Für dump1090-mutability gibt es bis jetzt noch kein Release, das auch MLAT anzeigen kann.
Multilateration oder kurz MLAT errechnet die Position eines Flugzeuges anhand seiner ModeS-Daten. Dazu sind mindestens vier MLAT-fähige Bodenstationen in einem Gebiet von etwa 250 km Radius nötig, um entsprechend qualitative Positionsdaten mit einer Abweichung unter 100 Metern zu liefern. Mit MLAT können nur Flüge über eine Flughöhe von 10.000 ft dargestellt werden, für die Flugbereiche darunter würde ein engmaschiges Netz von mind. vier MLAT-Empfangsstationen benötigt, um eine möglichst Abdeckung erreichen zu können.
Damit auch MLAT Flugzeuge angezeigt werden können, muss aus den aktuellsten Sourcen ein Install-Package erzeugt und installiert werden. Das geht in einer halben Stunde wie folgt:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 |
# Hilfs Package installieren sudo apt-get install librtlsdr-dev libusb-1.0-0-dev pkg-config debhelper git-core # Libs landen und installieren wget https://github.com/mutability/librtlsdr/releases/download/v0.5.4_git-1/librtlsdr0_0.5.4.git-1_armhf.deb wget https://github.com/mutability/librtlsdr/releases/download/v0.5.4_git-1/librtlsdr-dev_0.5.4.git-1_armhf.deb sudo dpkg -i librtlsdr0_0.5.4.git-1_armhf.deb sudo dpkg -i librtlsdr-dev_0.5.4.git-1_armhf.deb # Verzeichnis erstellen und in das Verzeichnis wechseln mkdir neue-dev-version cd neue-dev-version/ # Aktuellen Entwicklungsstand holen git clone https://github.com/mutability/dump1090.git # in das Dump1090 Verzeichnis gehen cd dump1090 # Package bauen, das dauert ein paar Minuten (ca. 10) dpkg-buildpackage -b # in das Verzeichnis mit dem neuen Package wechseln und das erzeugt Package installieren cd .. sudo dpkg -i dump1090-mutability_1.15~dev_armhf.deb |
Das Ergebnis sieht wie folgt aus:
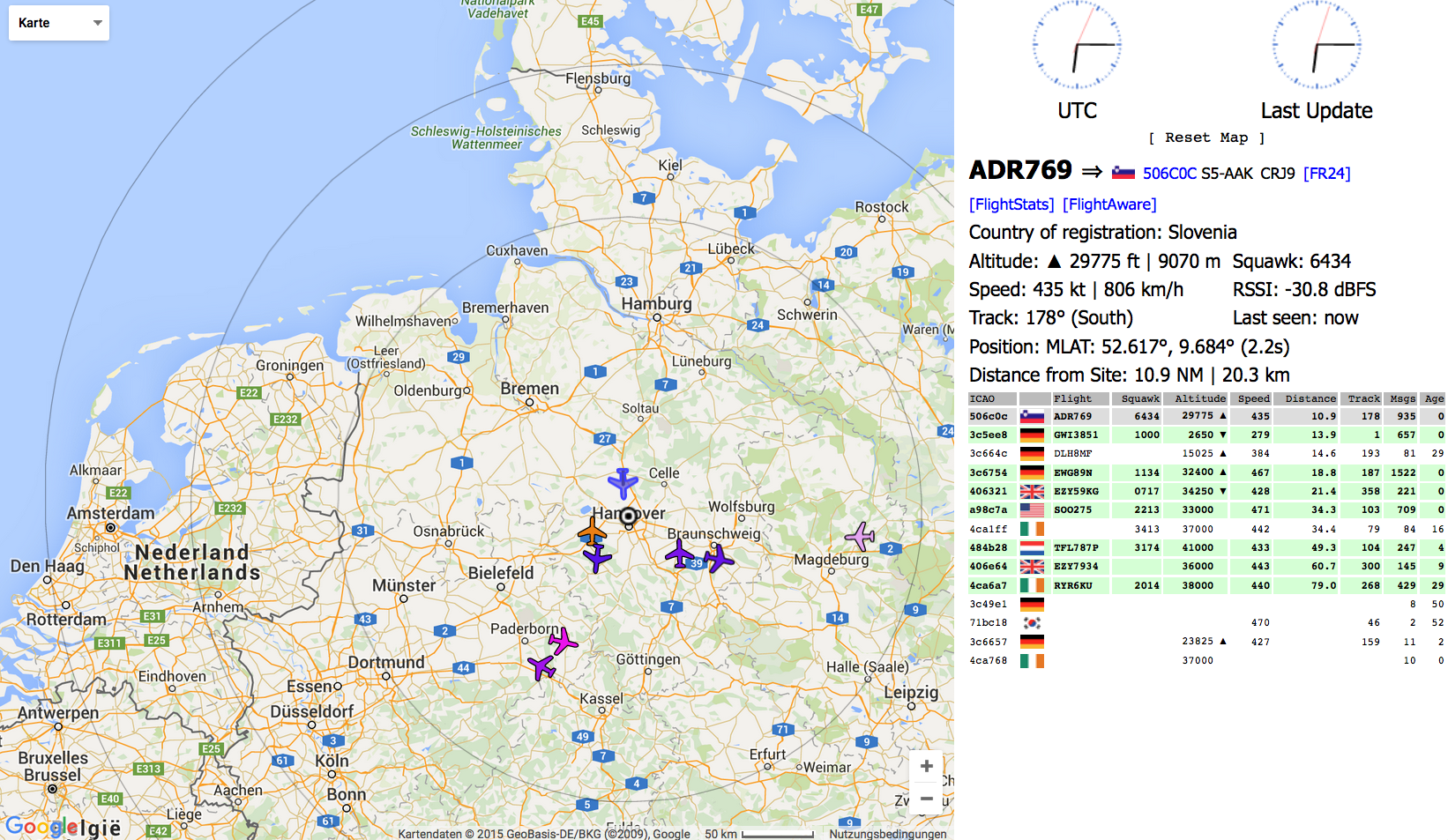
Oben rechts wird nun die neue Version angezeigt. Neu sind auch die angezeigten Flaggen und es werden jetzt auch alle Flugzeuge in der Tabelle und in der Karte lila angezeigt die keinen Transponder haben und per MLAT bestimmt werden.
Cool, ich bin begeistert!
Will man nun zukünftig die Version updaten, braucht man nur folgendes ausführen:
|
1 2 3 4 5 6 |
# eine neue Version holen in dem Verzeichnis git pull sudo dpkg-buildpackage -b cd .. # evl. Vers. Nr. anpassen sudo dpkg -i dump1090-mutability_1.15~dev_armhf.deb |
Die Liste der jeweiligen Änderungen gibt es in den Github issues.