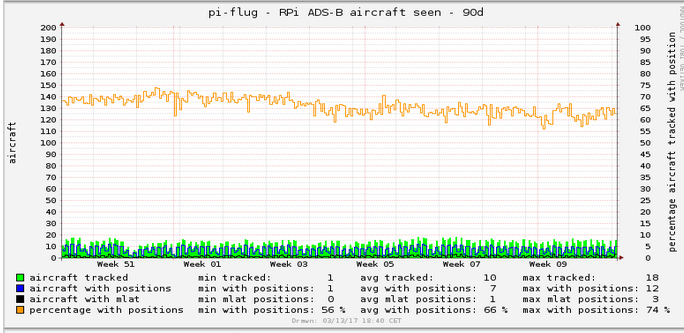
Das war 2017 der ADS-B Empfang in Hannover (EDDV, HAJ) mit einem Raspberry Pi.
So jeweils 130 Flugzeuge am Tag mit ADS-B empfangen:
 „Das war 2017 der ADS-B Empfang in Hannover (EDDV, HAJ) mit einem Raspberry Pi.“ weiterlesen
„Das war 2017 der ADS-B Empfang in Hannover (EDDV, HAJ) mit einem Raspberry Pi.“ weiterlesen
Neue PlaneFinder (3.7.20) Version für den Raspberry Pi in 5 Minuten noch in 2017 updaten!
Es gibt einen neuen PlaneFinder (3.7.20) Client für den Raspberry Pi und auch für Windows und Mac.
Hier einige der Änderungen seit 3.3.222:
- Improvements to ADS-B decoding
- New GPS view for Plane Finder Radar receivers
- Brand new map view including aircraft labels, photographs and additional metadata lookup
- Added colour-coded flightpaths to represent altitude
- Added the ability to mouse over flightpaths to view their speed and altitude at that any given point in time
- Improved Data View layout. Added the option to filter by additional fields
- Added the ability to set a Google Maps API key for users wishing to share their client webpages publicly (this is optional and not necessary when accessing the client locally)
- Rewritten HTTP parser to handle browser communication more reliably
- New 3D view to help you improve your reception
Wie kann der pfclient auf dem Raspberry Pi nun aktuallisiert werden? Das geht in 5 Minuten „Neue PlaneFinder (3.7.20) Version für den Raspberry Pi in 5 Minuten noch in 2017 updaten!“ weiterlesen
Anflug auf Hannover (EDDV, HAJ) mit Höhendiagramm eines A321 (CFG605) aus der تركيا
Eben ist der Flug CFG605 in Hannover gelandet. Es ist eine Condor A321 aus Antalya (AYT) mit 36 Minuten Verpätung. Intressant ist das Höhenprofile:

Oder hier mit Karte:

Die Höhe liegt bei 732 m auf der Höhe der A7. „Anflug auf Hannover (EDDV, HAJ) mit Höhendiagramm eines A321 (CFG605) aus der تركيا“ weiterlesen
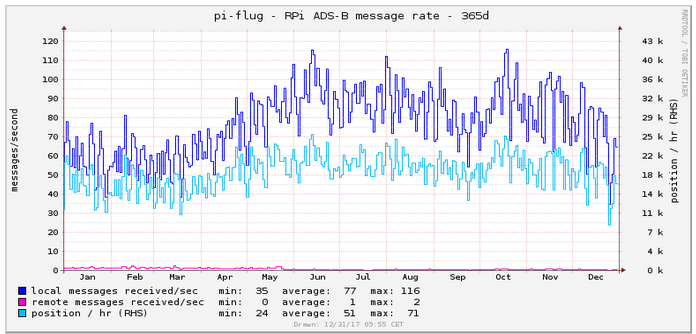
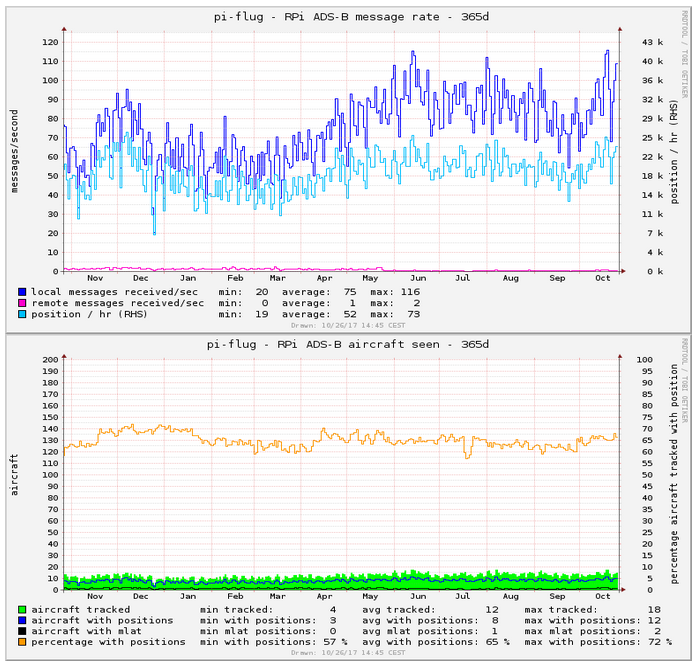
Jahresrückblick: 1 Jahr Raspberry Pi DUMP1090 Empfang in Hannover (HAJ, EDDV) mit ADS-B
Jahresrückblick: 1 Jahr (1. November 2016 – 31. Oktober 2017) Raspberry Pi DUMP1090 Empfang in Hannover (HAJ, EDDV). Nun habe ich die Daten von einem Jahr in der Datenbank. Hier die erste Auswertung des Transponder Empfangs in Hannover – Langenhagen – HAJ – EDDV:
Was hat der Raspberry Pi mit Dump1090 gestern so empfangen?

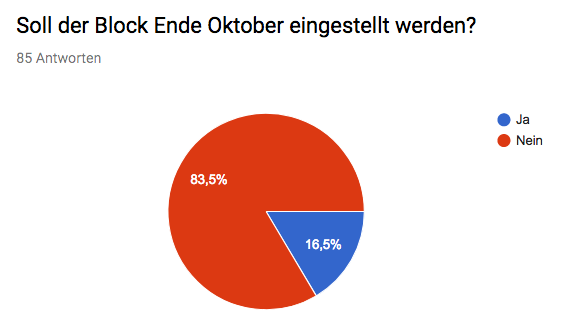
Ende Oktober, Air Berlin und Raspberry Pi Dump1090 Empfang einstellen?
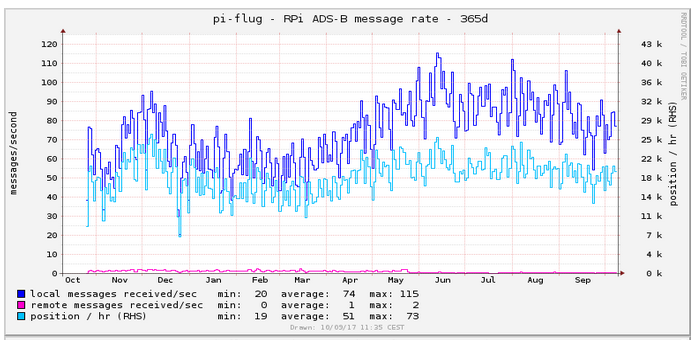
Ende Oktober habe ich die Flugdaten in Hannover mit dem Raspberry Pi und Dump1090 ein Jahr lang in meine Datenbank geschrieben. Der Rasberry Pi läuft nun über ein Jahr ohne zu booten bzw. abzustürzen, wie ein uptime zeigt:

Hier mal ein Jahresüberlblick, noch mit Air Berlin
Habe auch noch ein Foto von mir aus Hannover, da hier von der Zeit nur eins aus Düsseldorf abgebildet ist:

Soll ich diesen Block zu diesem Thema auch Ende Oktober einstellen? Eure Meinung, gern in diesem Google-Formular eingeben und auf Senden klicken, das Ergebniss werde ich dann hier veröffentlichen.
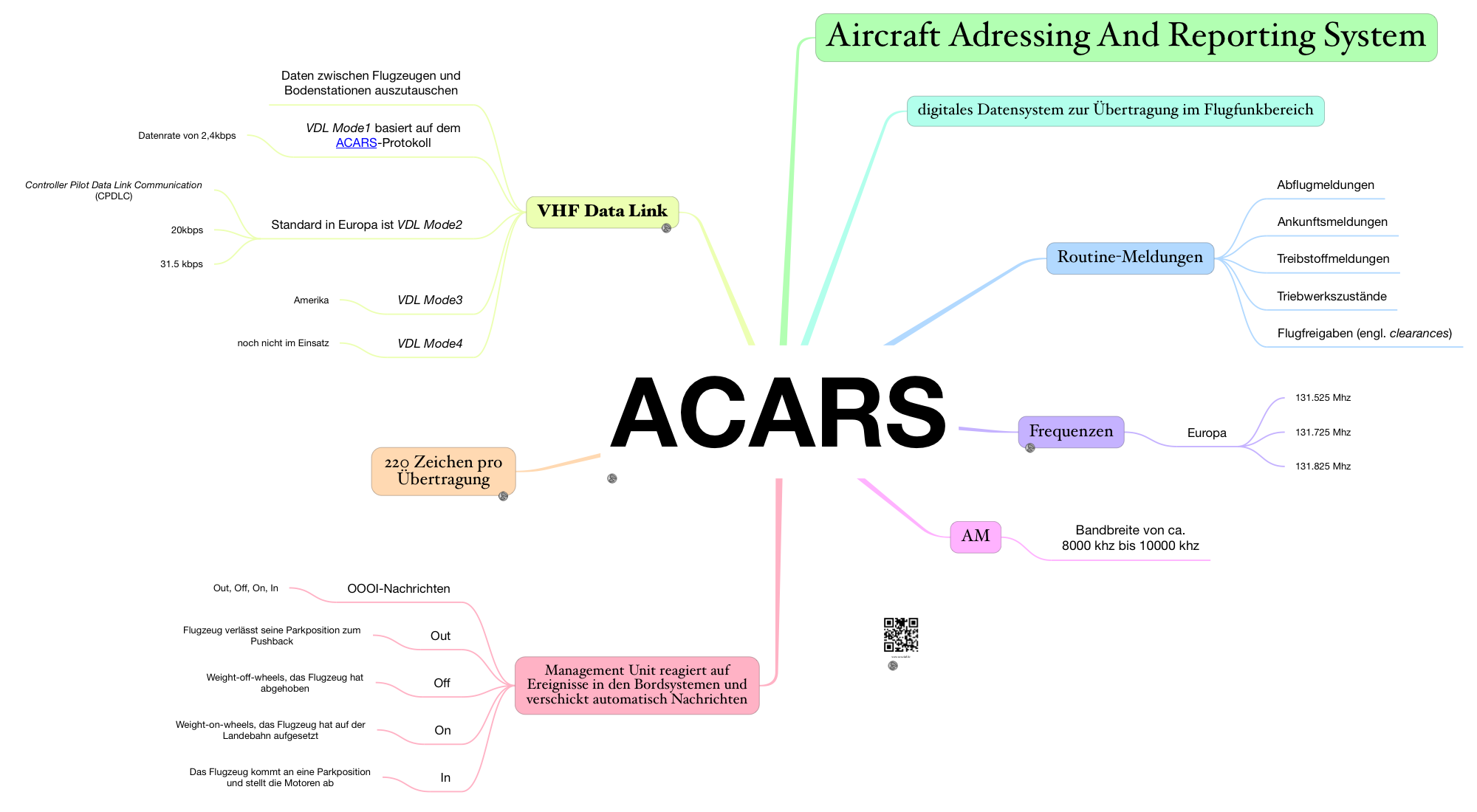
Wie wird ein Multi-Channel ACARS Decoder auf einem Raspberry Pi Zero W mit Software Defined Radio (SDR) installiert?
Flugzeuge senden nicht nur transponder Daten im Bereich von 1090 MHz via ADS-B die mit Dump1090 empfangen werden können.
Auch ACARS Daten auf ca. 130 MHz (3 Meter Band). Auch diese können mit eine Software Radio und eine kleinen Raspberry Pi Zero W empfangen werden. Diese ACARS Meldungen enthalten diverse Infos, wie aus dieser Mindmap hervorgeht:
Vorraussetzung ist ein frisch installiertes Debian Raspbian Stretch Lite Version 2017-08-16 und das ein rtl_test -t ohne Fehler auf der Konsole durchläuft. Das heißt, ein RTL-SDR Software Radio ist erfolgreich installiert. „Wie wird ein Multi-Channel ACARS Decoder auf einem Raspberry Pi Zero W mit Software Defined Radio (SDR) installiert?“ weiterlesen
Last 24 Hours Positions at Hanover Reported by Distance from Receiver
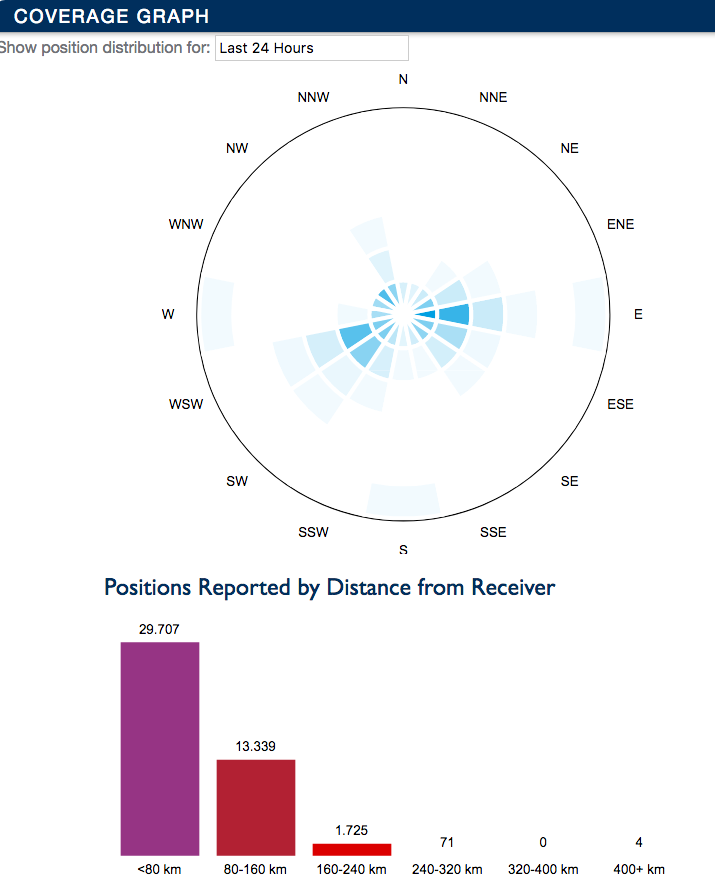
Das war eine Woche: to spot mit DUMP 1090 in EDDV mit dem Raspberry Pi
Anzahl Flugzeuge weltweit – (Tendenz steigend) – Aktuell 5055
Anzahl Flugzeuge weltweit. Hier die über The OpenSky Network, http://www.opensky-network.org empfangenen Flugzeuge an zufälligen Messzeitpunkten.
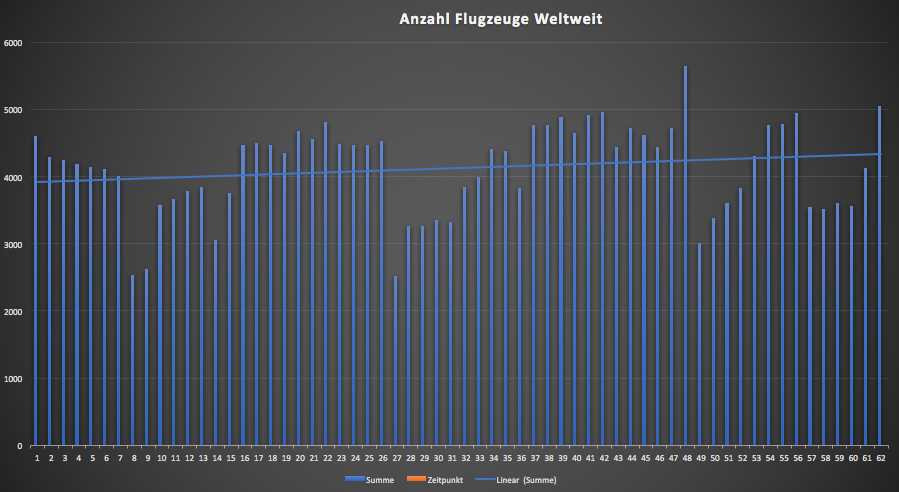
Die Datenbasis: „Anzahl Flugzeuge weltweit – (Tendenz steigend) – Aktuell 5055“ weiterlesen
Flughöhenanalyse mit Raspberry Pi und DUMP1090
Hier mal wieder eine Flughöhenanalyse mit Raspberry Pi und DUMP1090. Hier auf dem Blog hatte ich ja schon beschrieben, wie es mit Java über OpenSky erzeugt werden kann.
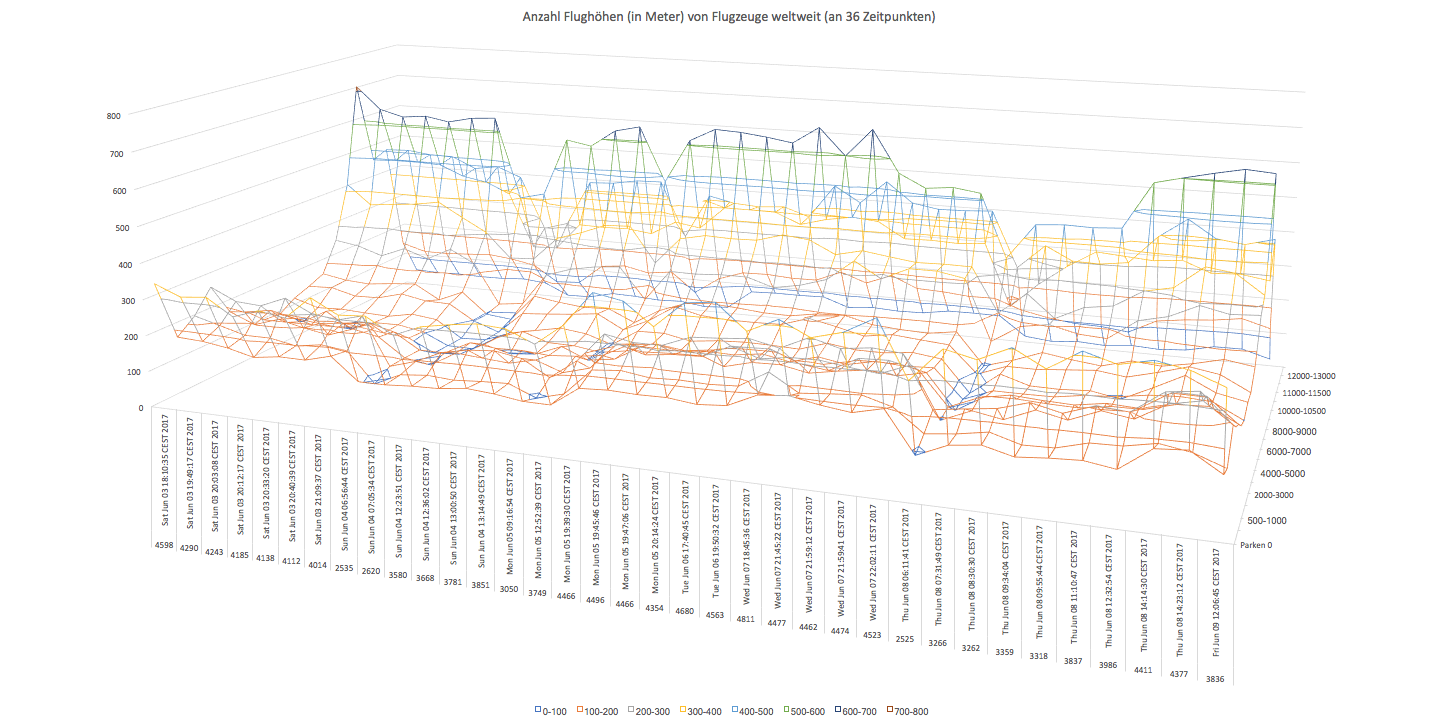
Hier die Datenbasis „Flughöhenanalyse mit Raspberry Pi und DUMP1090“ weiterlesen
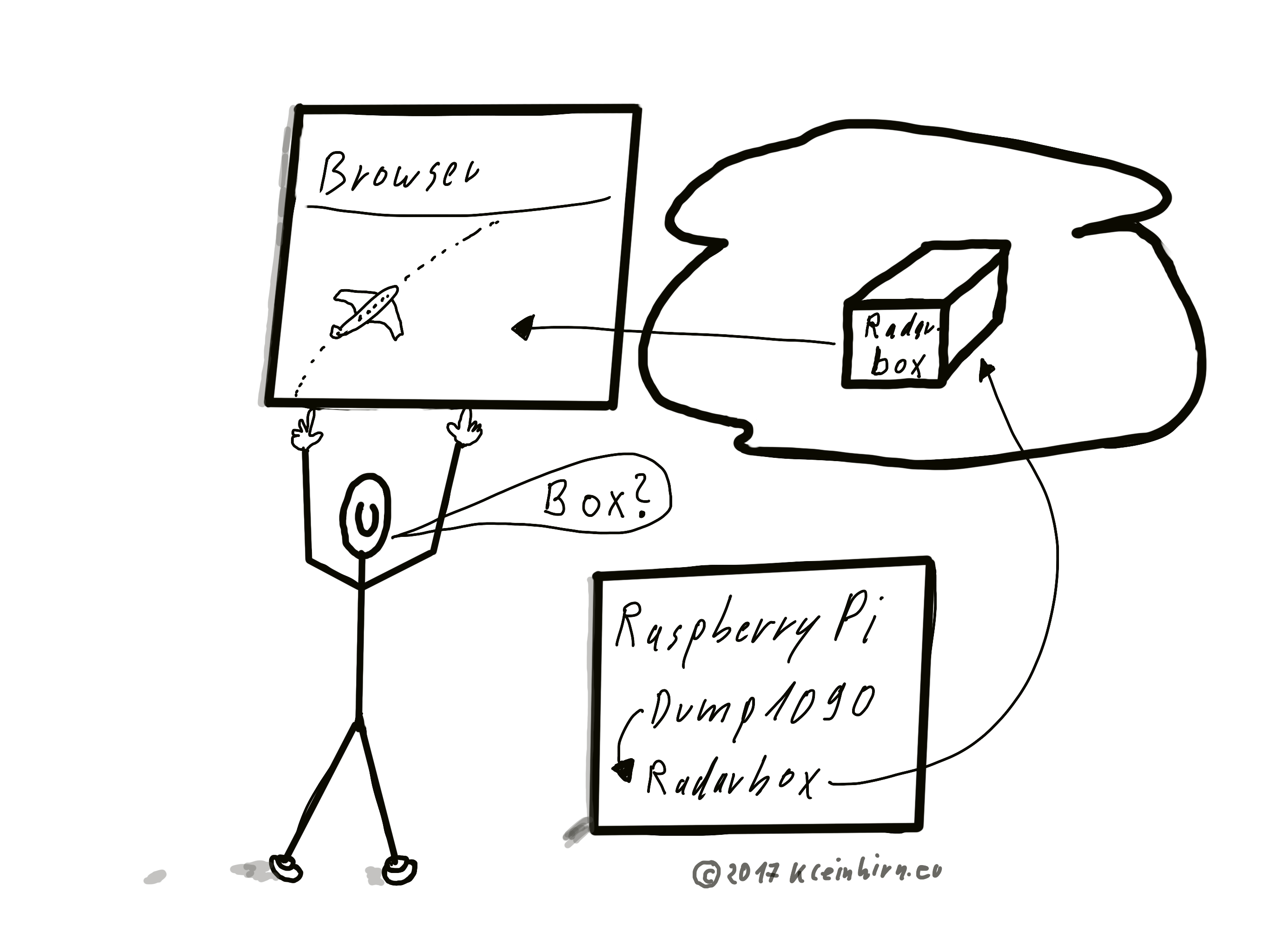
Wie werden Flugdaten von Dump1090 an RadarBox24.com gesendet?
Wer auf dem Raspberry Pi einen DUMP1090 laufen hat, kann seine Daten zu https://www.radarbox24.com senden. Das ist in ein paar Minuten installiert, da es ein Install-Script und einen Feeder von Radarbox24 gibt.
Zuerst legt man sich bei Radarbox24 einen Account an.
Dann müssen folgende Befehle auf der Konsole eingegeben werden: „Wie werden Flugdaten von Dump1090 an RadarBox24.com gesendet?“ weiterlesen
Was empfängt der Raspberry Pi so? Wie weit geht der Empfang? Und wie ist die Erreichbarkeit?

Raspberry Pi transponder Empfang seit Wochen ziemlich konstant …
Raspberry Pi empfang vom Samstag den 10.03.2017
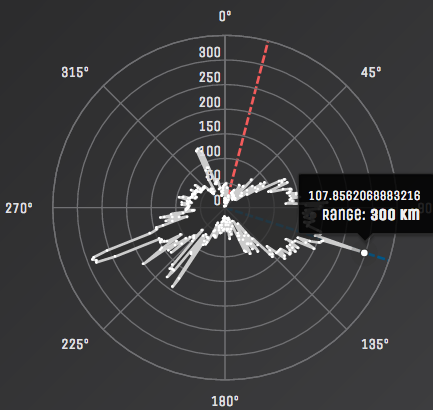
Wie war gestern der Empfang vom Raspberry Pi?

Ok, bis zu 300 km. Da müsste auch der Air India Flight #AI171 mit bei sein!
Raspberry Pi: Flugdaten mit DUMP1090 an OpenSkyNetwork senden
Wie können die Flugdaten an das OpenSkyNetwork gesendet werden? Mit der neuen Software brauch man auch keine Ports usw. im Router freigeben. Einfach den Feed installieren. So wie das auch für die anderen Dienste geht. Hier mal das Ergebnis von eben:
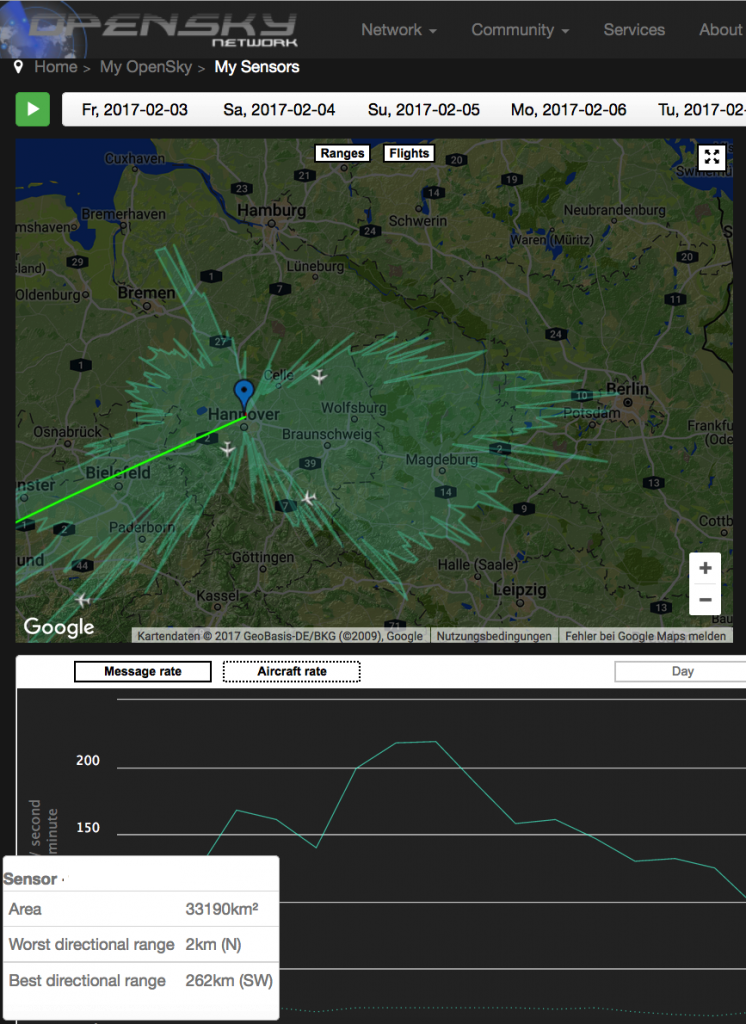
Es ist unten links, gut zu erkennen das der weiteste Empfang 262 km ist. Cool.
Zuerste einen kostenlosen Account bei OpenSkyNetwork anmelden.
Dann wie hier beschrieben die Software auf dem Raspberry Pi installieren. Das geht aber einfacher so …
|
1 2 3 4 |
# wir holen uns die aktuelle Feeder Software wget https://opensky-network.org/files/firmware/opensky-feeder_latest_armhf.deb # und installieren die sudo dpkg -i opensky-feeder_latest_armhf.deb |
Es kommen dann noch die folgenden Setup Dialoge, die natürlich mit den eigenen Werten angepasst werden müssen:
Zuerst den Breitengrad, (Latitude) wo man wohnt:
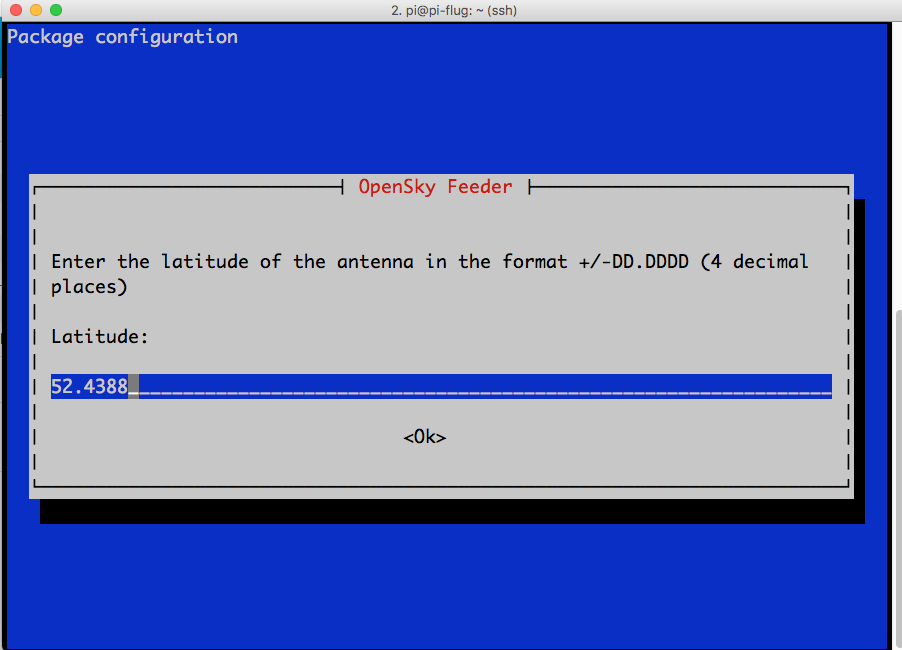
Dann die Longitude (Längengrad): „Raspberry Pi: Flugdaten mit DUMP1090 an OpenSkyNetwork senden“ weiterlesen
Raspberry Pi: Flugzeuge Erfassung jetzt mit Blacklist in Version (0.0.7) auf Maven Central veröffentlicht
Bei der Benachrichtigung stören solche Ausbildungsflüge:
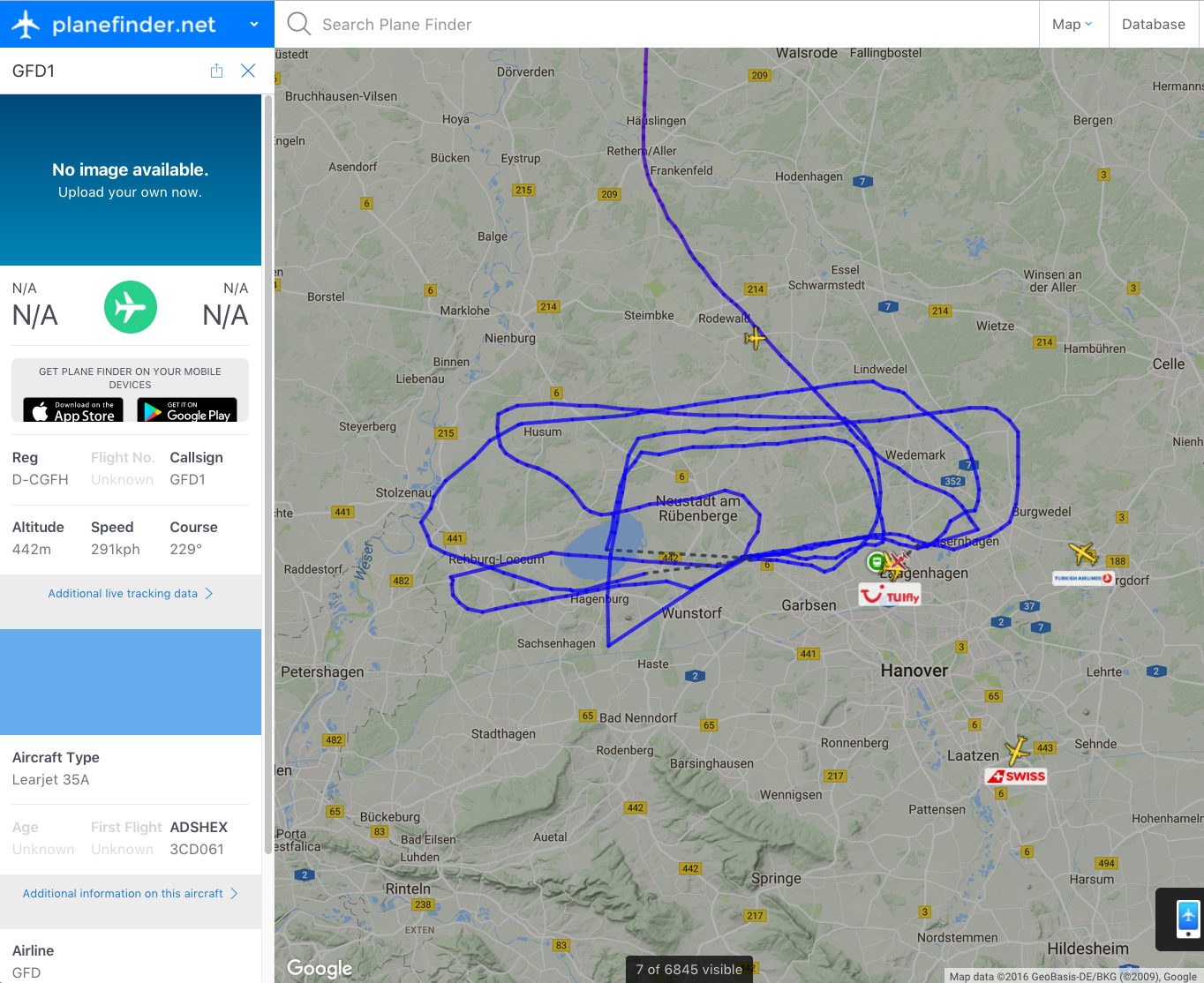
Bei denen will ich nicht per Pushover benachrichtigt werden. „Raspberry Pi: Flugzeuge Erfassung jetzt mit Blacklist in Version (0.0.7) auf Maven Central veröffentlicht“ weiterlesen
Java Wrapper für die Dump1090 Schnittstelle
Java Wrapper für die Dump1090 Schnittstelle.
Dieses Projekt ist eine Javaschnittstelle für den Zugriff auf die Daten von Dump1090 per Java Objekte.
Mit dieser Javaschnittstelle können einfach Pushover Nachrichten an jedes Handy bzw. Tablet versendet werden wenn ein Flugzeug startet oder landet. Da wir in der nähe vom Flughafen Hannover (EDDV, HAJ) leben, sehen wir gerne Flugzeuge starten und landen. Die beiden Start.- und Landebahnen liegen in Ost-West Richtung. Wenn wir aus dem Küchenfenster schauen oder wenn wir auf der Terrasse sitzen, sehen wir alle Flugzeuge die von Osten aus ankommen bzw. in die Richtung wegfliegen. Nun möchte ich gerne eine Nachricht mit Tonsignal mit Höhe, Geschwindigkeit, Flugnummer usw. auf mein Handy erhalten, wenn ein Flugzeug aus dem Osten zum landen ankommt bzw. in Richtung Osten starte. Alle anderen Flugzeuge die in die andere Richtung starten bzw. landen sollen nicht berücksichtigt werden. Auch nicht Flugzeuge die nur Hannover überfliegen.
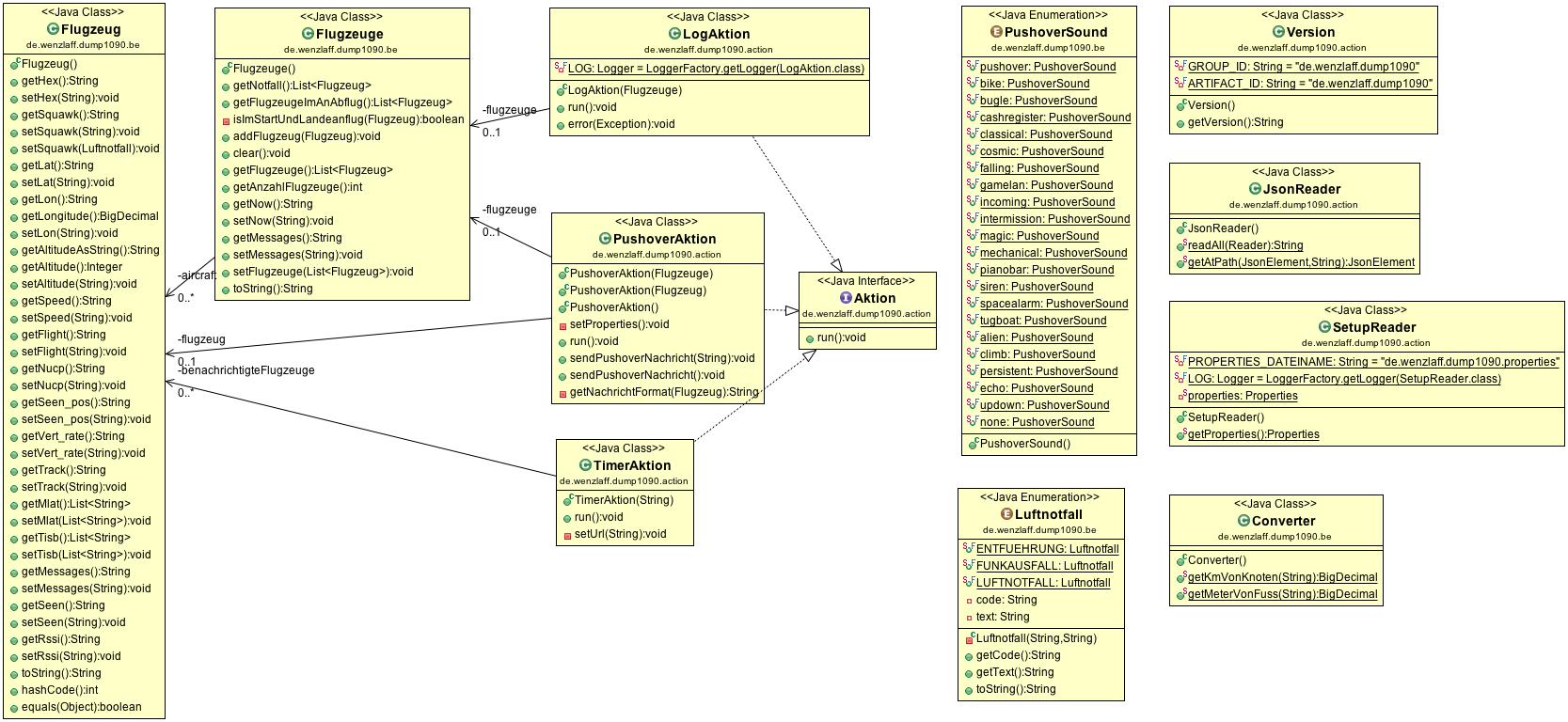
Auch soll eine Pushover versendet werden wenn ein Luftnotfall (med. Notfall, Entführung usw. ) per Transponder gemeldet wird.
„Java Wrapper für die Dump1090 Schnittstelle“ weiterlesen
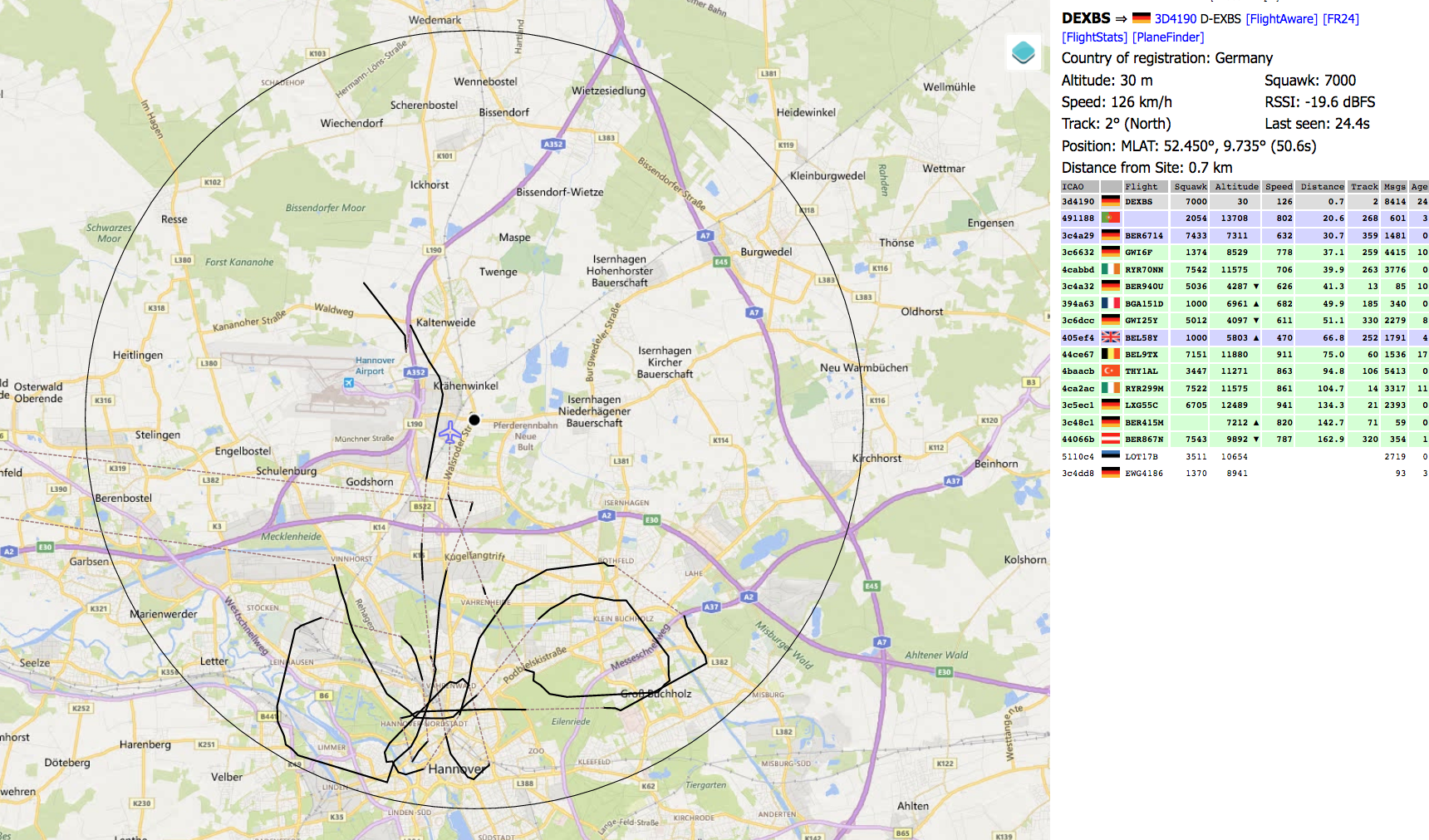
Cessna (172S Skyhawk SP) wird vom Raspberry Pi empfangen
Muss das sein? Können die nicht in Nevada ihre Flugübungen machen?
|
1 2 3 4 5 6 7 8 9 10 11 |
2016-11-23 19:17:24 INFO TimerAktion:86 - ---------> Nachricht senden: Flugzeug [hex=3d4190, squawk=7000, lat=52.389283, lon=9.745501, altitude=1900 Fuss, speed=73 Knoten/h, flight=DEXBS , nucp=0, seen_pos=30.8, vert_rate=-128, track=81, messages=7626, seen=0.4, rssi=-12.8, mlat=[lat, lon, track, speed, vert_rate], ] 2016-11-23 19:17:24 INFO PushoverAktion:122 - Versende Pushover Aktion mit folgender Nachricht: Flugzeug Flug: DEXBS, Höhe: 580 m, Geschwindigkeit: 136 km/h, HEX: 3D4190, Squawk: 7000, Lat: 52.389283, Lon: 9.745501 2016-11-23 19:17:24 INFO PushoverAktion:125 - Nachrichten URL: http://fr24.com/3d4190 2016-11-23 19:18:24 DEBUG Flugzeuge:82 - OK, Flugzeug im Landeanflug erfasst: Flugzeug [hex=3d4190, squawk=7000, lat=52.411116, lon=9.797372, altitude=1800 Fuss, speed=99 Knoten/h, flight=DEXBS , nucp=0, seen_pos=8.2, vert_rate=384, track=74, messages=7813, seen=1.0, rssi=-6.2, mlat=[lat, lon, track, speed, vert_rate], ] 2016-11-23 19:19:24 DEBUG Flugzeuge:82 - OK, Flugzeug im Landeanflug erfasst: Flugzeug [hex=3d4190, squawk=7000, lat=52.389888, lon=9.813930, altitude=1500 Fuss, speed=45 Knoten/h, flight=DEXBS , nucp=0, seen_pos=4.1, vert_rate=-512, track=169, messages=7966, seen=0.1, rssi=-25.2, mlat=[lat, lon, track, speed, vert_rate], ] 2016-11-23 19:20:24 DEBUG Flugzeuge:82 - OK, Flugzeug im Landeanflug erfasst: Flugzeug [hex=3d4190, squawk=7000, lat=52.395195, lon=9.763314, altitude=1400 Fuss, speed=106 Knoten/h, nucp=0, seen_pos=8.2, vert_rate=64, track=287, messages=8078, seen=0.1, rssi=-23.4, mlat=[lat, lon, track, speed, vert_rate], ] 2016-11-23 19:21:24 DEBUG Flugzeuge:82 - OK, Flugzeug im Landeanflug erfasst: Flugzeug [hex=3d4190, squawk=7000, lat=52.414282, lon=9.747698, altitude=900 Fuss, speed=92 Knoten/h, flight=DEXBS , nucp=0, seen_pos=22.3, vert_rate=128, track=321, messages=8193, seen=0.0, rssi=-14.4, mlat=[lat, lon, track, speed, vert_rate], ] |
Raspberry Pi: Dump1090 erzeugt auch JSON-Dateien die extern verwendet werden können
Dump1090 erzeugt auch JSON-Dateien, die periodisch aktualisiert werden und die auch extern verwendet werden können.
Dies sind ua. die folgenden Dateien:
- aircraft.json
- stats.json
- receiver.json
- history_0.json, history_1.json, …, history_119.json
Die genaue Dokumentation ist hier zu finden.
Über den Browser kann man auf diese Dateien z.B. so zugreifen, wenn ein externer Server verwendet wird:
http://(Raspberry Pi Adfresse)/dump1090/data/aircraft.json
im Dateisystem sind sie unter
/run/dump1090-mutability
zu finden.
Die aircraft.json liefert dann z.B. die folgenden Infos: „Raspberry Pi: Dump1090 erzeugt auch JSON-Dateien die extern verwendet werden können“ weiterlesen
Update des Raspberry Pi mit PiAware von 2.1 auf 3.5.3 und Bing Map einstellen
Bin nun wieder von meiner Weltreise zurück. In der zwischenzeit gab es einige Updates.
Es gibt eine neue Version von PiAware mit der Nummer 3.5.3 Deshalb diese Version laden und gleich das ganze System updaten:
|
1 2 3 4 5 6 7 |
wget http://flightaware.com/adsb/piaware/files/packages/pool/piaware/p/piaware-support/piaware-repository_3.5.3_all.deb sudo dpkg -i piaware-repository_3.5.3_all.deb sudo apt-get update sudo apt-get upgrade sudo apt-get install piaware piaware -v # Ergebnis 3.5.3 |
Dann auch gleich dump1090-mutability_1.15~dev neu erstellen und installieren: „Update des Raspberry Pi mit PiAware von 2.1 auf 3.5.3 und Bing Map einstellen“ weiterlesen
Wegen schönen Wetters wird die Antenne mal draußen montiert. Wie ist der Empfang mit dem Raspberry Pi in HAJ (EDDV)?

Normalerweise habe ich die Antenne drinnen. Da es heute aber so schön ist, wird sie mal draußen angebracht

und schon ist der Empfang fast doppelt so groß und fast 300 Km weit:
oder hier
Hier auf Twitter kann jeder in Echtzeit mit 5 Minuten Verzögerung die Anzahl ablesen, da ein Raspberry Pi über node-red die Ergebnisse postet:
Anzahl #Flugzeuge in #Hannover (#HAJ #EDDV) 51 angefragt per #ADSB am Sat Jun 04 2016 17:26:28 GMT+0200 (CEST) per #Raspberry #Pi
— Thomas Wenzlaff (@twusb) 4. Juni 2016
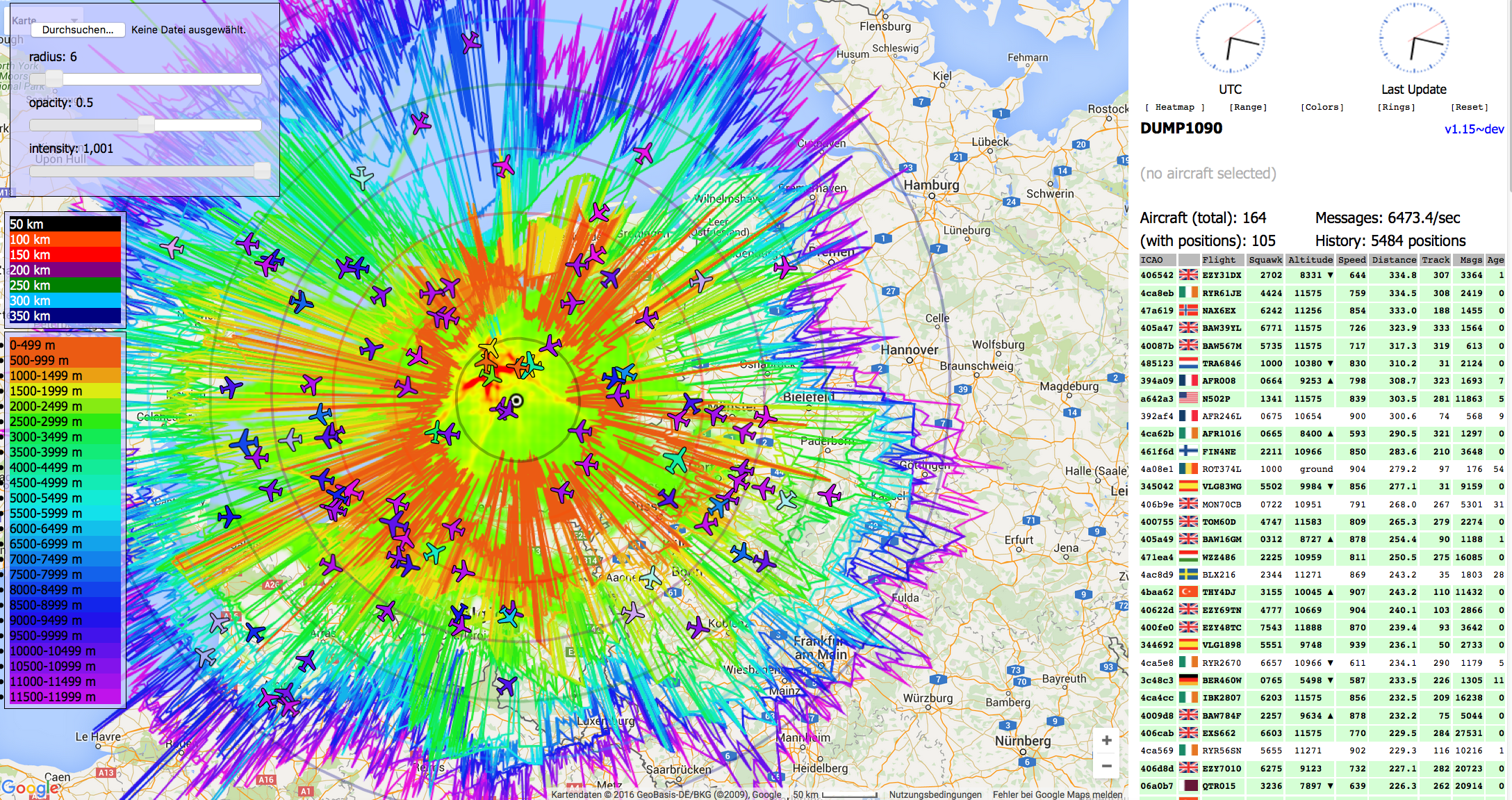
Docker Image für Dump1090-Mutability auf dem Raspberry Pi am Beispiel aus Utrecht – Niederlande in 10 min testen
Mal einen Docker Container von Ted Sluis mit DUMP1090 aus den Niederlande testen. Man braucht dazu keine Antenne.
Cool 164 Flugzeuge, das ist ja viel mehr, als hier in EDDV. Aber hier wird auch gestreikt. Wer wie in einem Blog-Eintrag beschrieben, docker am laufen hat, braucht nur mit einer Zeile den Container auf dem Raspberry Pi starten:
|
1 |
sudo docker run -d -h dump80 -p 8080:80 tedsluis/dump1090-mutability:v1.15_heatmaprangeview_arm |
{kind=link}
Wie kann die Anzahl der gerade empfangenen Flugzeuge mit DUMP1090 auf einem Raspberry Pi an ThingSpeak.com mit jq gesendet werden?
Wie kann die Anzahl der gerade empfangenen Flugzeuge mit DUMP1090 auf einem Raspberry Pi an ThingSpeak.com mit jq gesendet werden?
Wir verwenden ein kleines bash Script, welches über jq die aircraft.json Datei auswertet. Diese Daten werden dann automatisch alle 5 Minuten per crontab an ThingSpeak gesendet.
Der jq ist ein Kommandline JSON Tool, das den Input der JSon aircraft.json Datei verwendet und das gefilterte Ergebnis wieder ausgibt. In diesem Fall die Anzahl der Flugzeuge. „Wie kann die Anzahl der gerade empfangenen Flugzeuge mit DUMP1090 auf einem Raspberry Pi an ThingSpeak.com mit jq gesendet werden?“ weiterlesen