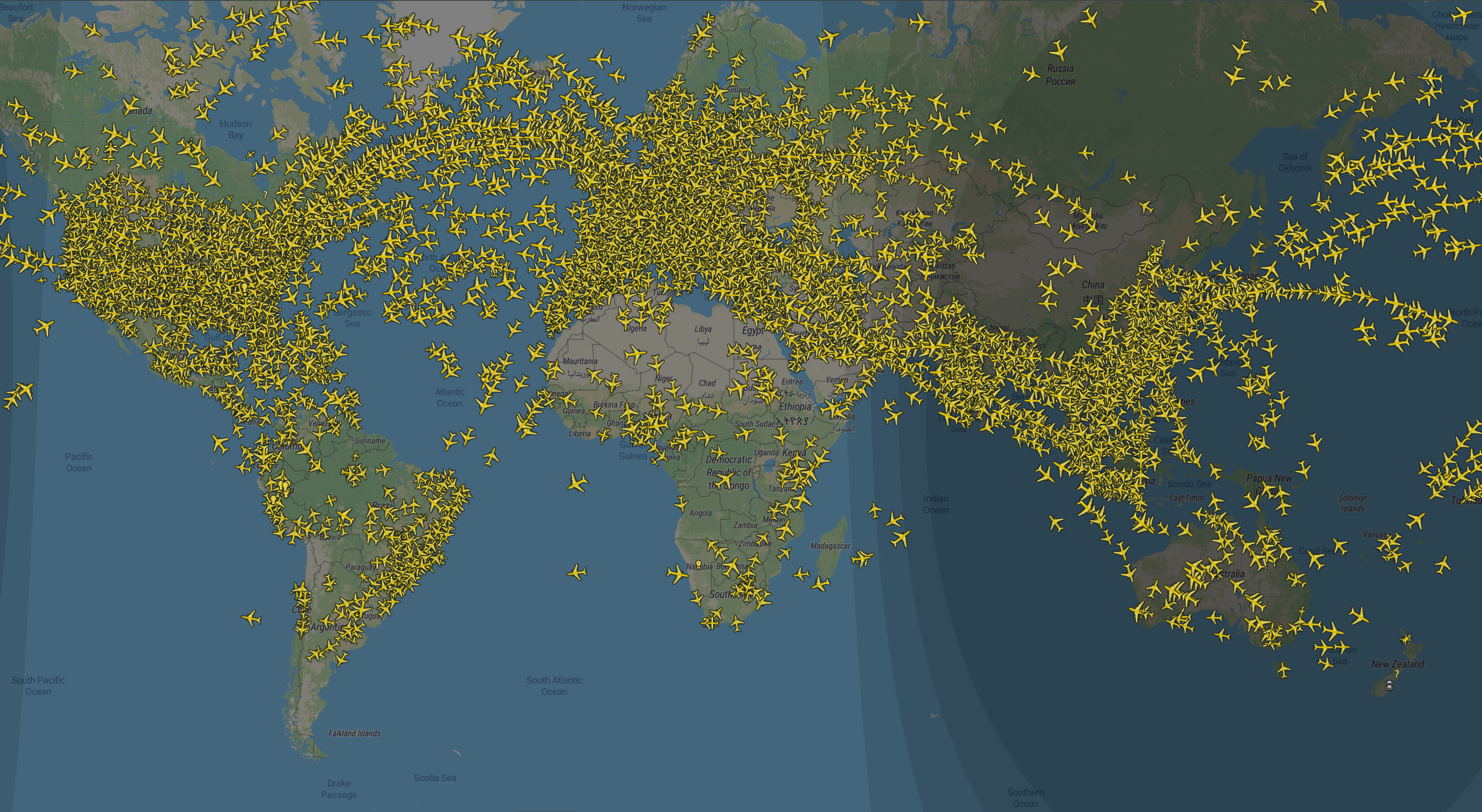
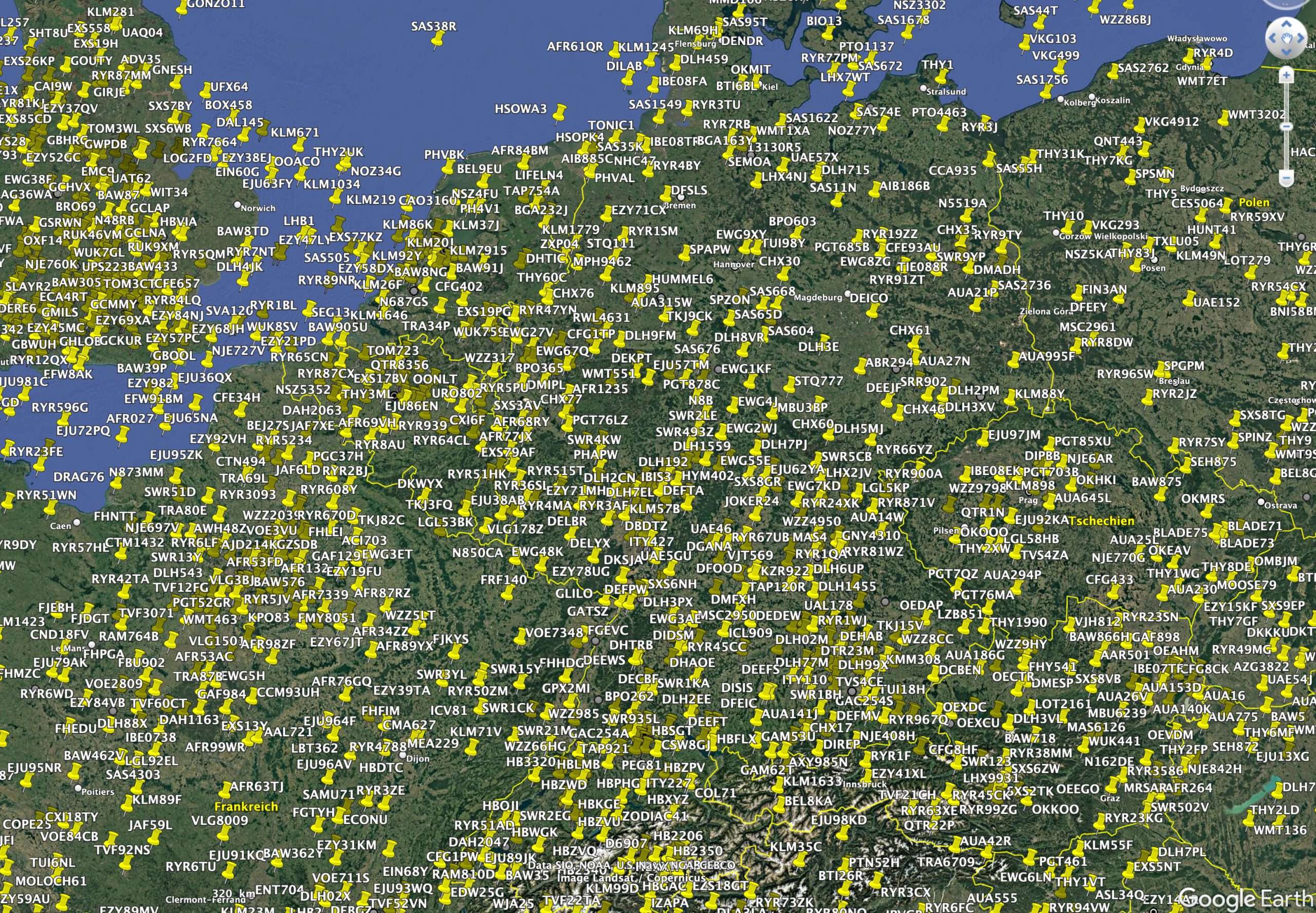
Mit dem neuen Button „KML Export“ in der FlugMonitor-Anwendung lassen sich die Echtzeit-Daten aller aktuell von OpenSky erfassten Flugzeuge weltweit in eine KML-Datei exportieren. KML steht für „Keyhole Markup Language“ – ein XML-basiertes Dateiformat, das von Google Earth, Google Maps, QGIS und vielen anderen Kartenprogrammen direkt geöffnet werden kann. Hier mal eine Ansicht in Google Earth:
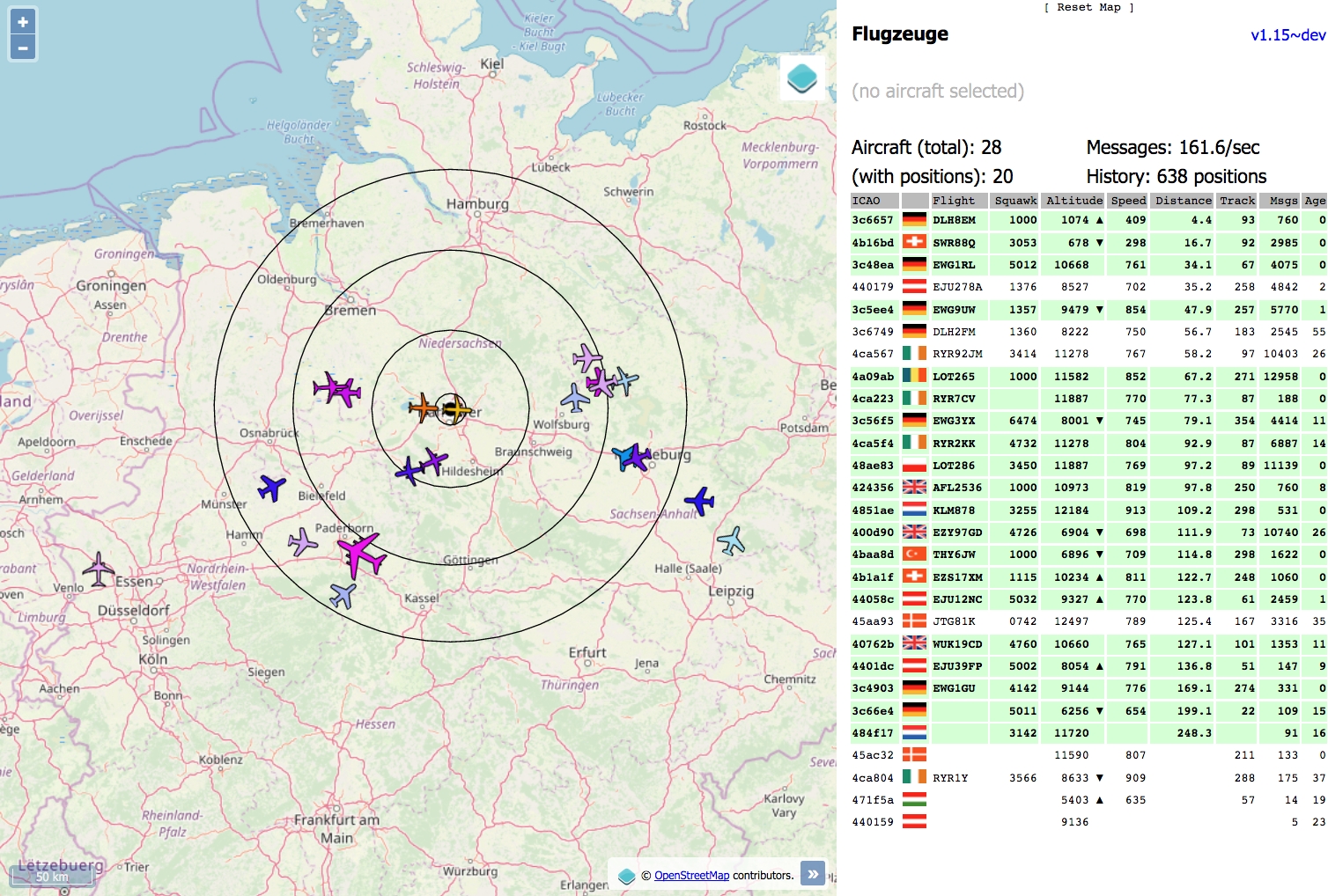
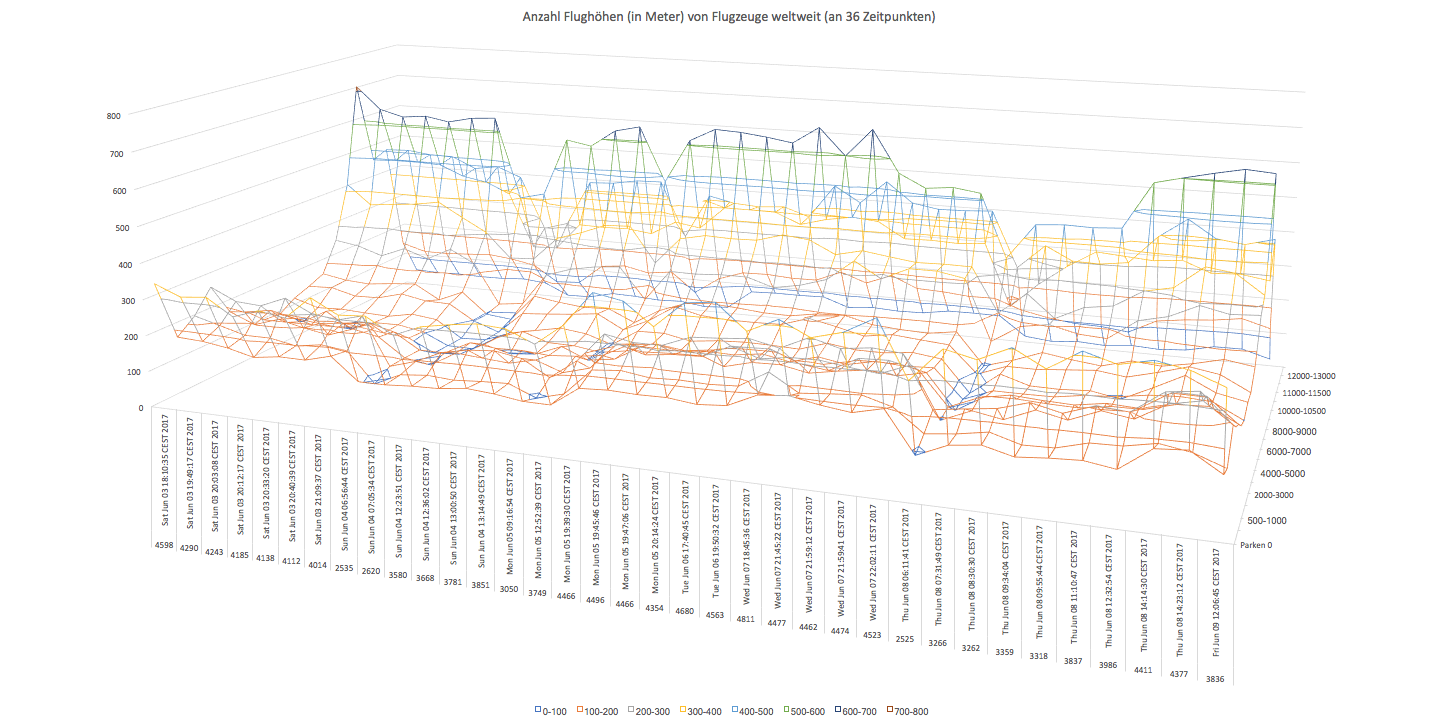
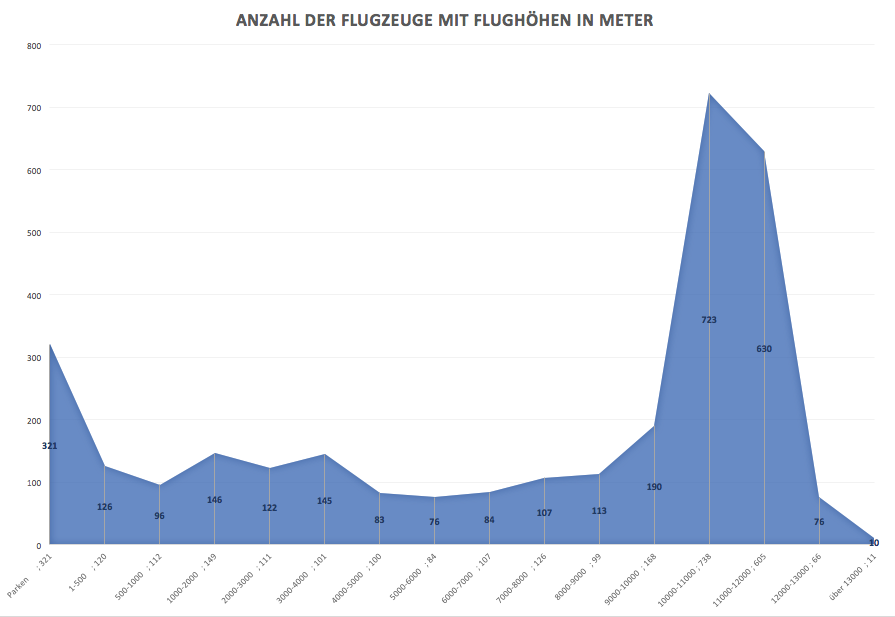
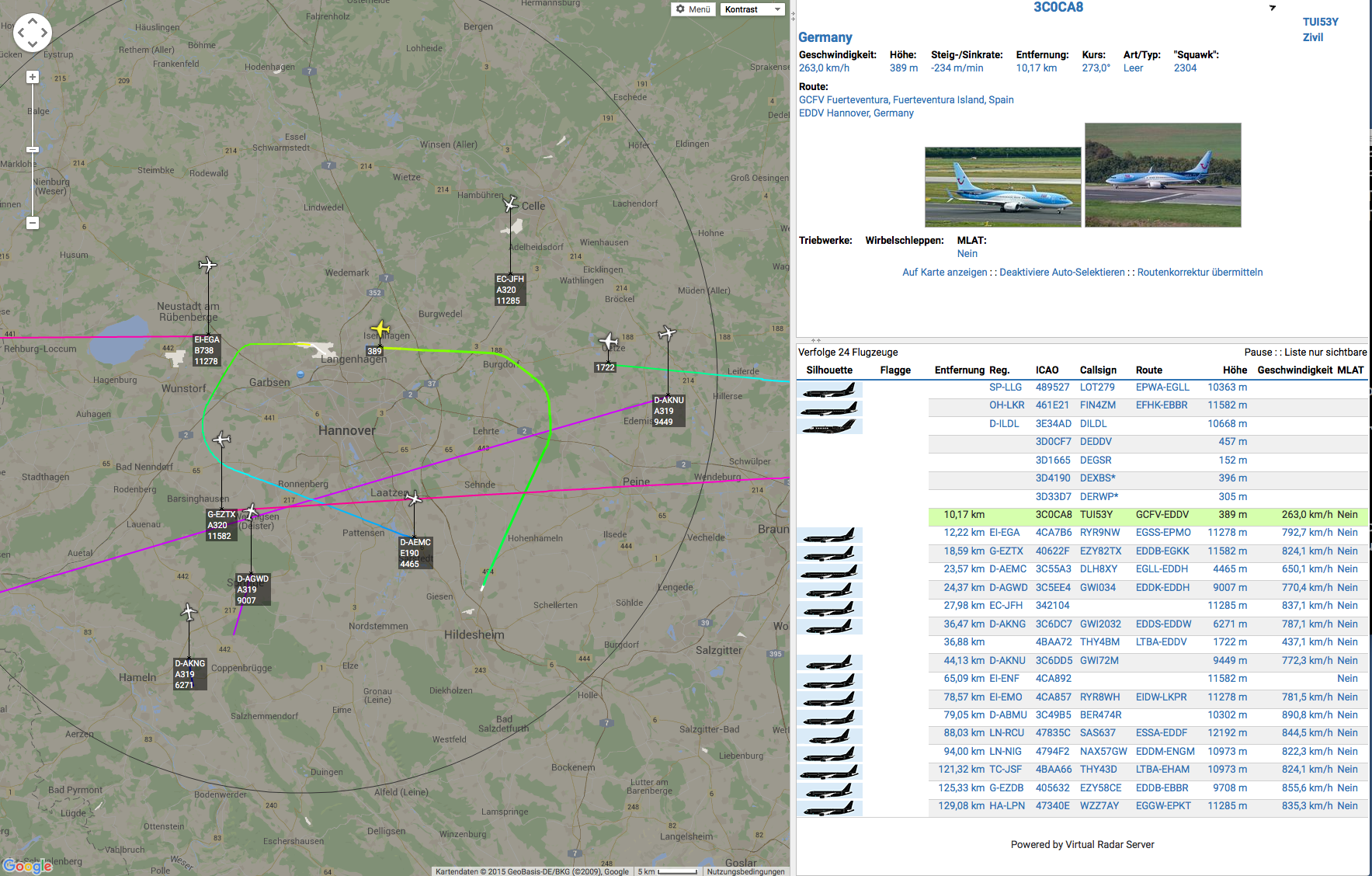
Der KML-Export ergänzt den FlugMonitor um eine leistungsfähige Archiv- und Analysefunktion. Aus den 17 Feldern eines einzelnen StateVectors lässt sich ein vollständiges Lagebild jedes Flugzeugs rekonstruieren: wo es ist, in welche Richtung es fliegt, wie schnell, wie hoch, wem es gehört und wie verlässlich die Daten sind. Multipliziert mit tausenden Flugzeugen gleichzeitig entsteht ein präziser Schnappschuss des globalen Luftverkehrs – zu jedem beliebigen Zeitpunkt.
„KML-Export: Globale Flugzeugdaten speichern und auswerten“ weiterlesen
 Dies geht mit dem Aufruf:
Dies geht mit dem Aufruf: