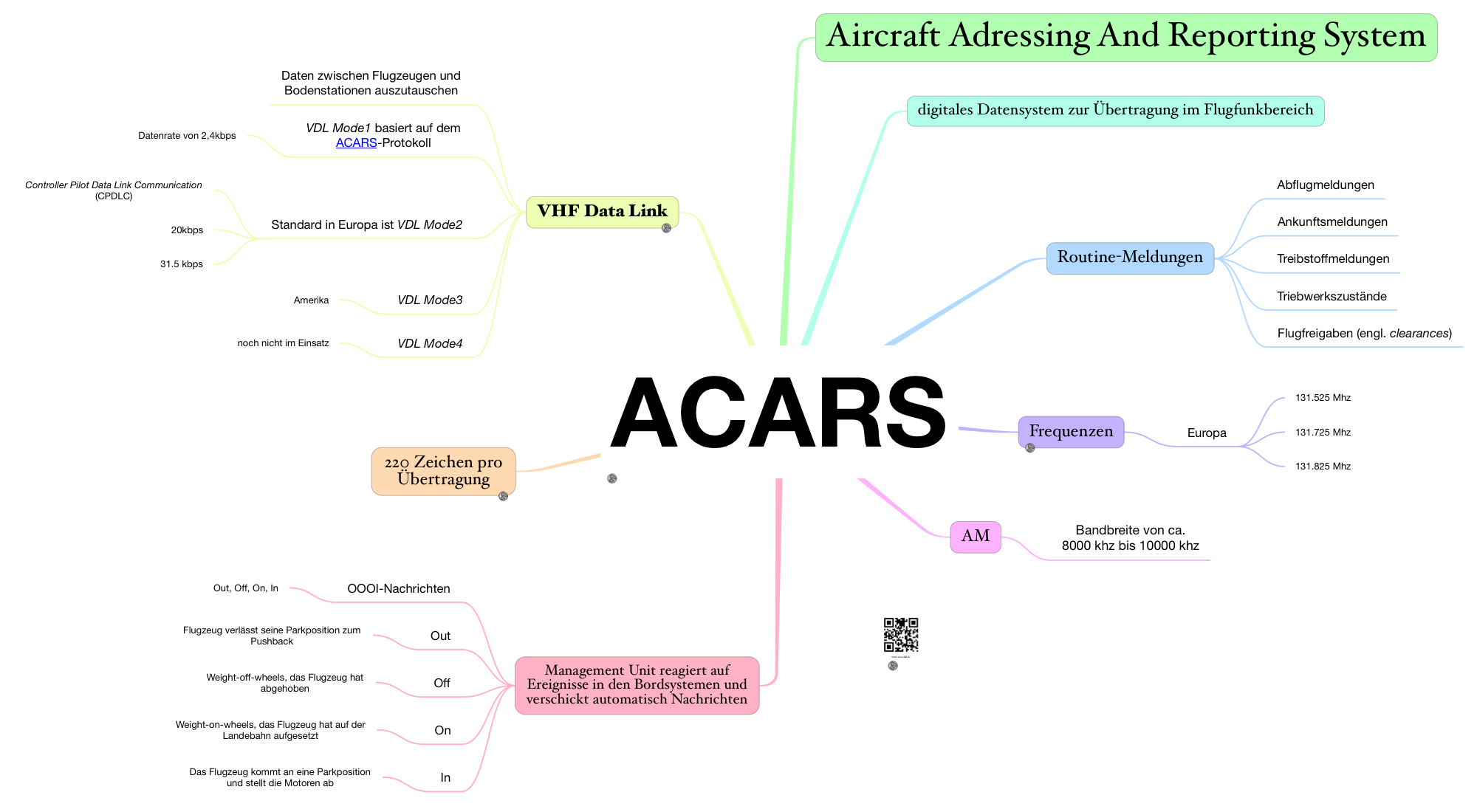
Die Kommunikation im Luftverkehr ist von entscheidender Bedeutung, um die Sicherheit und Effizienz des Flugverkehrs zu gewährleisten. Ein wichtiger Bestandteil dieses Kommunikationssystems sind Transponder, die von Flugzeugen verwendet werden, um sich gegenüber bodengestützten Radaranlagen und anderen Flugzeugen zu identifizieren. Diese Transponder sind in der Lage, auf verschiedene Arten auf Anfragen oder Interrogationen zu reagieren.

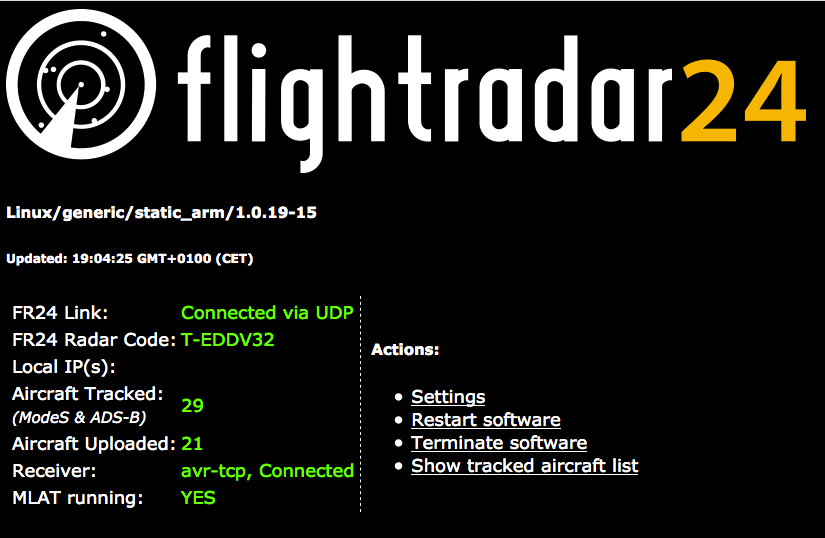
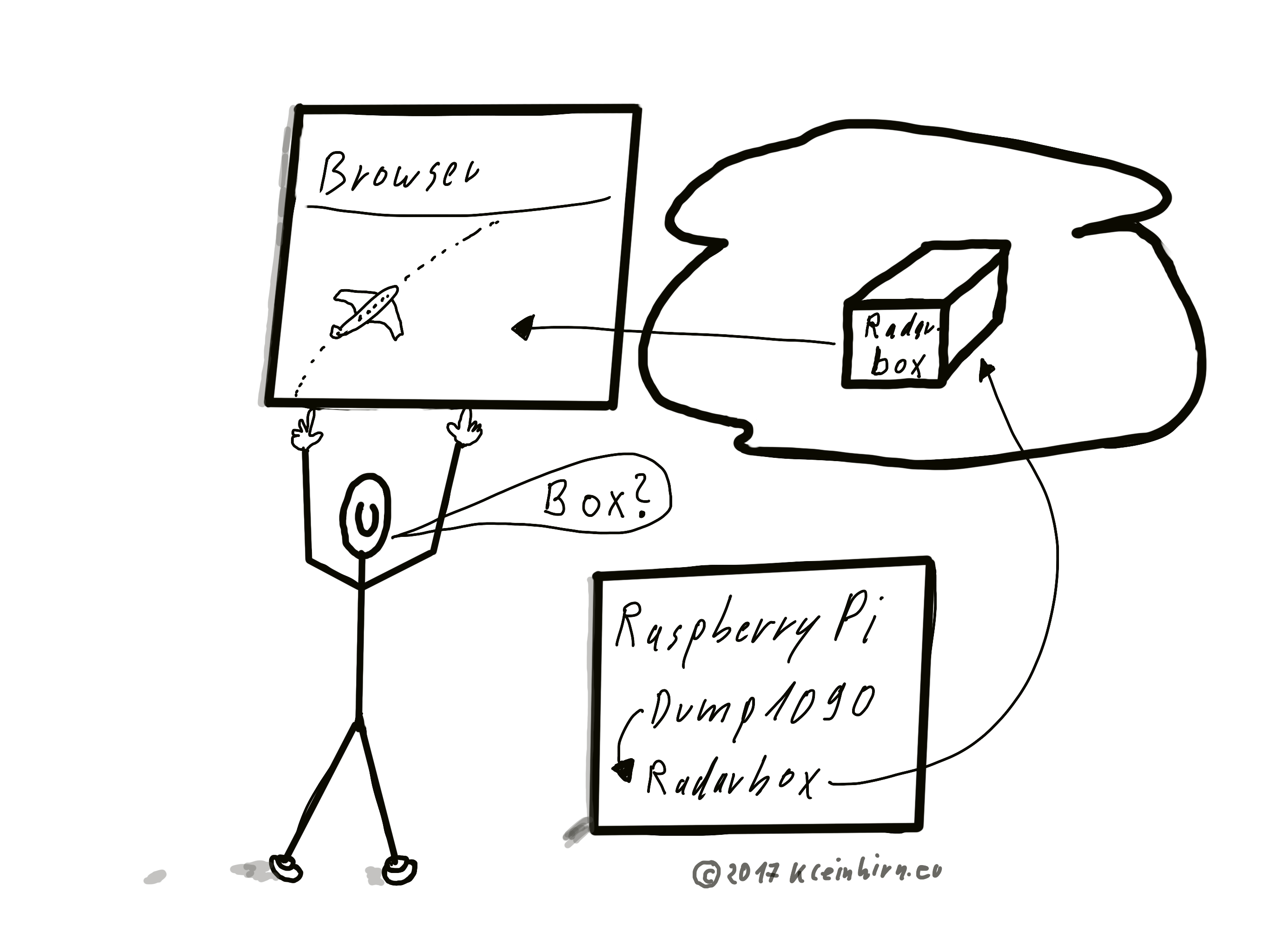
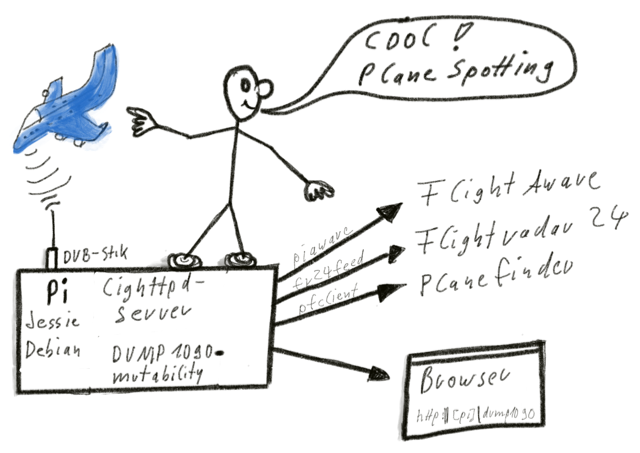
Flugfunktransponder können auf verschiedene Weisen „interrogated“ oder angefragt werden. Die Interrogation erfolgt in der Regel von bodengestützten Radaranlagen, von anderen Flugzeugen oder von Raspberry Pi Empfängern. Je nachdem, wie die Anfrage gestaltet ist, gibt der Transponder unterschiedliche Informationen preis.
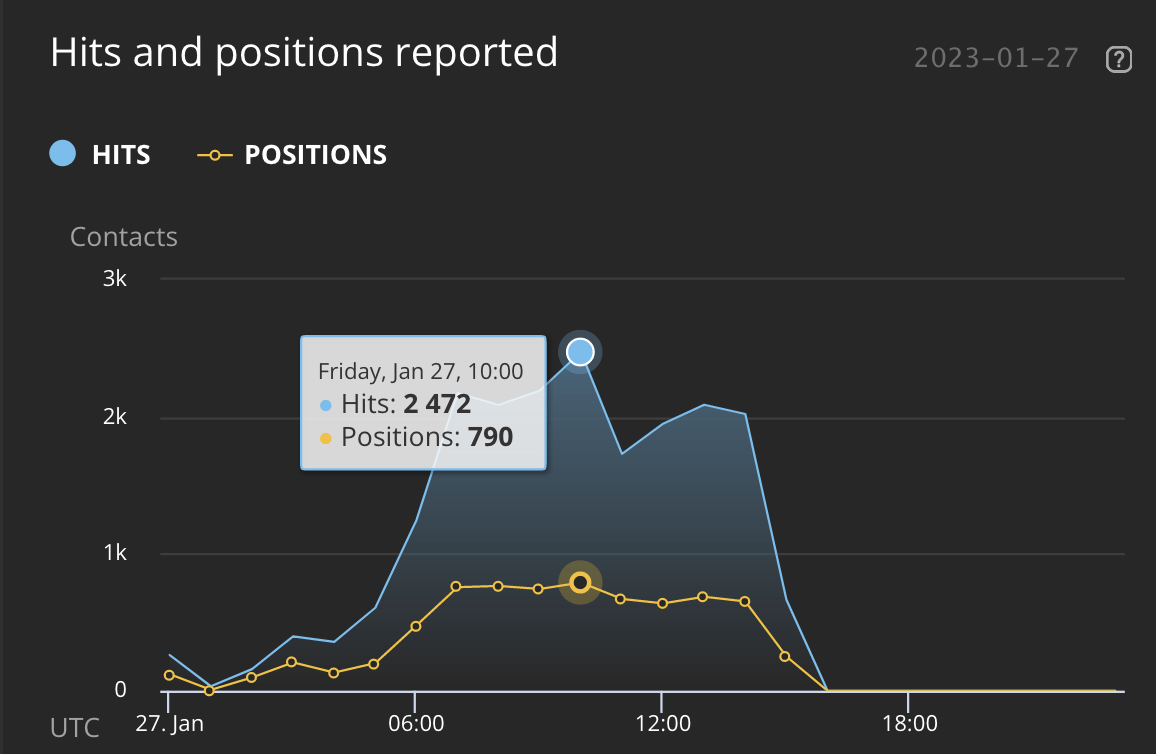
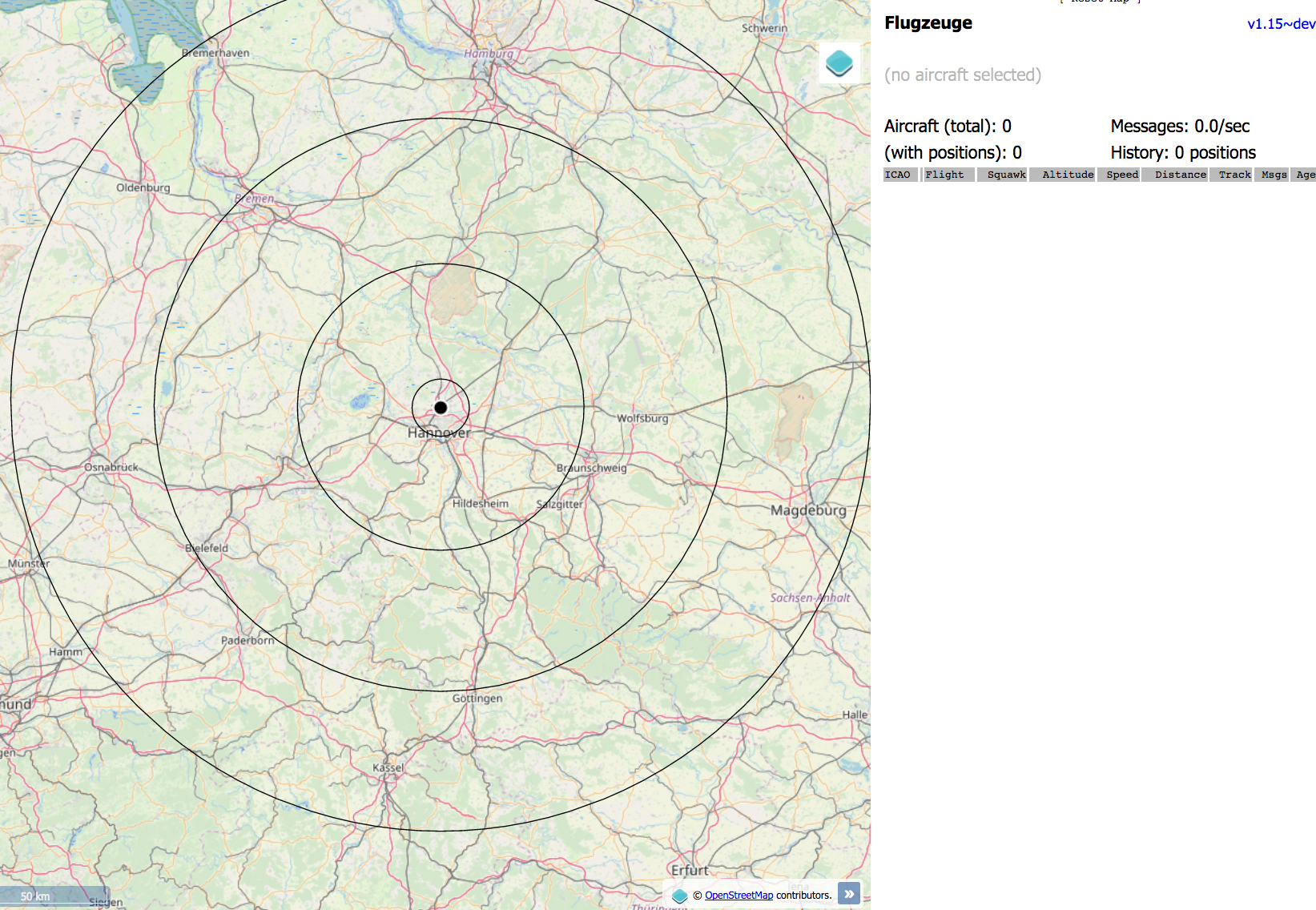
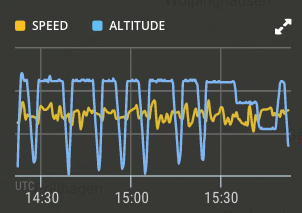
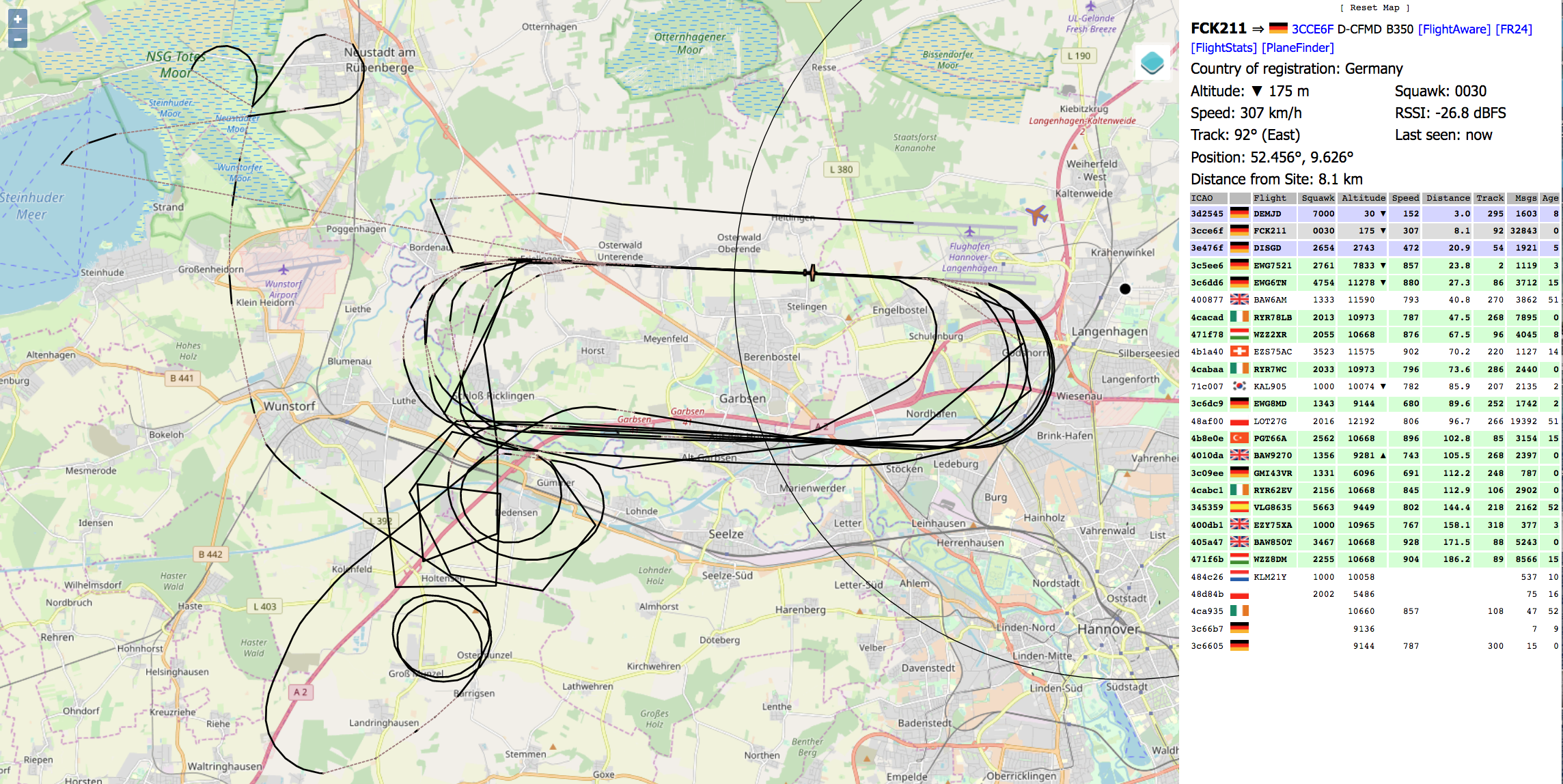
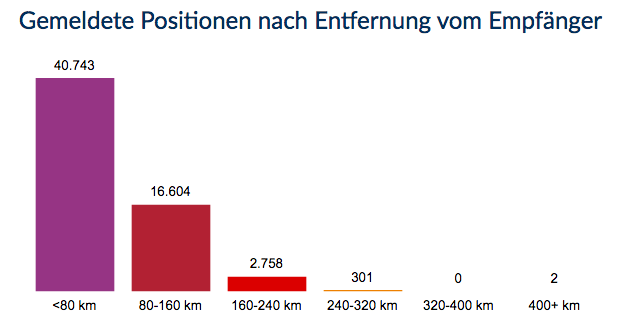
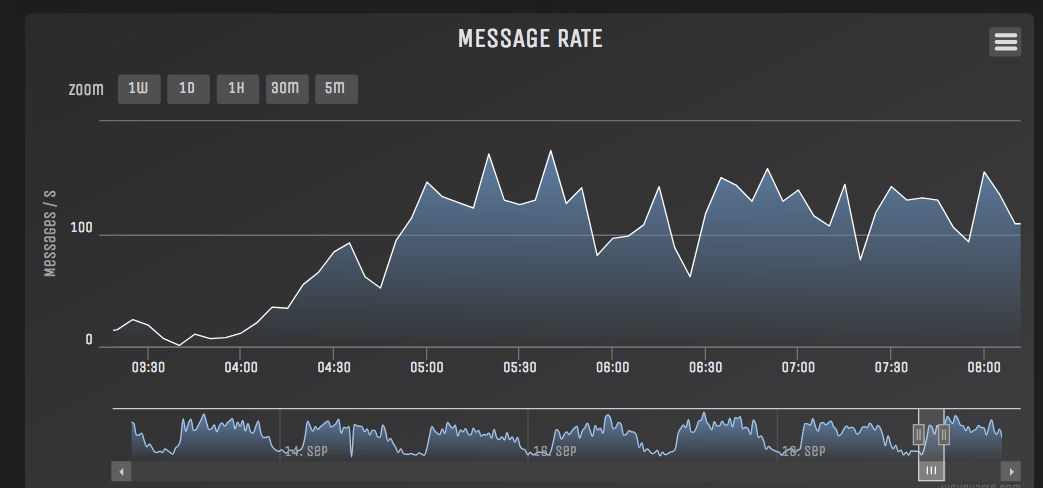
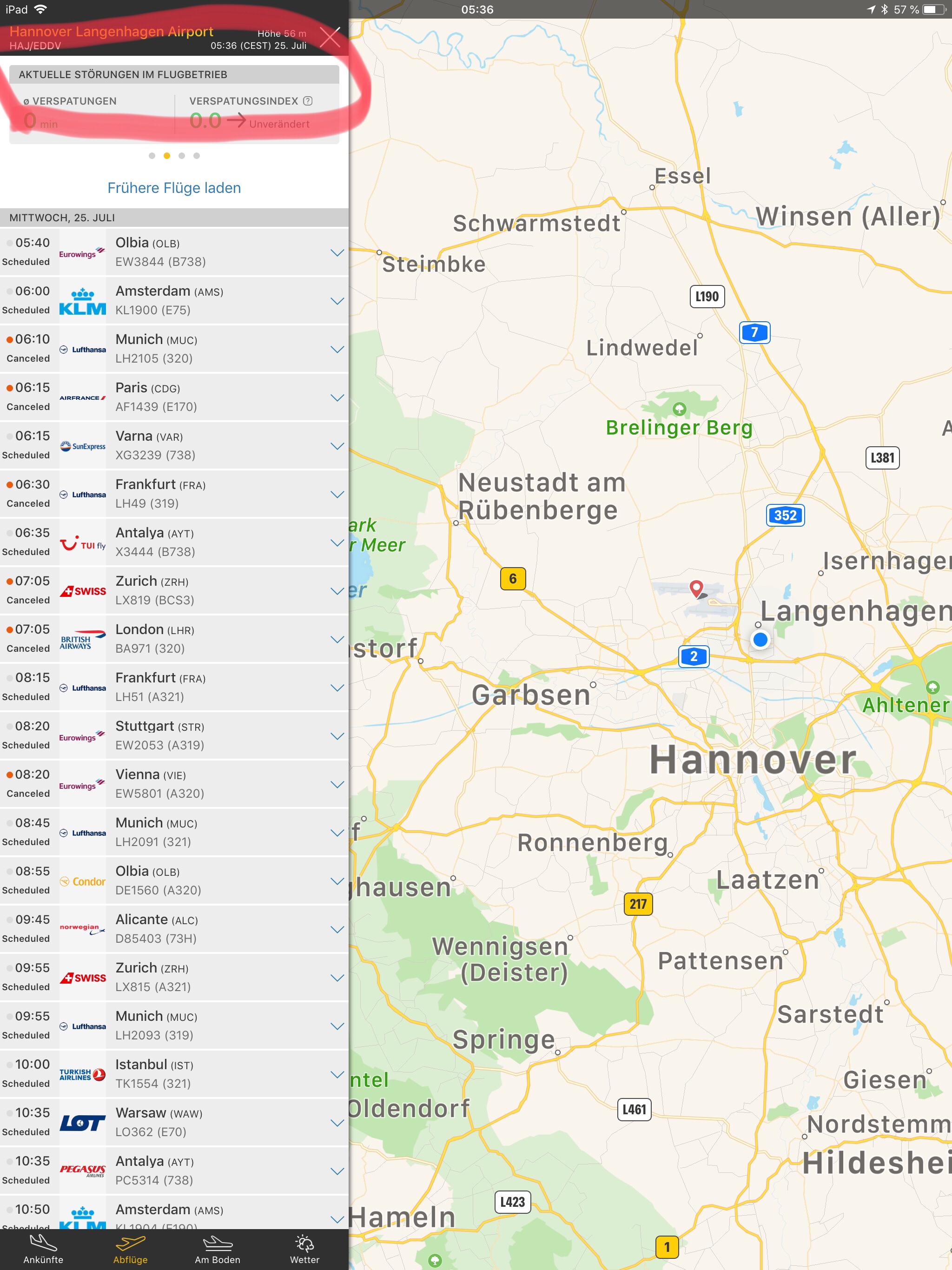
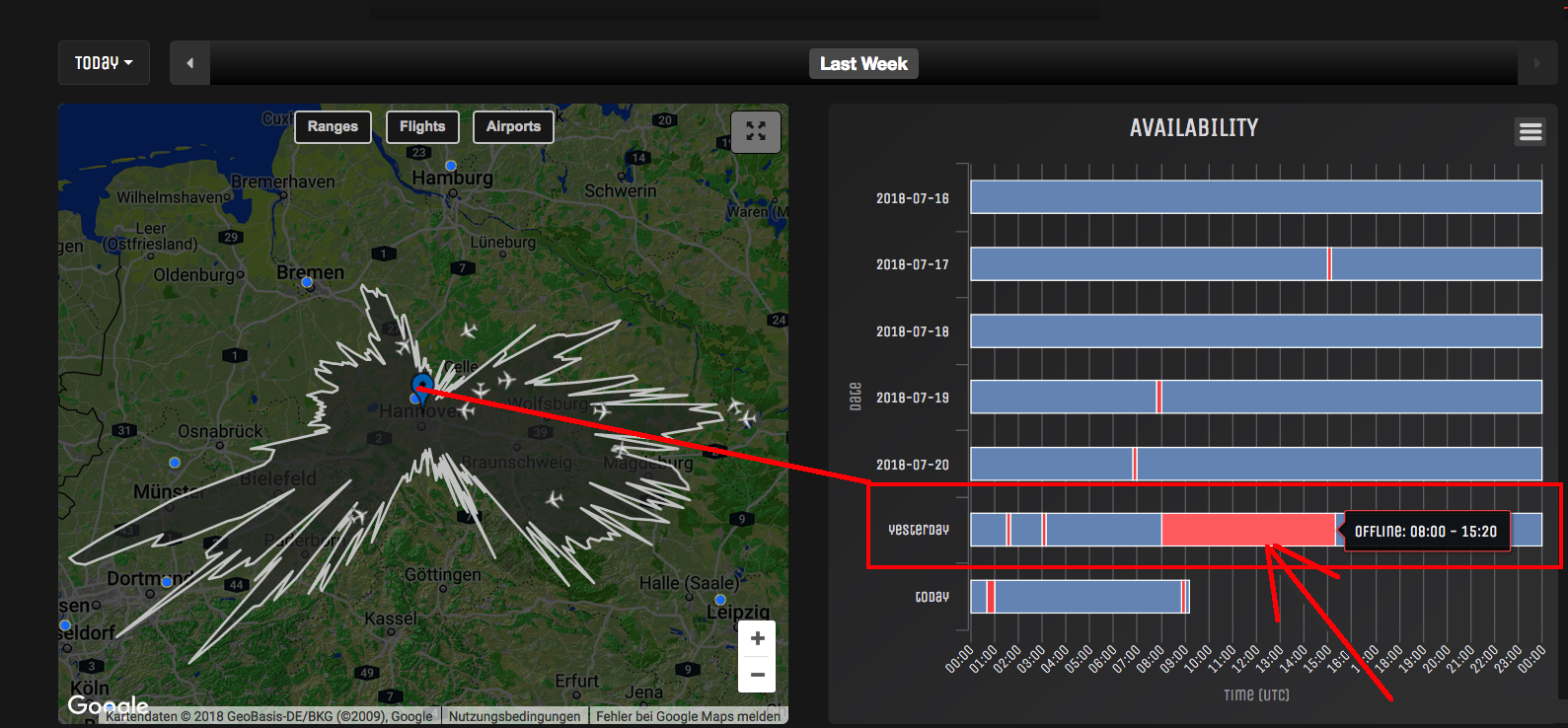
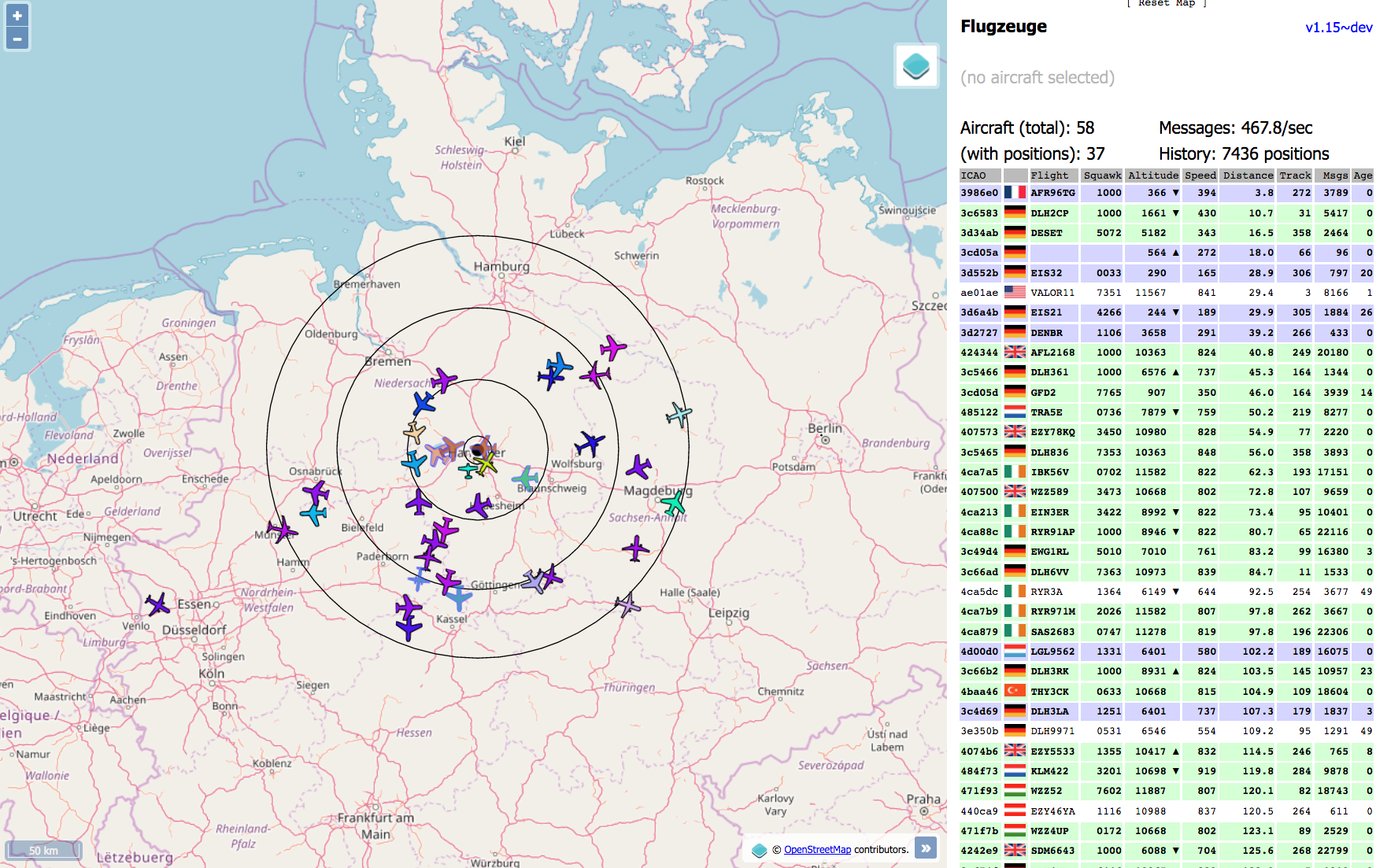
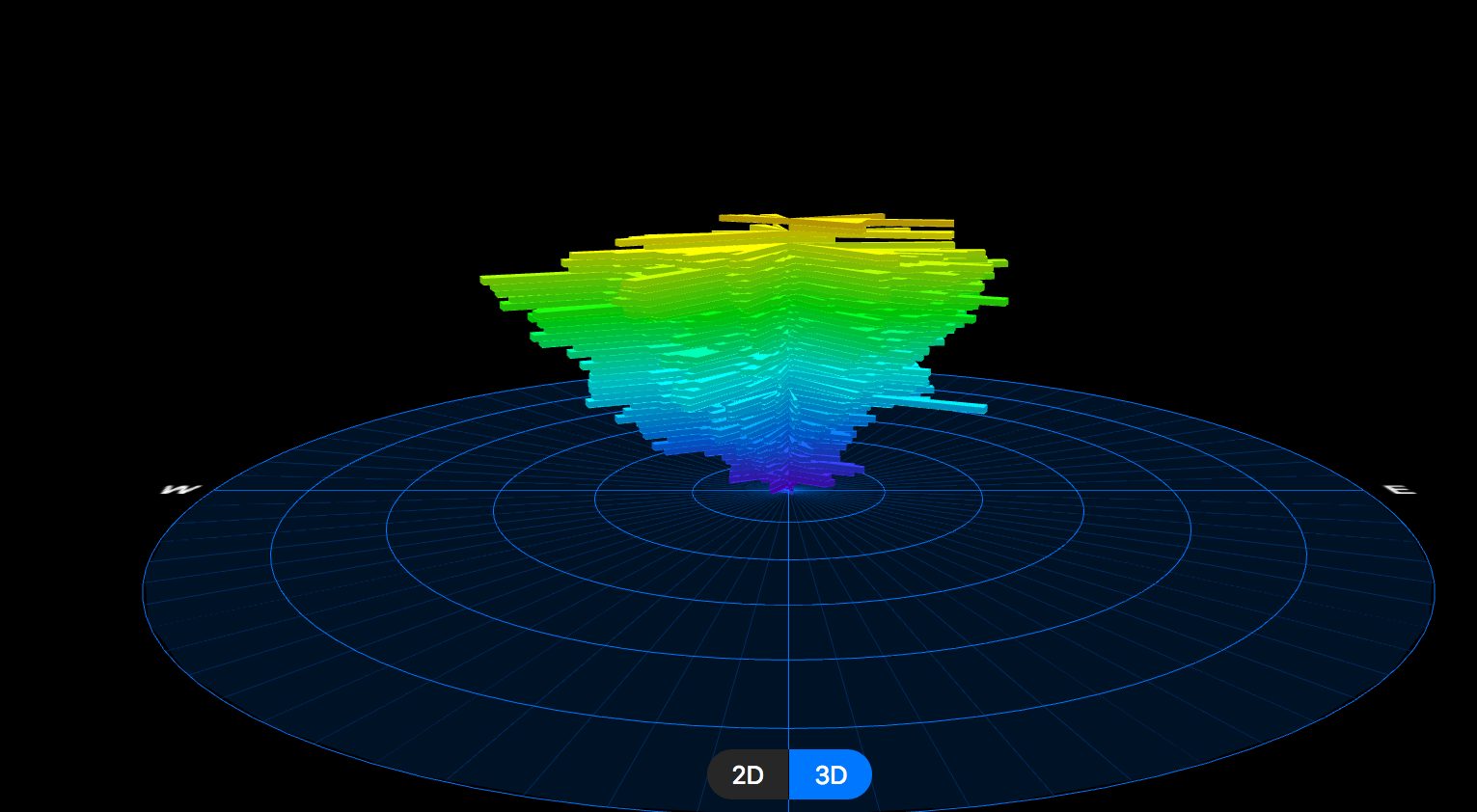
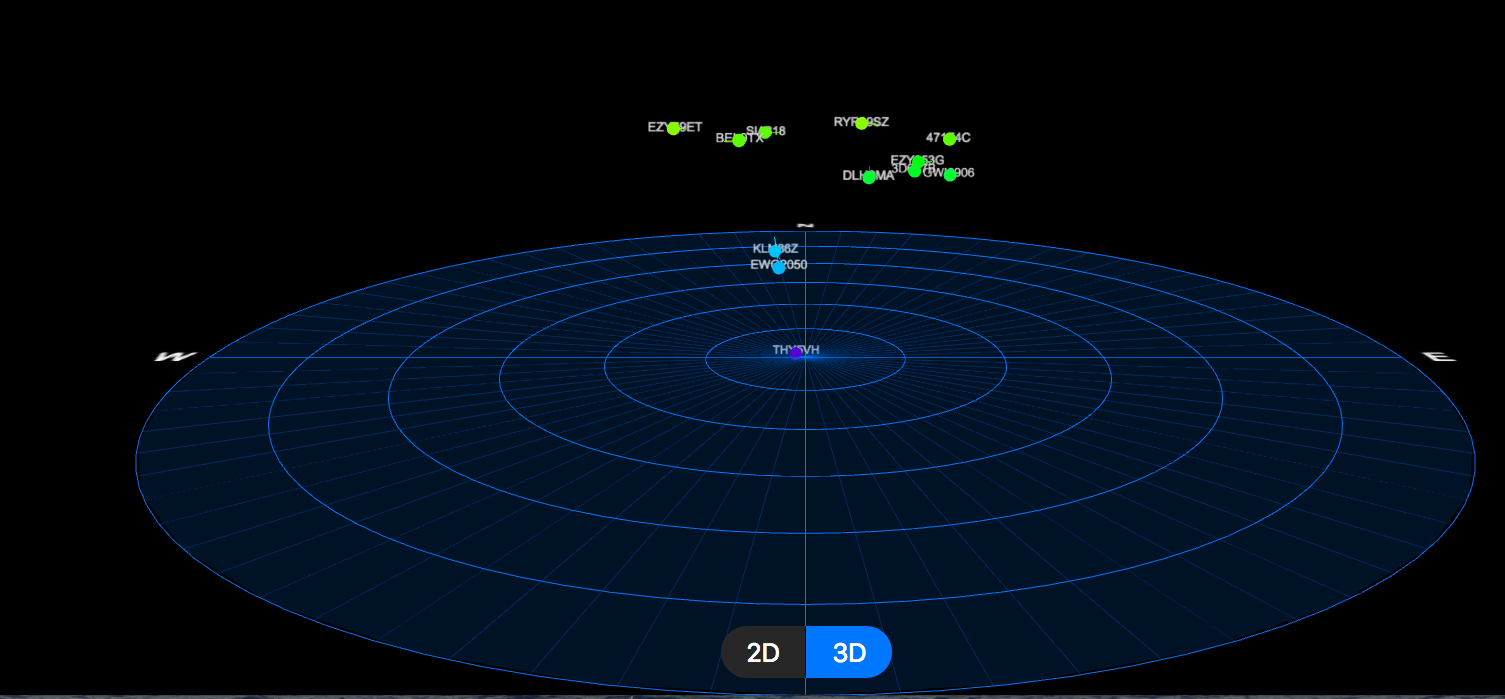
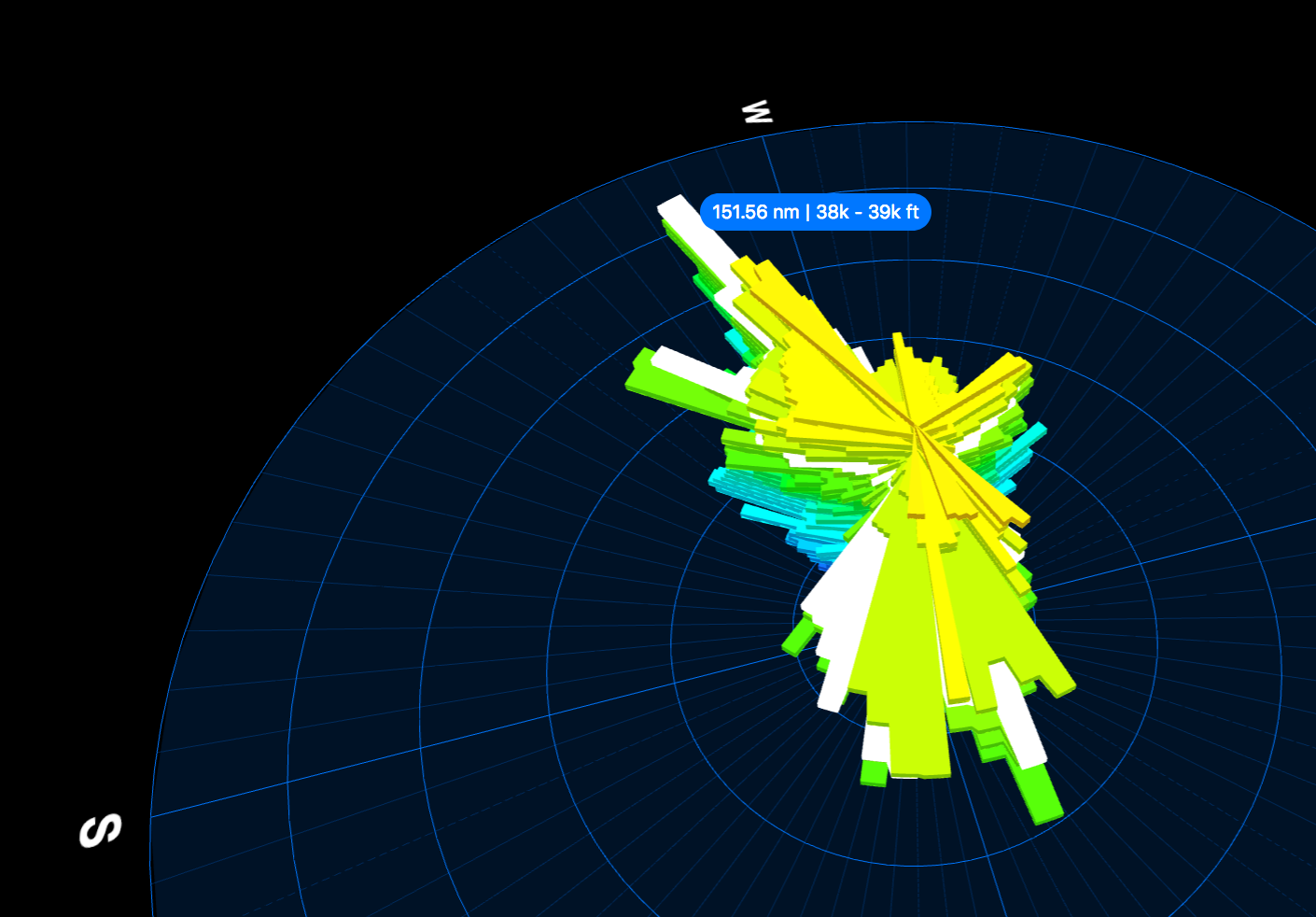
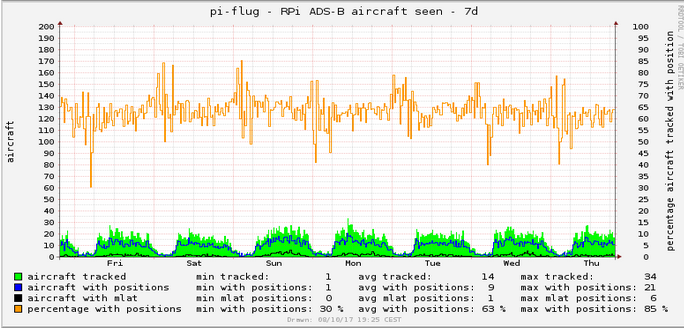
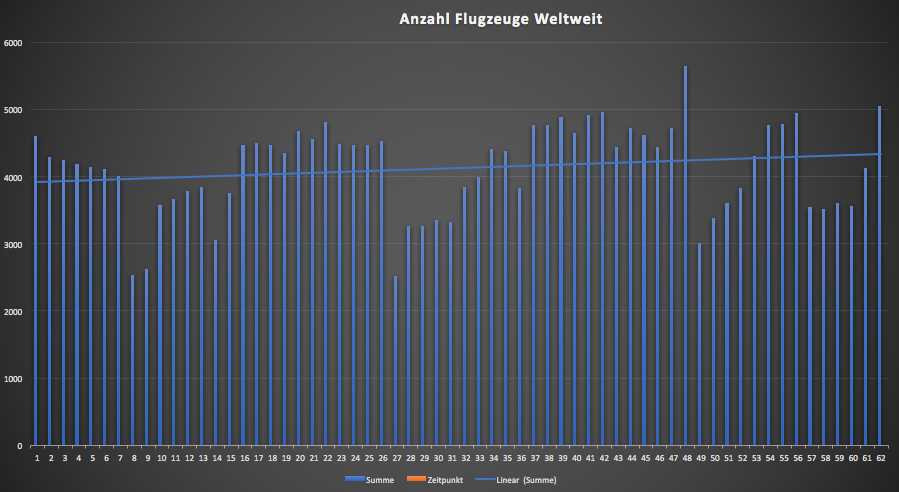
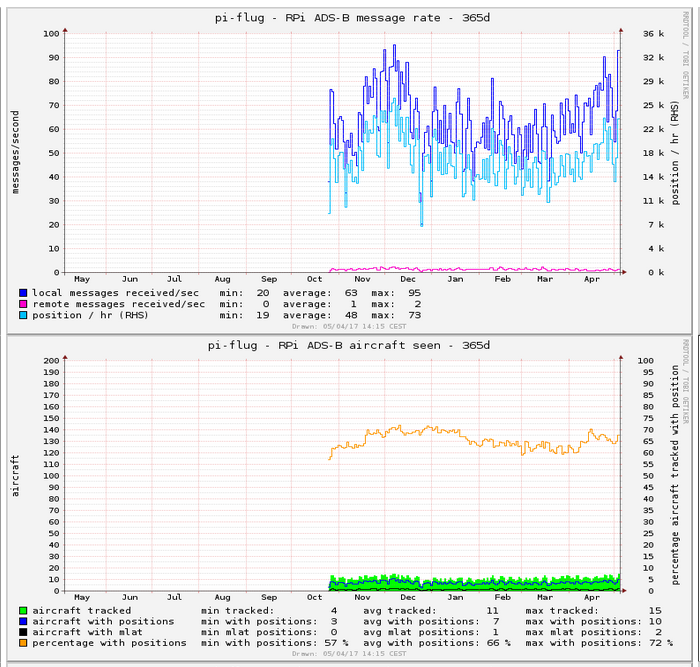
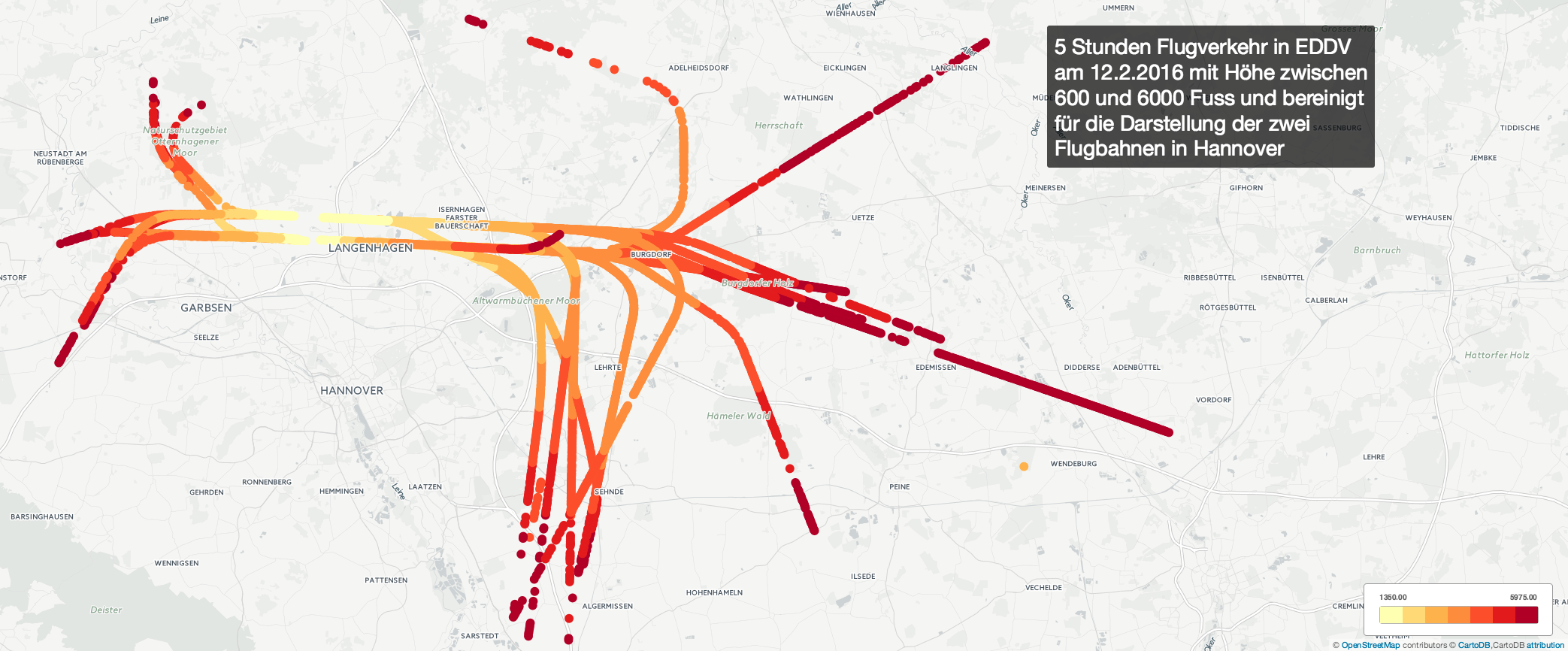
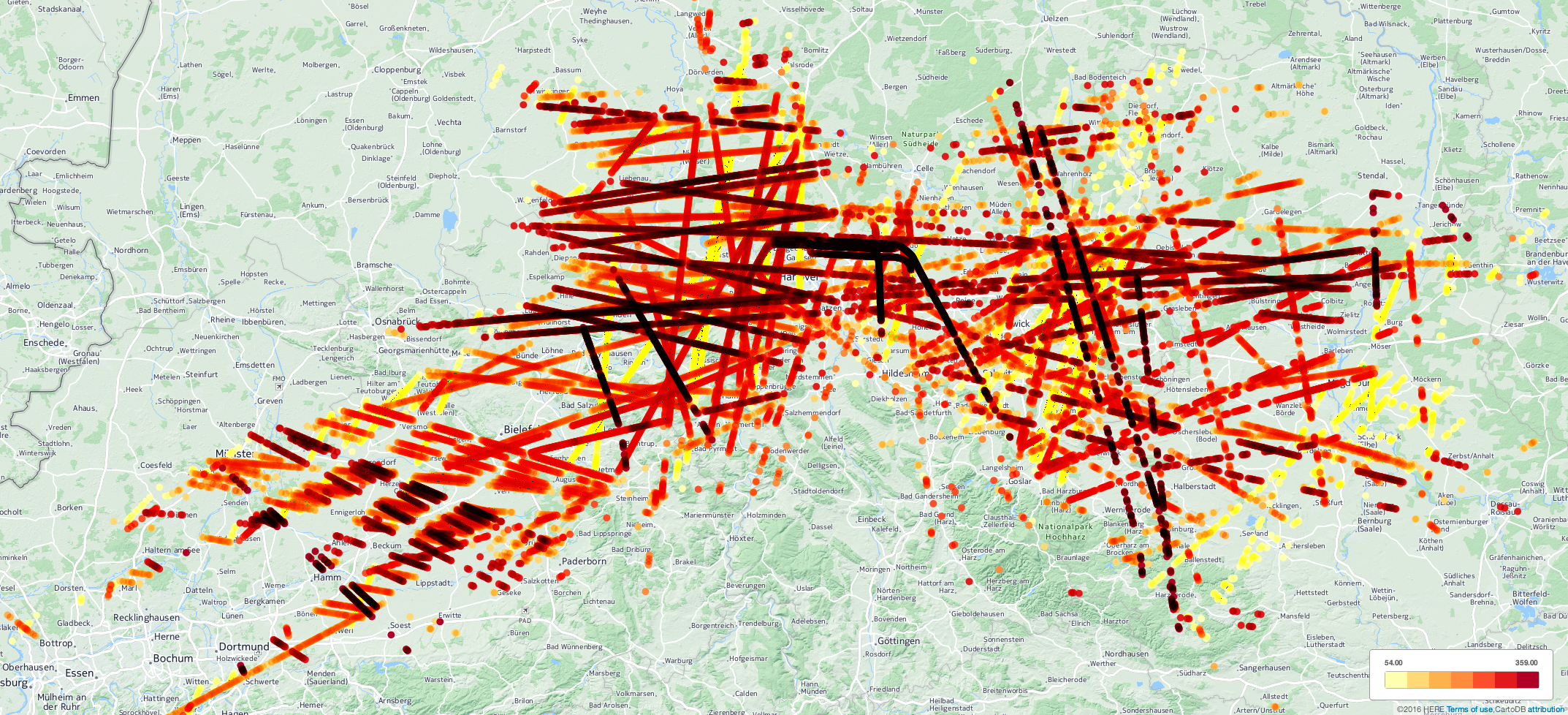
Mode S ist ein modernerer und leistungsfähigerer Modus. Er ermöglicht die Übermittlung einer breiteren Palette von Informationen, einschließlich der Identifikation des Flugzeugs, seiner Höhe, Geschwindigkeit und mehr. Dieser Modus ist besonders nützlich in dichtem Luftraum und für die Verfolgung von Flugzeugen auf Flughäfen. Hier mal die Auswertung der letzten 6 Tage die ich so in Langenhagen (EDDV, HAJ) empfangen habe:
„Anzahl der erfassten Flugzeuge (Mode S) der letzten 6 Tage von einem Raspberry Pi Zero W“ weiterlesen