HAJ-Spotter: Air Force One (AFO) mit B.O.B kommt 24.4.2016 nach EDDV (Langenhagen)
Landet die Air Force One (AFO) in Hannover? Die HAZ und auch das HAJ-Spotter-Forum geben Hinweise. Wenn sie aus Isernhagen anfliegt, kann ich sie von der Terrasse sehen 🙂
Das wird wohl nichts, wie dieser Beitrag der NDR zeigt.

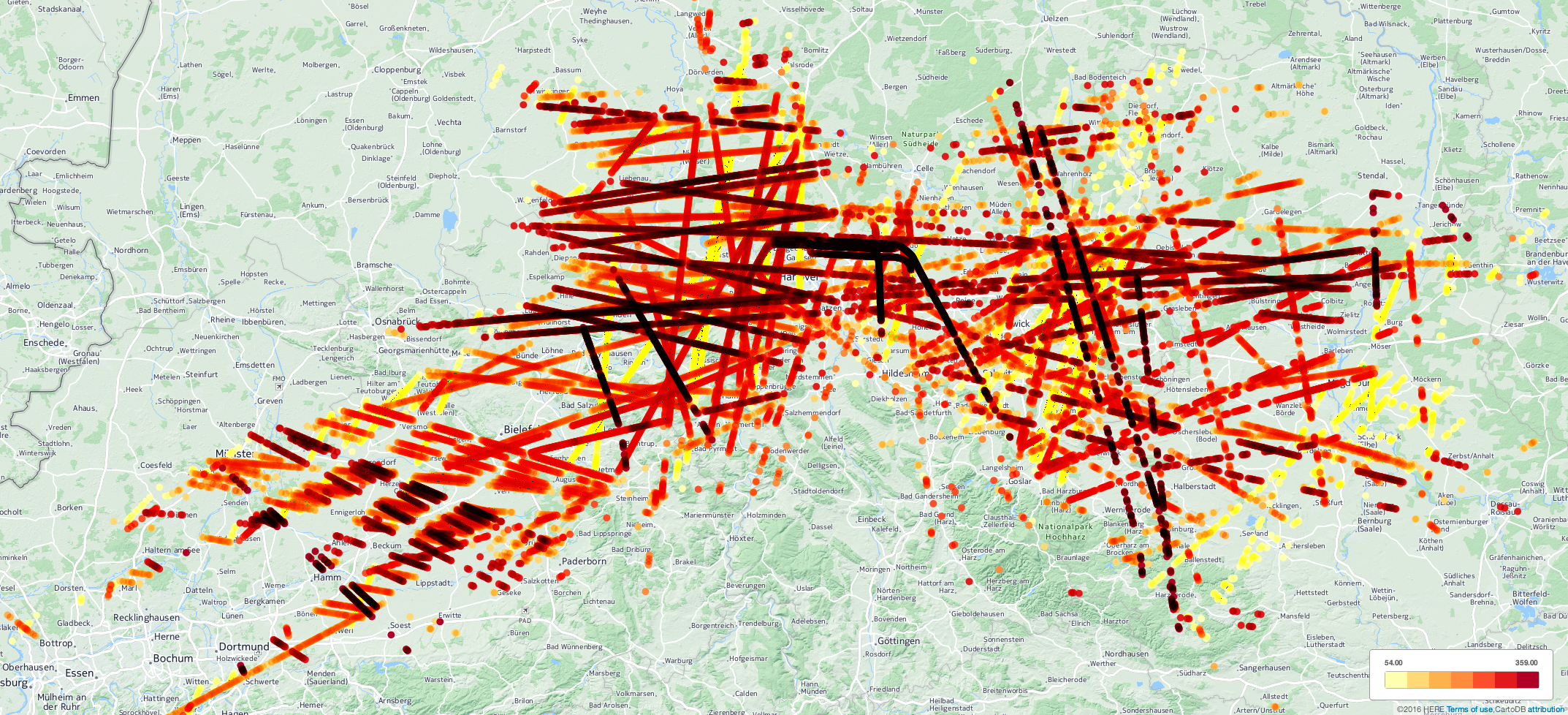
Aber egal von welcher Richtung die Boeing 747-200B die Air Force One kommt, die Transponderdaten können jederzeit von mir empfangen werden, mein Raspberry Pi läuft. Hier mal die Abdeckung von gestern:
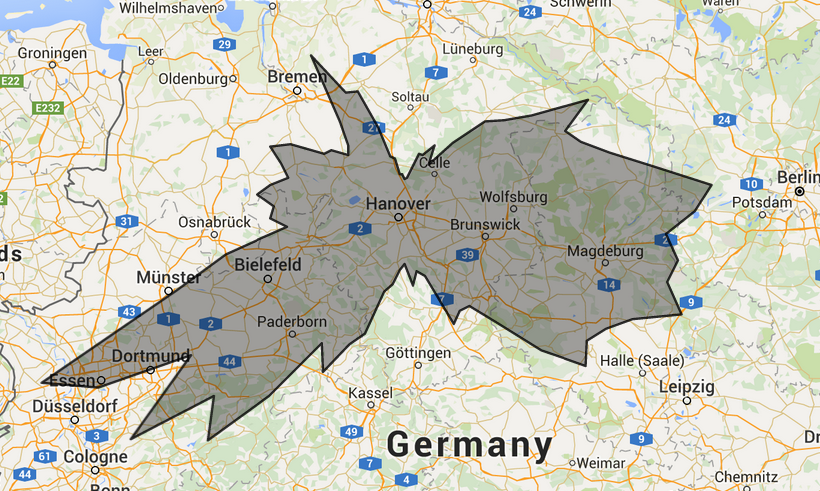 Ob die aus Sicherheitsgründen die Transponder auschalten?
Ob die aus Sicherheitsgründen die Transponder auschalten?
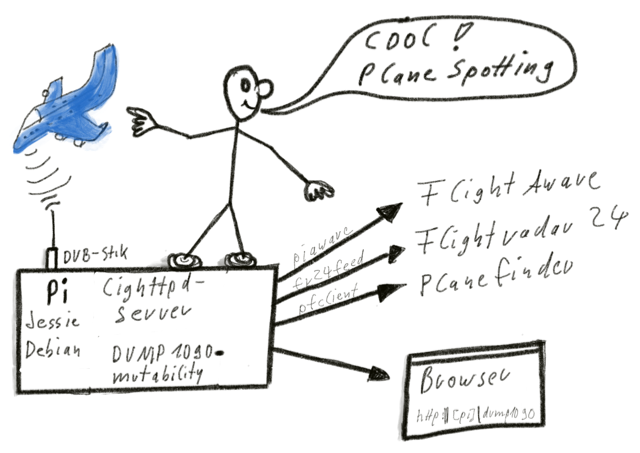
Aktuellste Debian Jessie: Wie wird DUMP1090-mutability mit Feeds für Planefinder, Flightaware, Flightradar24 und RadarBox24 in 60 Min erstellt?
Vor einiger Zeit hatte ich schon mal beschrieben wie man die Flugzeugsignale (Transponder) mit dem Raspberry Pi empfängt und nach Flightradar24.com, de.FlightAware.com und Planefinder.net gleichzeitig senden kann. In der Zwischenzeit gibt es Debian mit der Version Jessie und einige neue Versionen der Feed-Software. Hier nun eine Anleitung wie in ca. 1 Stunde alles auf einem Raspberry Pi installiert werden kann. Zuerst einmal ein Architektur Überblick:
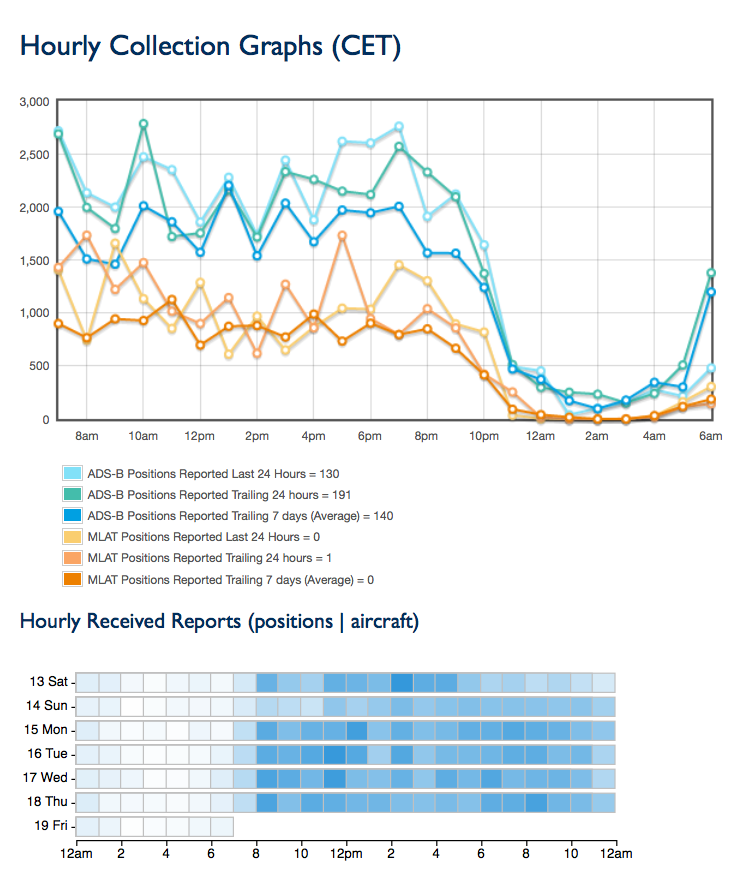
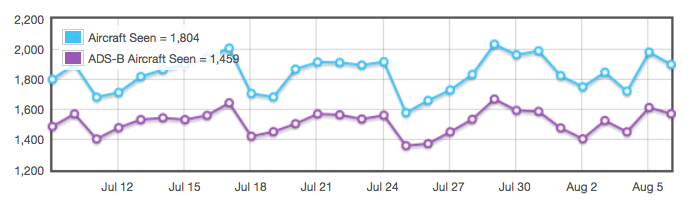
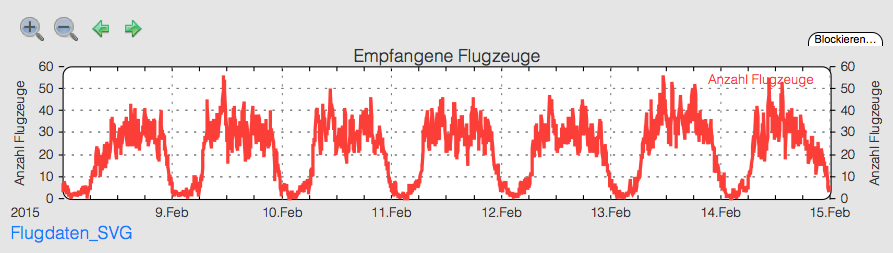
Stündlicher übertragungs Report von Positionen und Flugzeugen der letzen Woche via Raspberry Pi und Dump1090 aus Hannover (EDDV)
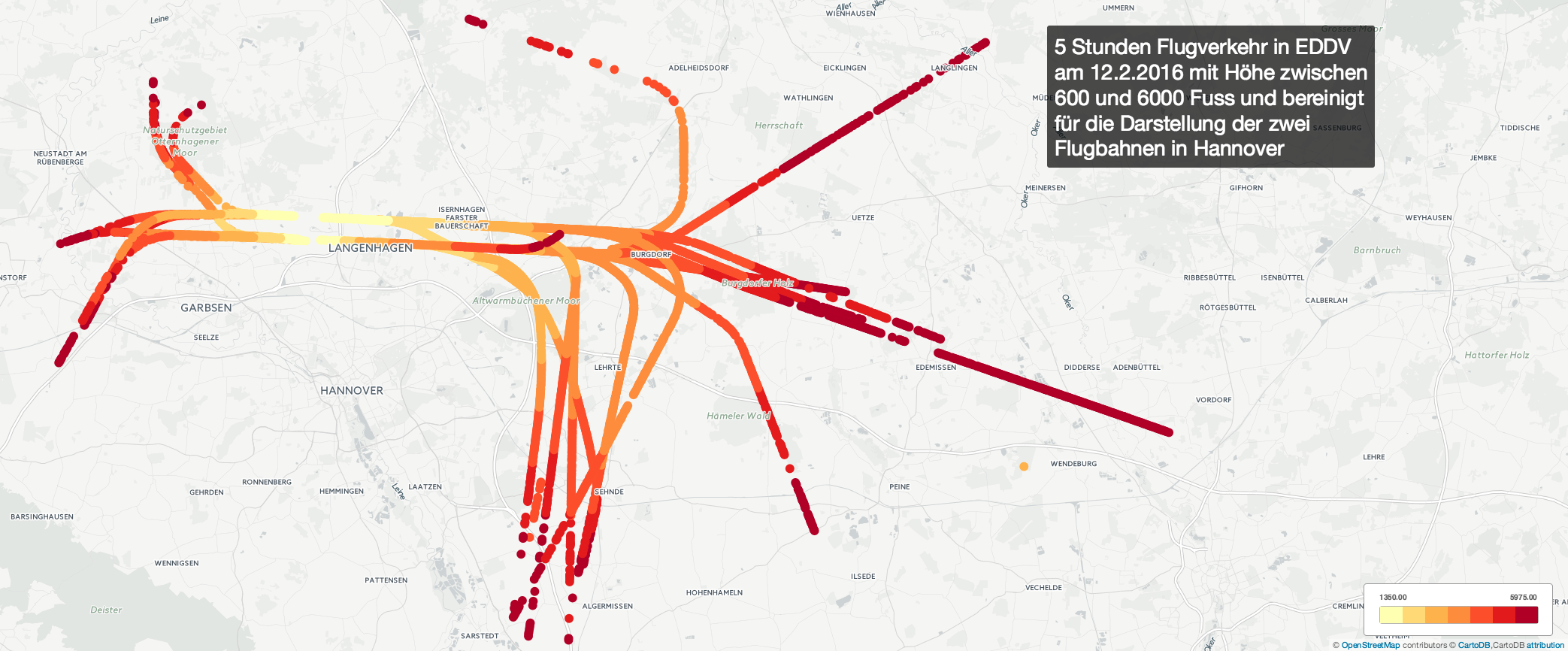
ADS-B mit Raspberry Pi: Visualisierung von zwei Landebahnen in Hannover
Optimiert mit SQL um die Darstellung von zwei Landebahnen (von dreien:
- 09C/27C 780 m × 23 m Asphalt
- 09R/27L 2340 m × 45 m Beton
- 09L/27R 3200 m × 45 m Beton
) zu visualisieren:
 „ADS-B mit Raspberry Pi: Visualisierung von zwei Landebahnen in Hannover“ weiterlesen
„ADS-B mit Raspberry Pi: Visualisierung von zwei Landebahnen in Hannover“ weiterlesen
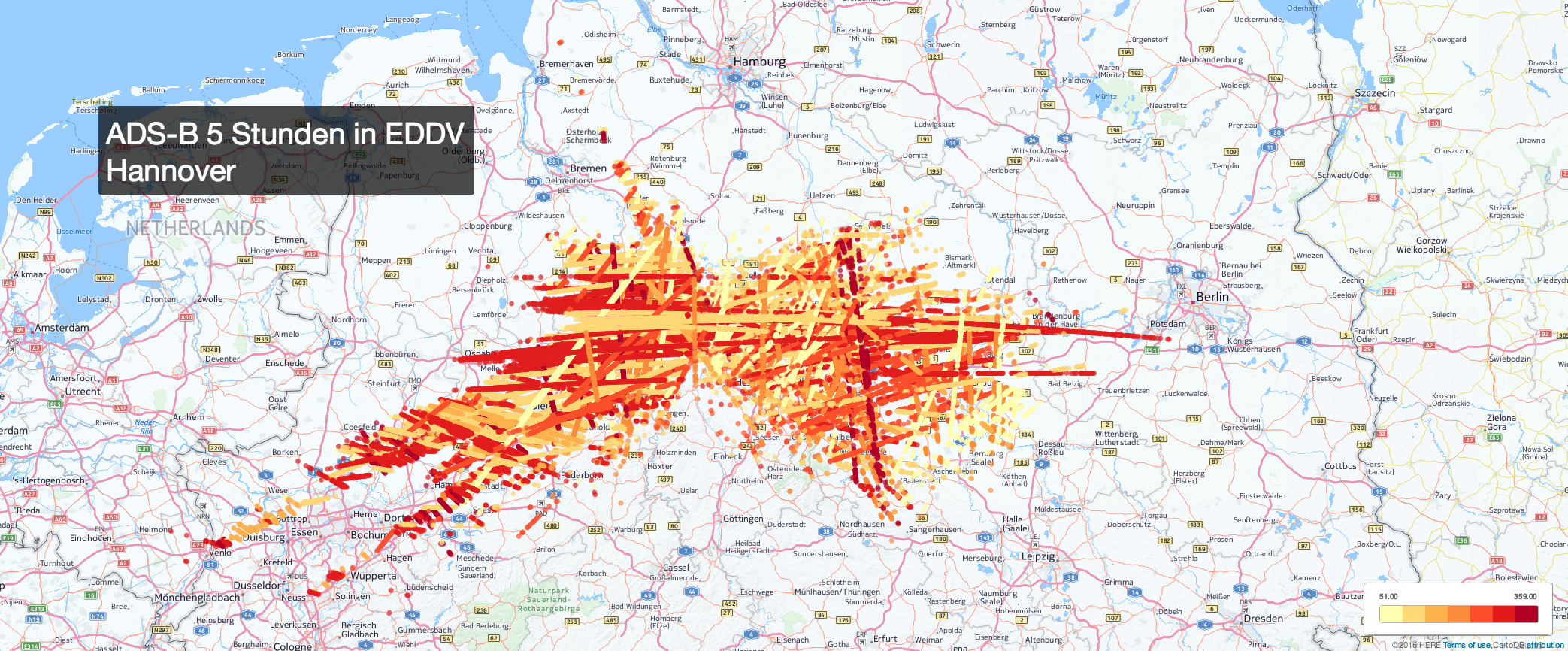
5 Stunden Tracks aufgezeichnet vom Raspberry Pi in Hannover (EDDV)
20 min Flugverkehr-Visualisierung als Film
Die vom Raspberry Pi via DUMP1090 empfangenen Flug Daten von heute 9.2.2016 (20 min Langenhagen) als Film visualisiert.
Die einzelnen Farben sind die jeweiligen Flüge, siehe Legende.
Klick auf den > Start Button wenn der Film noch nicht läuft.
Wie findet Ihr das?
Ca. 4 Stunden am Samstag den 6.1.16: Flugverkehr in Hannover Langenhagen (EDDV) als Track vom Raspberry Pi via DUMP1090
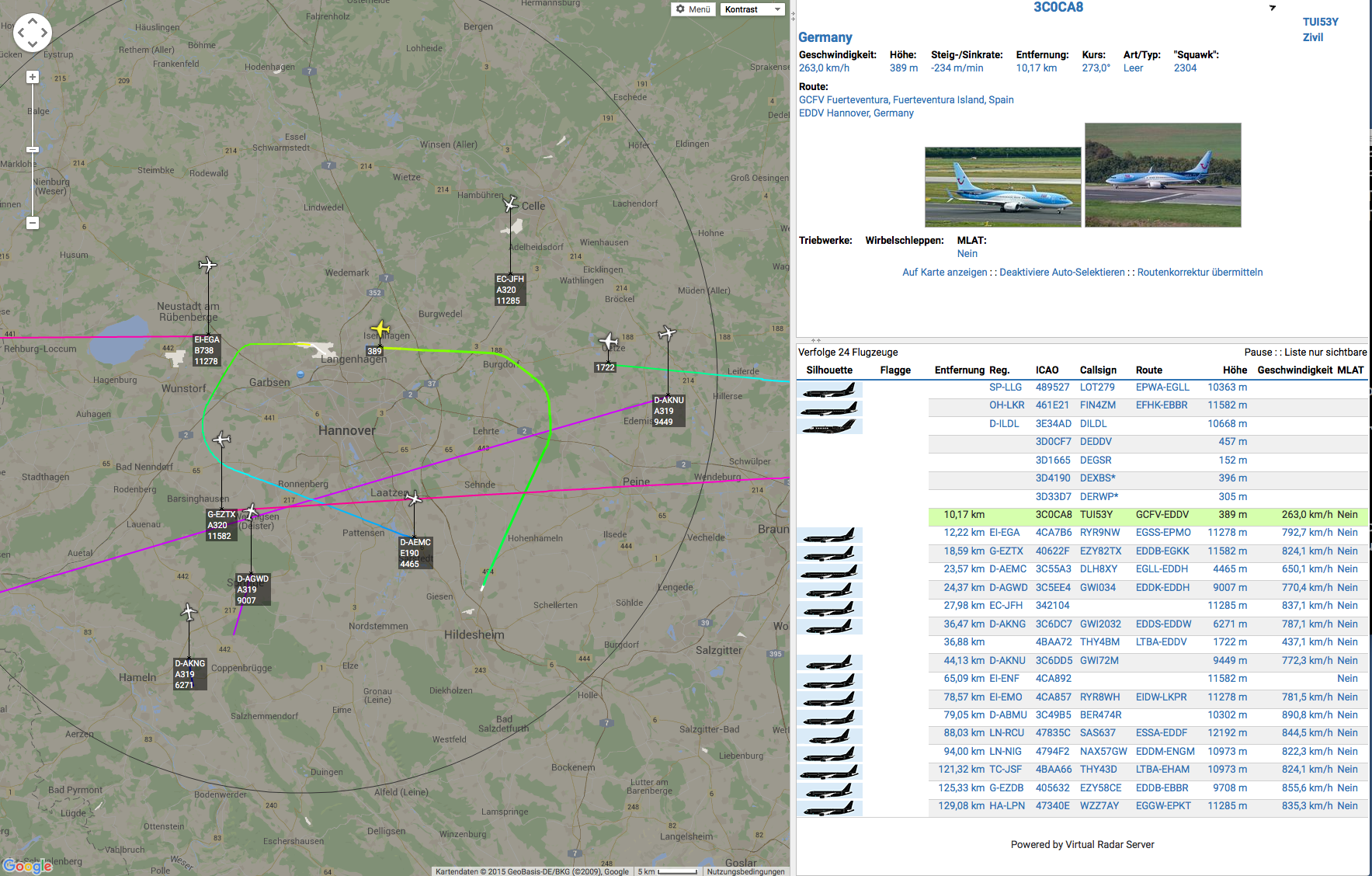
Raspberry Pi: Alle 5 Minuten neu, aktueller Flugstatus in Hannover (EDDV)
Wie wird VirtualRadar auf die Neueste Version 2.3.1 upgedated?
Seit ein paar Wochen gibt es eine neue Version von des Virtual Radar Servers. Wie wird eine vorhandene Installation die auf einem Mac OS X läuft und Daten von einem Raspberry Pi empfängt nun aktualisiert?
Was ist Neu? „Wie wird VirtualRadar auf die Neueste Version 2.3.1 upgedated?“ weiterlesen
214 km Empfang gestern mit dem Raspberry Pi
Dump1090 auf dem Raspberry Pi aktualisieren (da Lufthansa und UFO sich ja näher kommen)
Bei mir läuft nun seit einigen Wochen die Dump1090 dev1.15 Version auf dem Raspberry Pi. Wie kann diese nun aktualisiert werden?
Wie hier schon kurz beschrieben, „Dump1090 auf dem Raspberry Pi aktualisieren (da Lufthansa und UFO sich ja näher kommen)“ weiterlesen
Was ist zu tun, wenn auf einem Raspberry Pi bei apt-get update der folgende Fehler erscheint: „GPG error: http://repo.mutability.co.uk wheezy Release: The following signatures were invalid: KEYEXPIRED“
Was ist zu tun, wenn auf einem Raspberry Pi bei einem
|
1 |
sudo apt-get update |
der folgende Fehler erscheint:
„GPG error: http://repo.mutability.co.uk wheezy Release: The following signatures were invalid: KEYEXPIRED“

Da ist ein GPG Key abgelaufen. Der Key kann wie folgt aktualisiert werden: „Was ist zu tun, wenn auf einem Raspberry Pi bei apt-get update der folgende Fehler erscheint: „GPG error: http://repo.mutability.co.uk wheezy Release: The following signatures were invalid: KEYEXPIRED““ weiterlesen
Raspberry Pi Dump 1090: maximaler Transponder Empfang
Wollt mal wissen, wie weit maximal der Transponderempfang von Flugzeugen von Langenhagen mit dem Raspberry Pi aus möglich ist. Der max. Empfang hängt von der Erdkrümmung und dem Gelände ab. Wenn Berge vor der Nase sind, ist in die Richtung leider kein Empfang möglich. Aufgrund dieser Umstände ist nicht mehr als 450 Km / 250 nautical miles möglich.
Um diese Frage zu beantworten gibt es die Seite heywhatsthat.com.
Dort kann man sich eine Grafik generieren lassen.
1. http://www.heywhatsthat.com/ aufrufen und auf den Tab oben New Panorama klicken.
2. Dann die latidude und longitude eingeben, oder den Ort suchen lassen. Dann unter 3. die Höhe der Antenne in Meter angeben. Bei 4. kann noch ein frei zu wählender Titel eingegeben werden. Unter der Grafik auf Metric stellen und auf Submit request klicken.
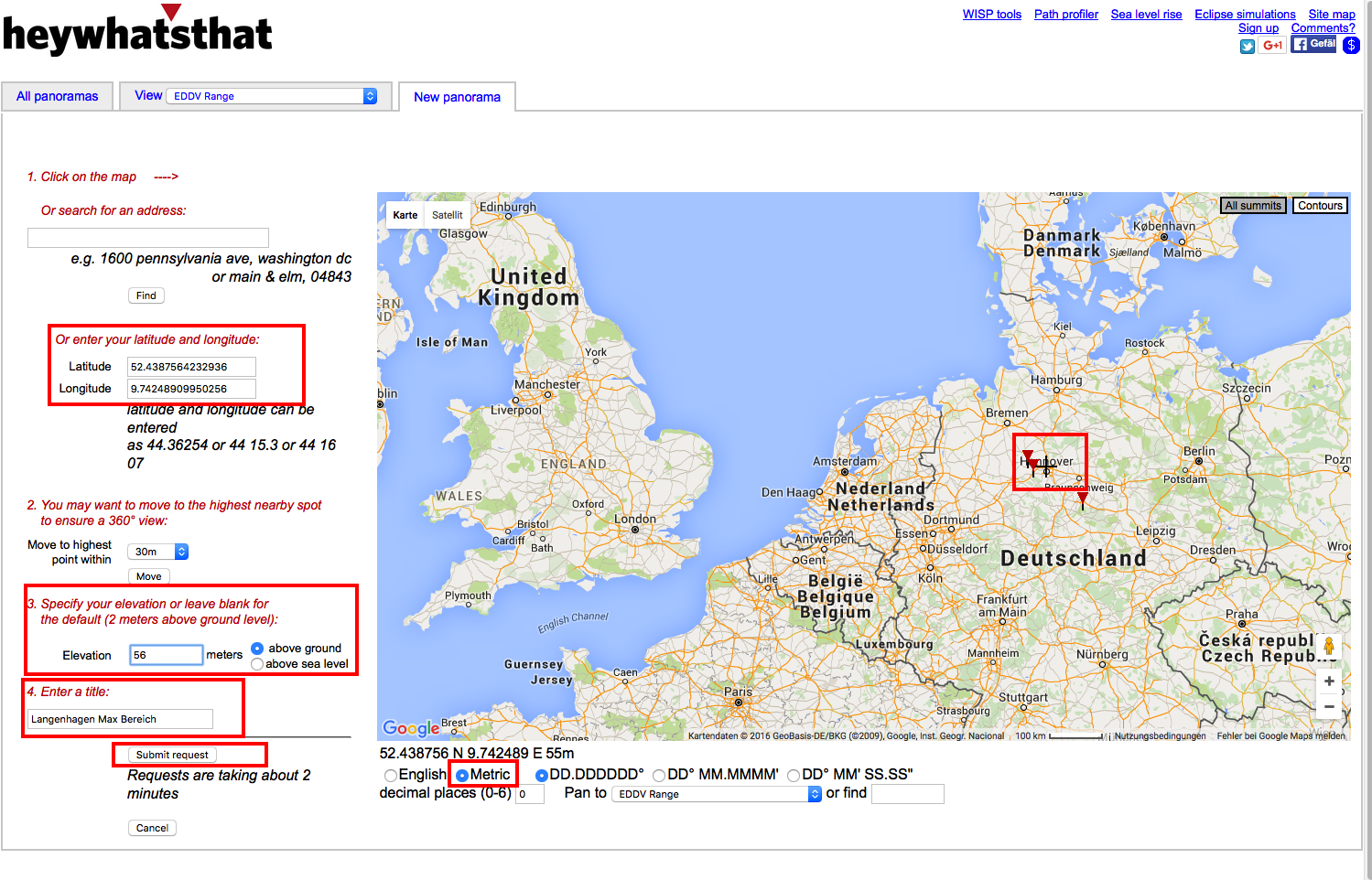
Dann kommt für 2 Minuten ein Werbebanner und dann die Ergebnisseite. „Raspberry Pi Dump 1090: maximaler Transponder Empfang“ weiterlesen
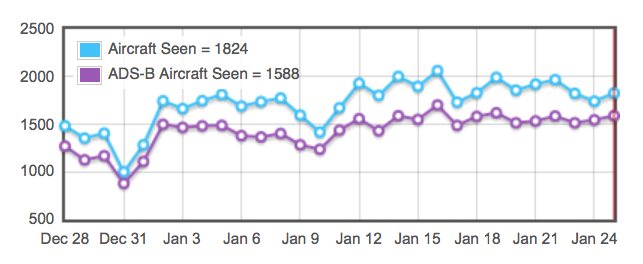
Raspberry Pi: Coole DUMP1090 Diagramme zur Flugstatistik mit rrdtool
Der beginn eines neuen Jahres ist auch ein guter Zeitpunkt, für die Erfassung von einigen Flugdaten die der Raspberry Pi empfängt, wie z.B. ADS-B Message Rate, ADS-B Anzahl Flugzeuge, ADS-B max. Bereich, ADS-B Tracks, CPU Temperatur mit RRDtool (Round-Robin-Database) zu verarbeiten.
Es gibt da ein gutes Script, welches die Installation erleichtert und Diagramme wie z.B. dieses von Silvester auf Neujahr in Hannover erstellt:
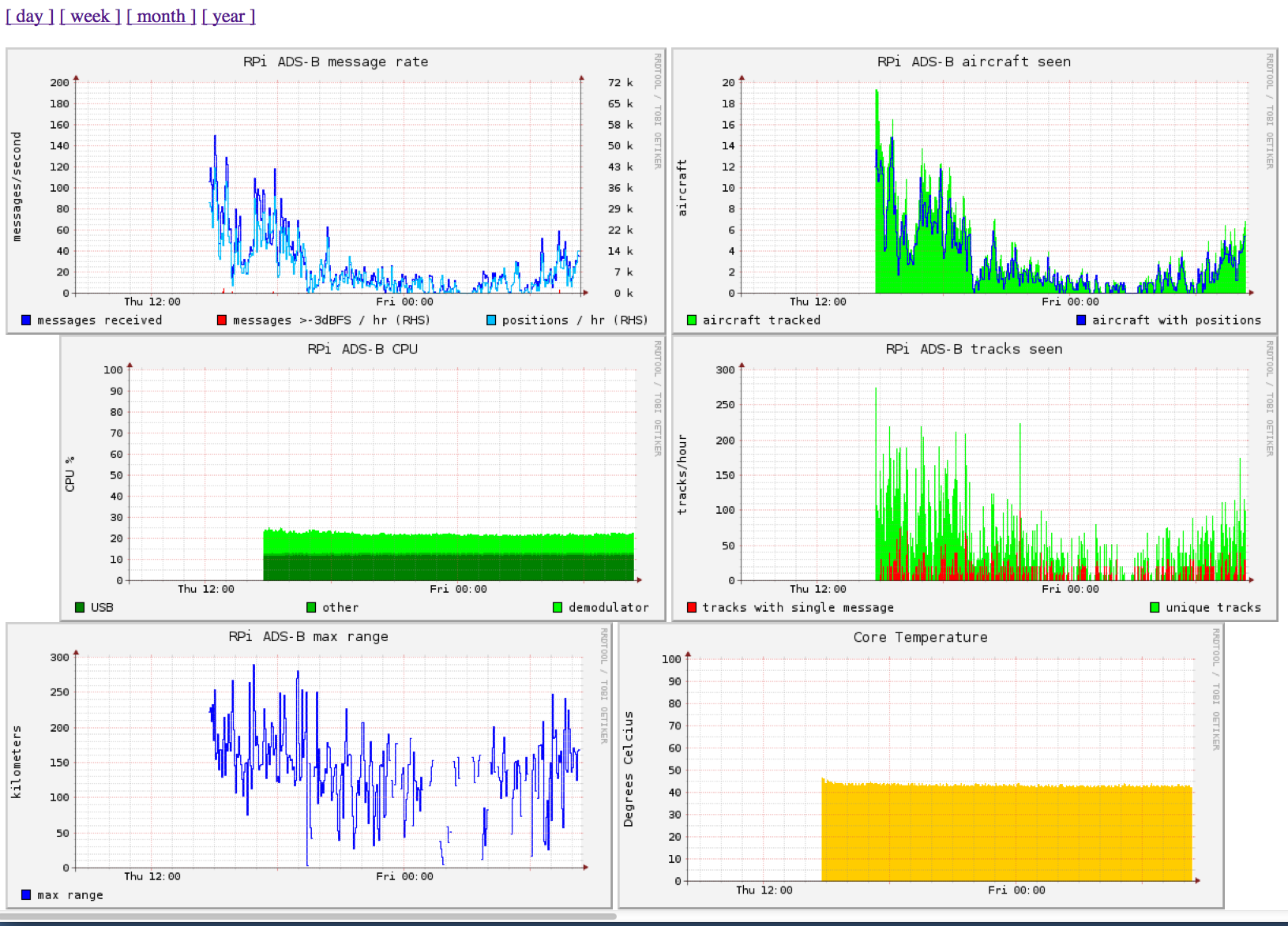
Und so wird es installiert „Raspberry Pi: Coole DUMP1090 Diagramme zur Flugstatistik mit rrdtool“ weiterlesen
Raspberry Pi: Wie wird das letztes Update in 2015 für Piaware 2.1.5 installiert
Seit dem 24.12.2015 gibt es eine neue Piaware Software. Mit folgenden Kleinigkeiten ab 2.1.4
- Correctly handle connection errors during socket creation.
- Improve early connection liveness checks.
- Update CA certificates used to validate piaware connections.
- Log more info when we get errors/alerts from openssl.
- Continue trying to reconnect if a connection fails because validation fails.
- Be more careful about how we deal with timers to avoid duplicates or missing timers.
- Avoid a tcl segfault when running on tcl 8.6.[012]
Wir wird die Version nun upgedated? Einfach auf der Pi Konsole:
|
1 2 3 4 5 6 7 8 |
sudo apt-get update sudo apt-get upgrade # Programm downloaden wget http://flightaware.com/adsb/piaware/files/piaware_2.1-5_armhf.deb # neue Version updaten sudo dpkg -i piaware_2.1-5_armhf.deb # und ein Restart sudo /etc/init.d/piaware restart |
Dann auf der Seite checken, ob die neue Version erkannt wird:

Super, das läuft. Auch werden jetzt ab dem 18.12.2015 die MLAT Verbindungen angezeigt. „Raspberry Pi: Wie wird das letztes Update in 2015 für Piaware 2.1.5 installiert“ weiterlesen
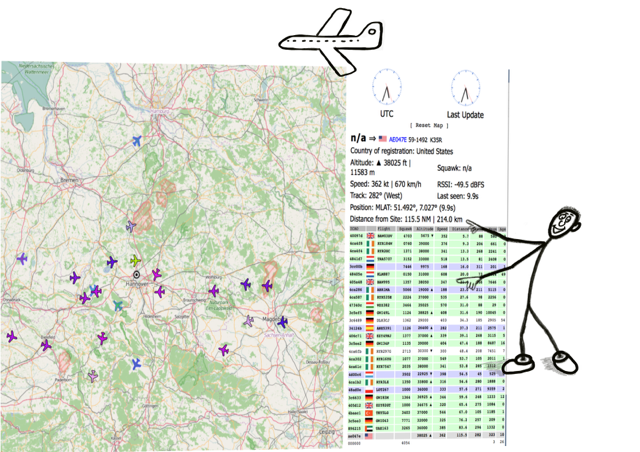
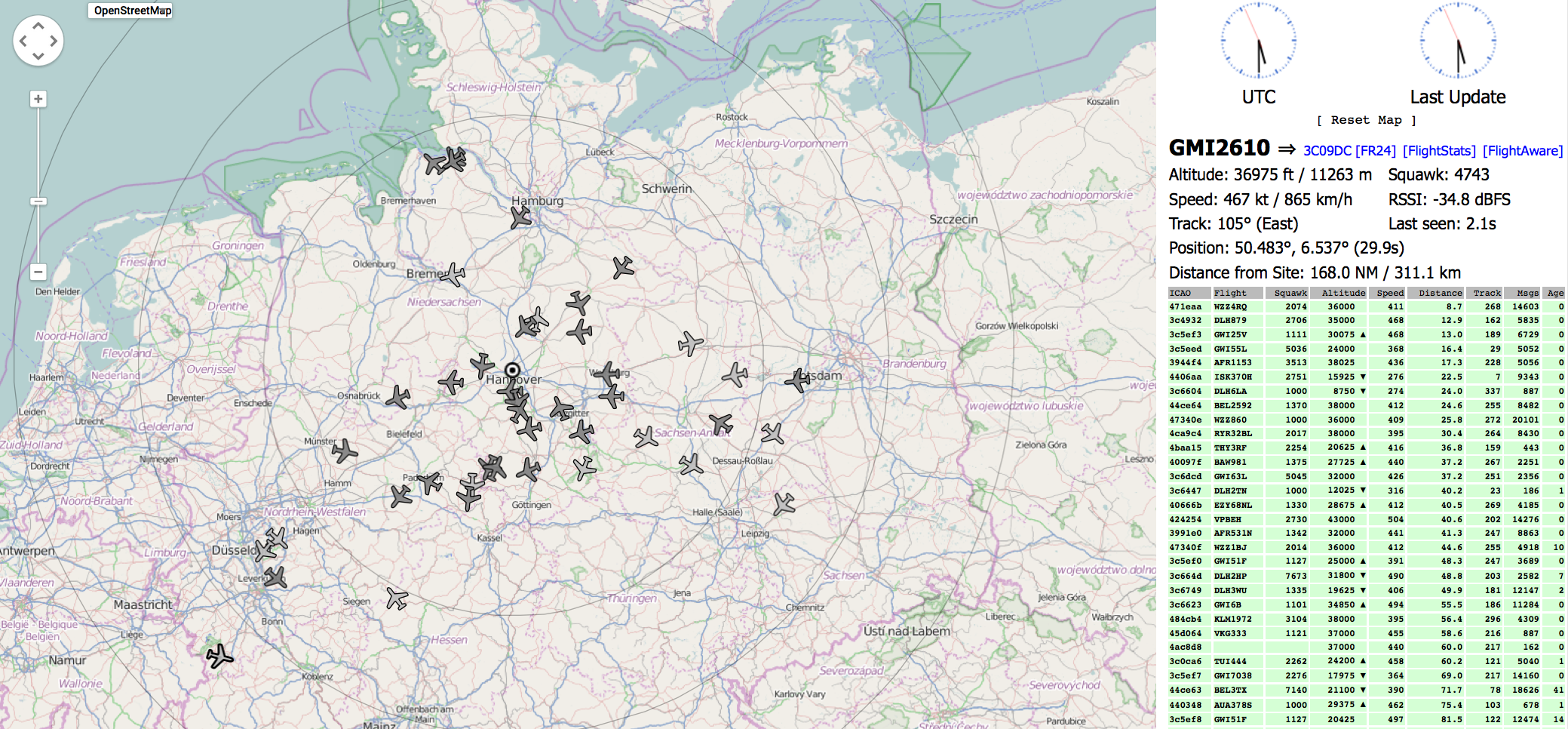
Der Raspberry Pi empfängt zur Zeit ca. 30 Flugzeutransponder aus bis zu 262 km Entfernung
Der Raspberry Pi empfängt zur Zeit ca. 30 Flugzeutransponer. Es ist richtig was los in EDDV. 262 km und das mit einer Zimmerantenne! Cool
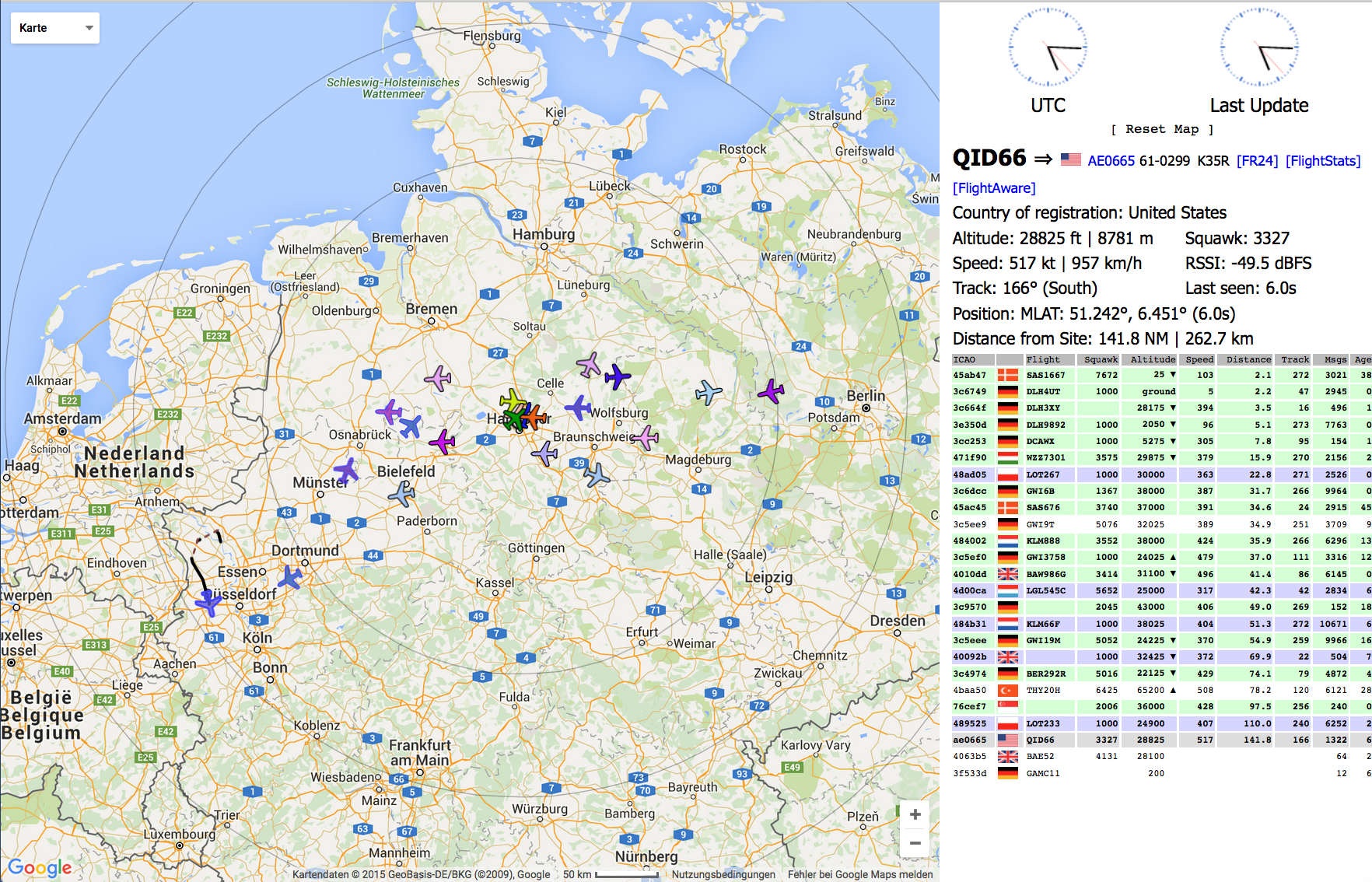
Und hier einmal zwei Aufnahmen, wo man gut die Landebahn und Landeanflug in EDDV erkennen kann:
„Der Raspberry Pi empfängt zur Zeit ca. 30 Flugzeutransponder aus bis zu 262 km Entfernung“ weiterlesen
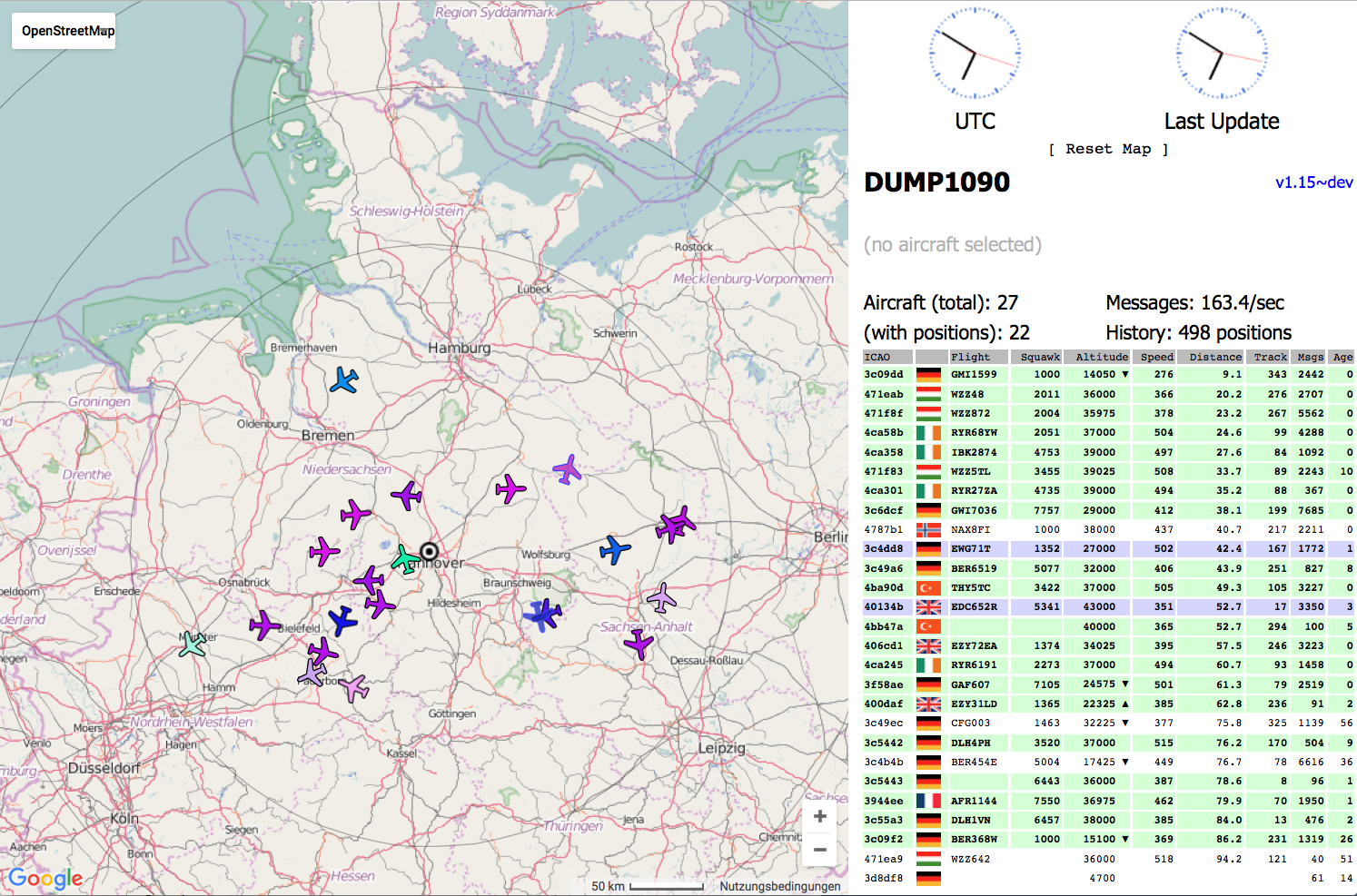
Dump1090 (V 1.15.dev) dark map vom Raspberry Pi Server trotz Streik
In Hannover wird von der Lufthansa noch nicht gestreikt. Hier die Flugzeuge die vom Raspberry Pi empfangen werden. Mal als dark map:
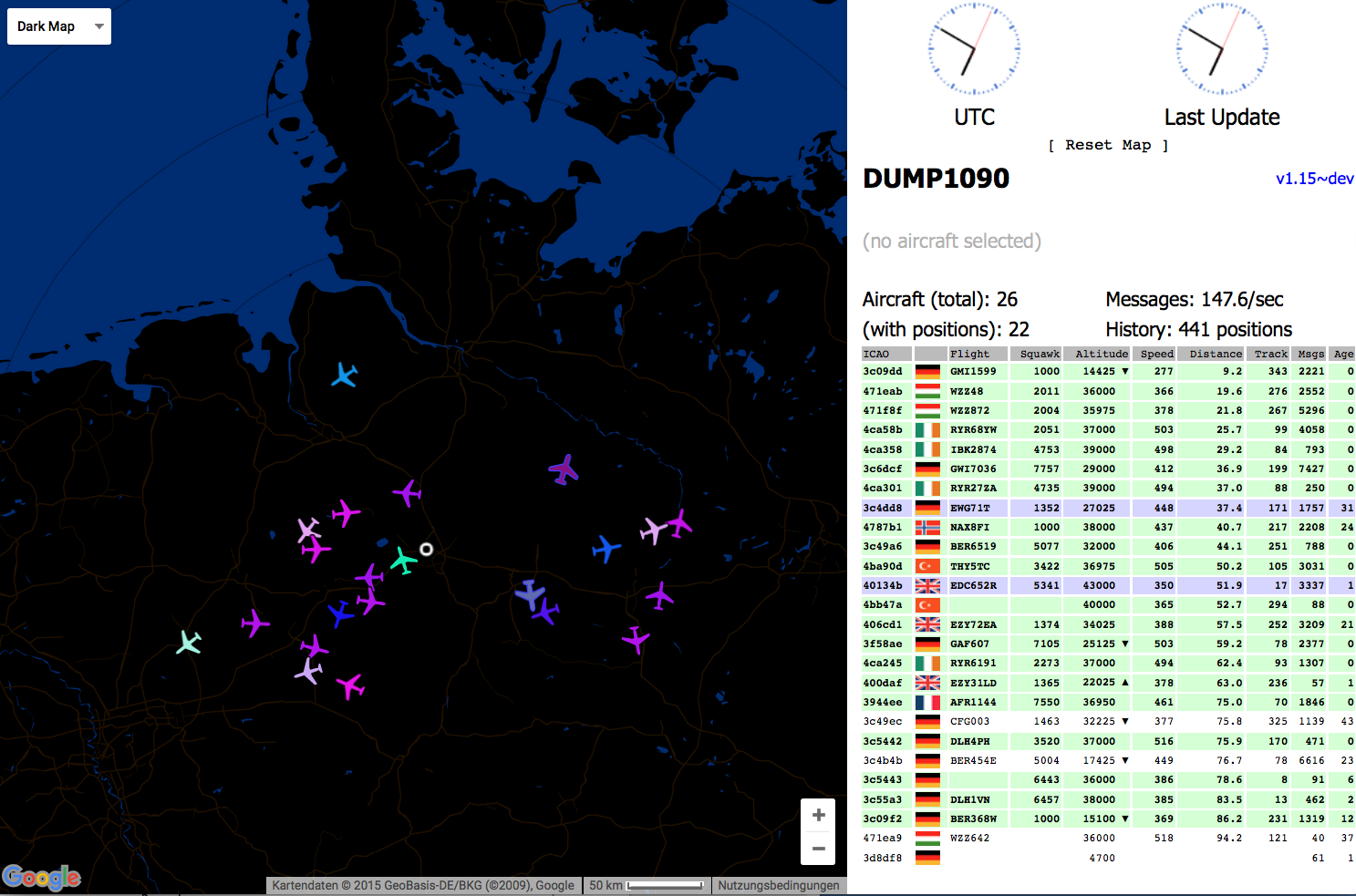
Und als OpenStreetMap:
Raspberry Pi: Wie kann die aktuellste Version v1.15-dev von dump1090-mutability für die Anzeige von MLAT installiert werden?
Für dump1090-mutability gibt es bis jetzt noch kein Release, das auch MLAT anzeigen kann.
Multilateration oder kurz MLAT errechnet die Position eines Flugzeuges anhand seiner ModeS-Daten. Dazu sind mindestens vier MLAT-fähige Bodenstationen in einem Gebiet von etwa 250 km Radius nötig, um entsprechend qualitative Positionsdaten mit einer Abweichung unter 100 Metern zu liefern. Mit MLAT können nur Flüge über eine Flughöhe von 10.000 ft dargestellt werden, für die Flugbereiche darunter würde ein engmaschiges Netz von mind. vier MLAT-Empfangsstationen benötigt, um eine möglichst Abdeckung erreichen zu können.
Damit auch MLAT Flugzeuge angezeigt werden können, muss aus den aktuellsten Sourcen ein Install-Package erzeugt und installiert werden. Das geht in einer halben Stunde wie folgt:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 |
# Hilfs Package installieren sudo apt-get install librtlsdr-dev libusb-1.0-0-dev pkg-config debhelper git-core # Libs landen und installieren wget https://github.com/mutability/librtlsdr/releases/download/v0.5.4_git-1/librtlsdr0_0.5.4.git-1_armhf.deb wget https://github.com/mutability/librtlsdr/releases/download/v0.5.4_git-1/librtlsdr-dev_0.5.4.git-1_armhf.deb sudo dpkg -i librtlsdr0_0.5.4.git-1_armhf.deb sudo dpkg -i librtlsdr-dev_0.5.4.git-1_armhf.deb # Verzeichnis erstellen und in das Verzeichnis wechseln mkdir neue-dev-version cd neue-dev-version/ # Aktuellen Entwicklungsstand holen git clone https://github.com/mutability/dump1090.git # in das Dump1090 Verzeichnis gehen cd dump1090 # Package bauen, das dauert ein paar Minuten (ca. 10) dpkg-buildpackage -b # in das Verzeichnis mit dem neuen Package wechseln und das erzeugt Package installieren cd .. sudo dpkg -i dump1090-mutability_1.15~dev_armhf.deb |
Das Ergebnis sieht wie folgt aus:
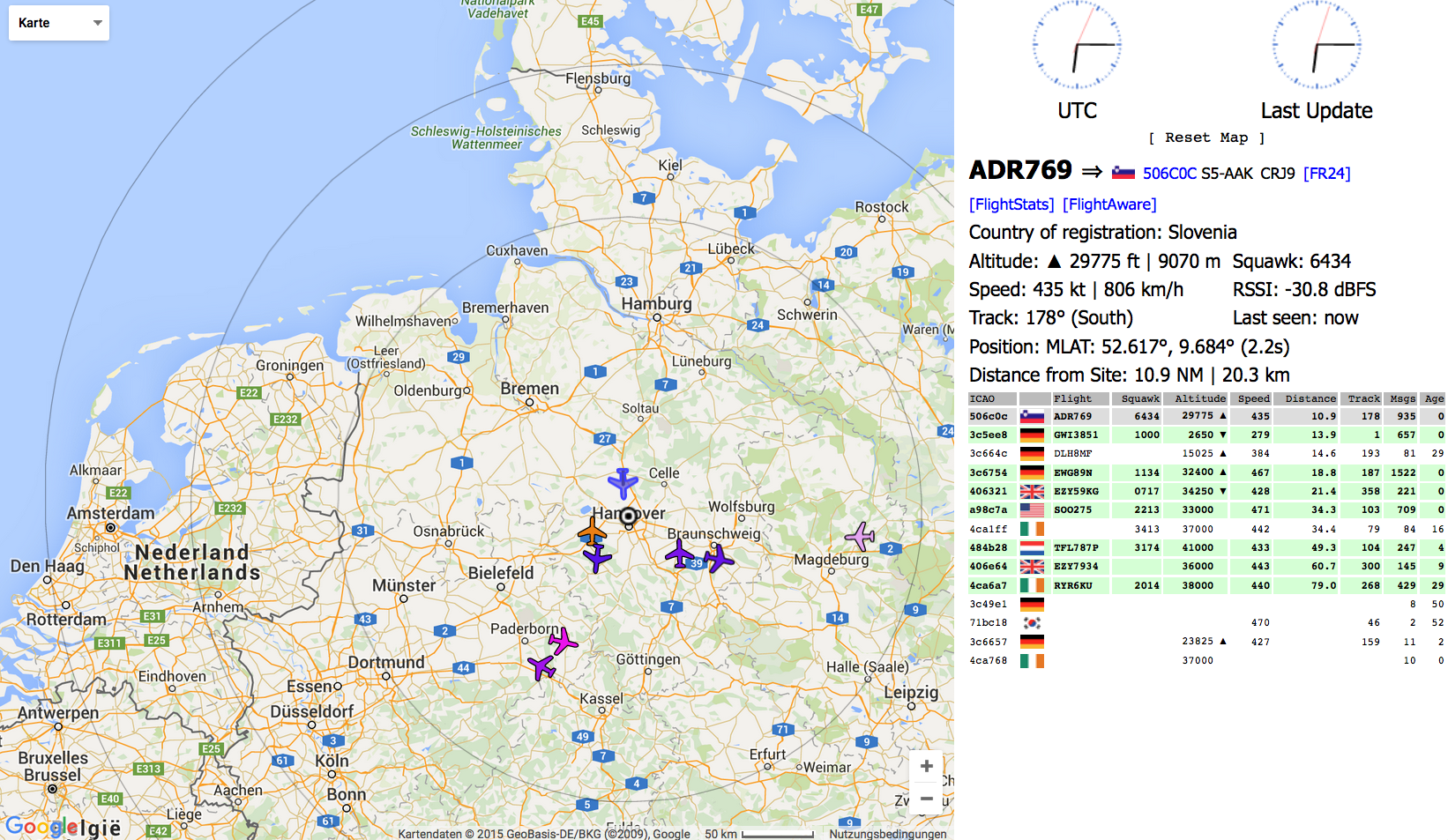
Oben rechts wird nun die neue Version angezeigt. Neu sind auch die angezeigten Flaggen und es werden jetzt auch alle Flugzeuge in der Tabelle und in der Karte lila angezeigt die keinen Transponder haben und per MLAT bestimmt werden.
Cool, ich bin begeistert! „Raspberry Pi: Wie kann die aktuellste Version v1.15-dev von dump1090-mutability für die Anzeige von MLAT installiert werden?“ weiterlesen
Raspberry Pi: Flugzeug Transponder Empfang mit DUMP1090 in Hannover legt zu – 2,5 Millionen Gäste in EDDV – 200 Starts und Landungen
Der Flughafen in Hannover (Langenhagen) meldet ein Plus im Juli von 6,5 %. Das habe ich mal mit dem Raspberry Pi mit DUMP1090 validiert.
Hier das Ergebnis der Auswertung:
Raspberry Pi: Bei schönen Wetter in Langenhagen – Empfang der Flugzeugtransponderdaten aus über 300 Km Entfernung
Heute ist das Wetter in Langenhagen sehr schön. Da habe ich die Antenne mal nach draußen gestellt.
Das Ergebnis ist erstaunlich. Über 50 Flugzeuge werden gleichzeitig mit dem Raspberry Pi via DUMP1090 empfangen:
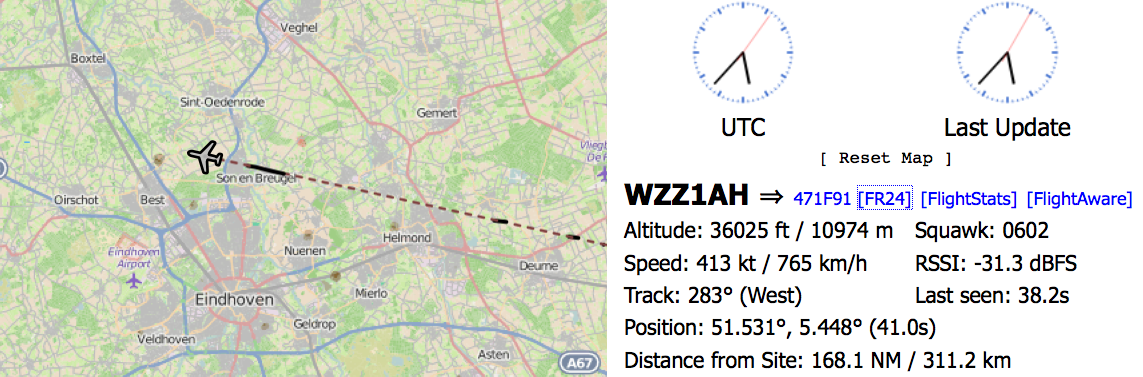
Dieser A320 z.B. der nach London fliegt, kann bis nach Eindhoven in den Niederlanden empfangen werden, das sind über 300 Km wie man sehen kann:
Und heute Nachmittag über 70 Flugzeuge gleichzeitig:
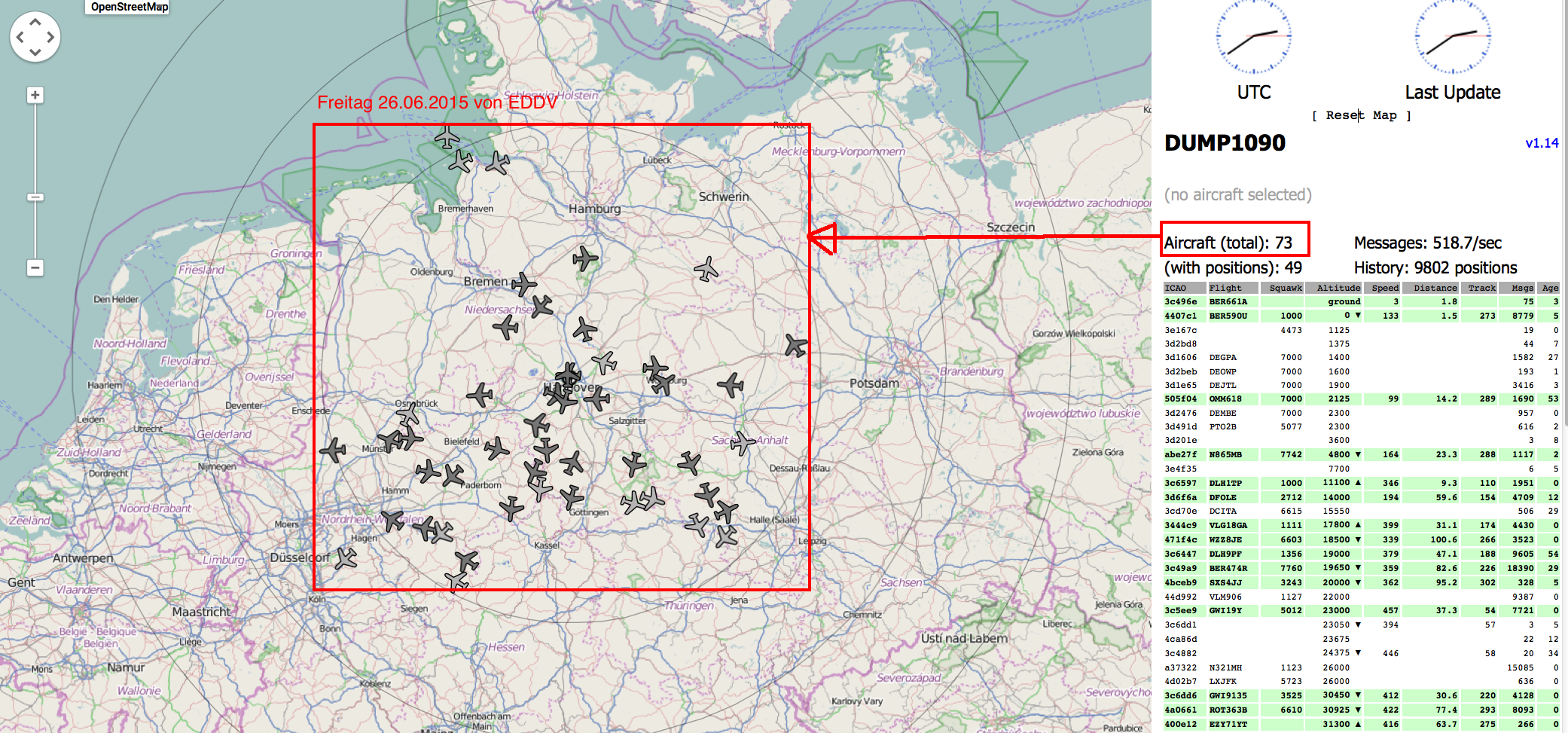
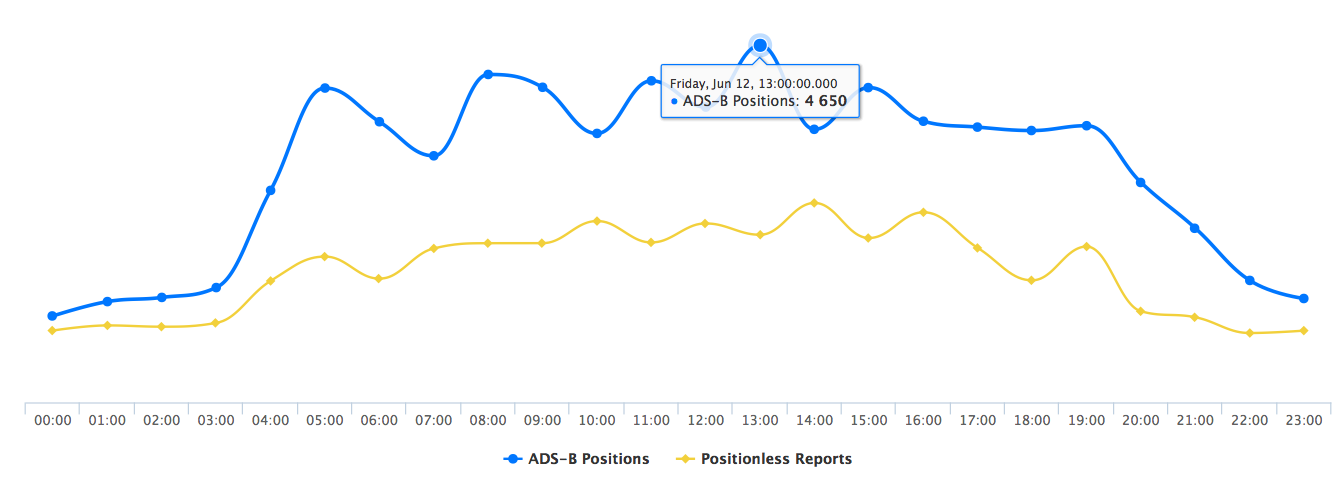
Raspberry Pi: Wie ist die Reichweite der empfangenen Flugzeuge von EDDV per ADS-B und selbst gebauter Antenne?
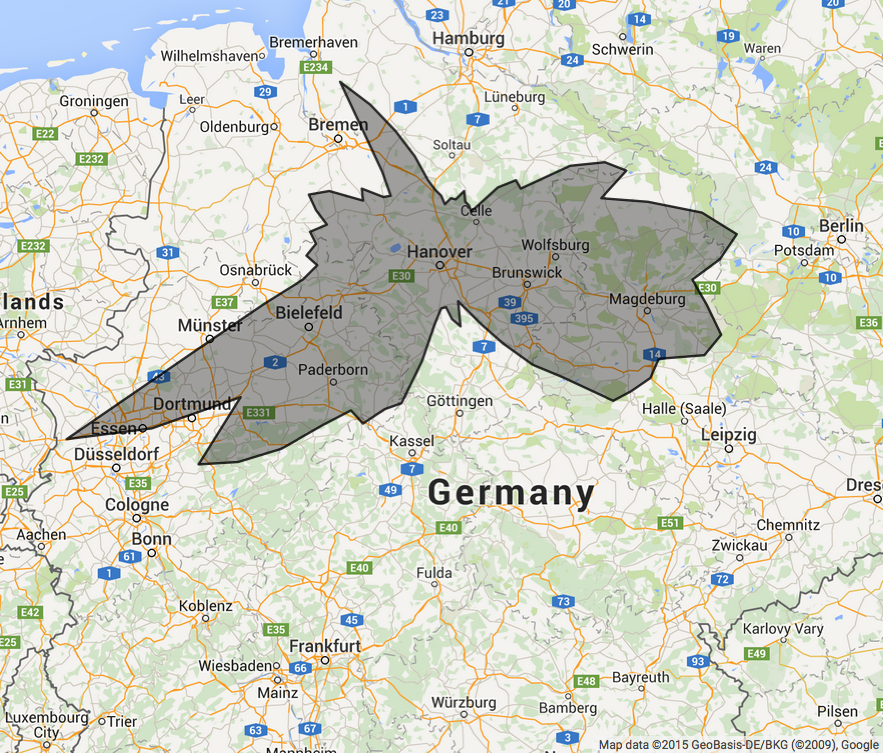
Was empfängt der Raspberry Pi in EDDV so an Flugzeuge an einem ganz normalen Freitag (12.6.2015) per ADS-B?
Streik EDDV: Raspberry Pi mit TWFlug und Dump1090 Flugauswertung (Planspotter) mit Fhem
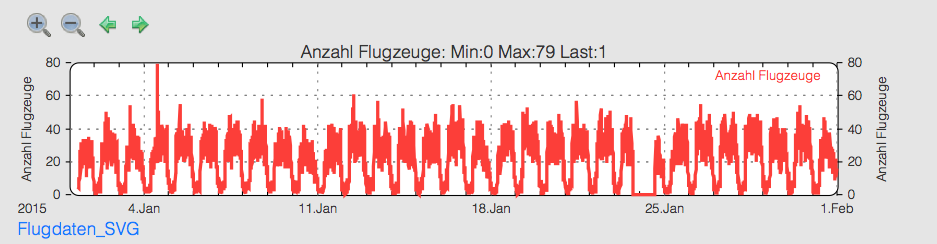
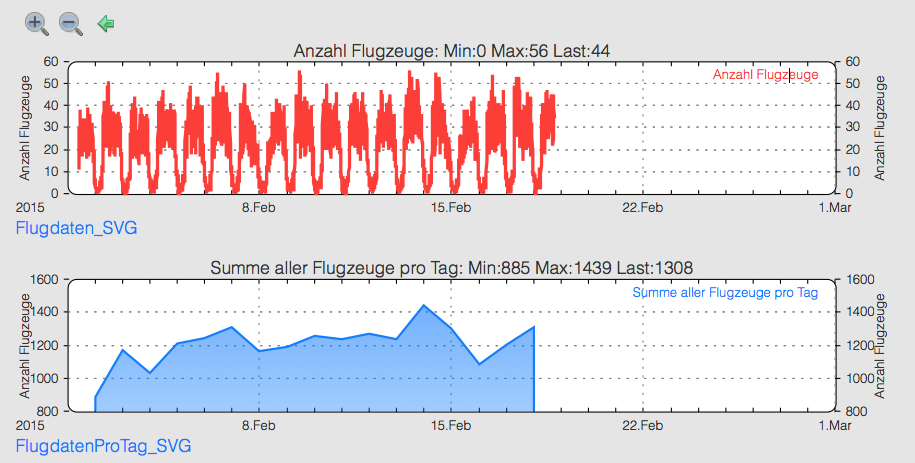
Der Streik am 30.1.2015 am Flughafen in Hannover hat keine relevanten Auswirkungen auf den Flugverkehr, der von mir mit einem Raspberry Pi und DUMP1090 via Fhem erfasst wird. Das zeigen diese Grafiken:
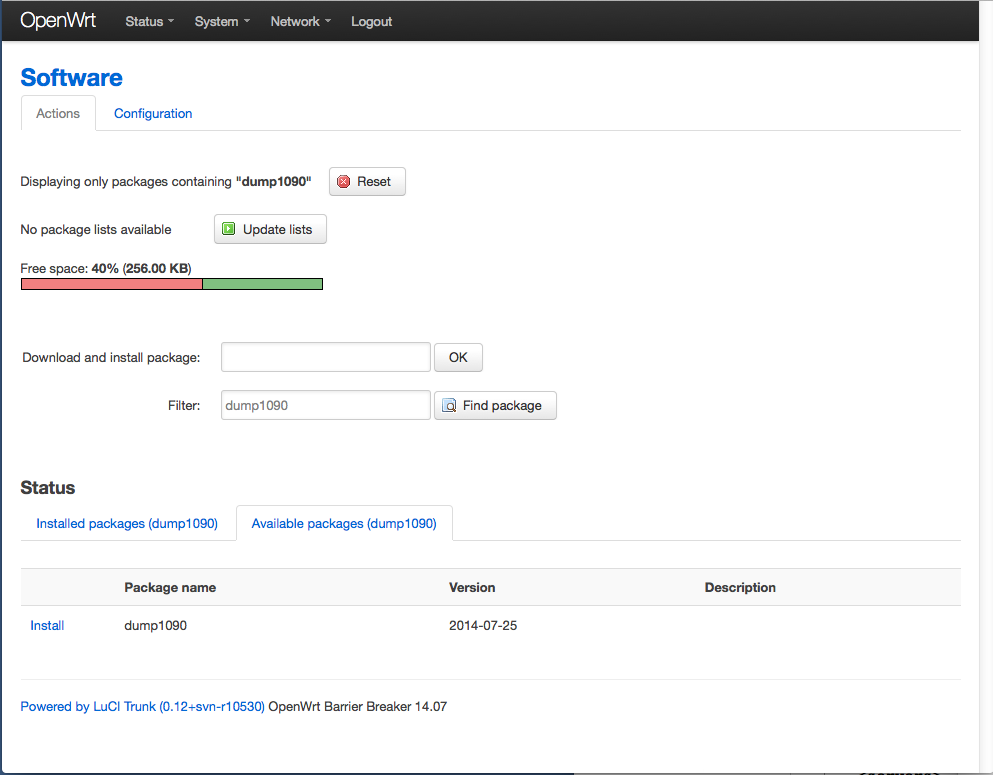
OpenWrt Barrier Breaker 14.07: Wie kann Dump1090 auf einem TP-WR703N Router unter OpenWrt zum Airplanespotting installiert werden?
Hatte noch einen TP-WR703N rumliegen. Wenn dort die aktuelle Version von OpenWrt (14.07) installiert ist, geht es mit LuCI sehr schnell.
Auf die Seite System – Software gehen. Im Filter dump1090 eingeben und auf Find package klicken. Dann unten mit klick auf Install das fertige Package installieren.
Mindmaps ab jetzt auf kleinhirn.eu
Ab jetzt werden die Mindmaps auf der Domäne kleinhirn.eu veröffentlicht.
Für das dump1090-mutability (1.13) unter Debian für den Raspberry Pi gibt es da jetzt auch eine Mindmap.
Vorgestern wurde eine neue Version von dump1090-mutability (1.13) für den Raspberry Pi veröffentlicht
Die neue Version von Dump1090-mutability ist in der Version 1.13 veröffentlicht worden.
Was es neues gibt, steht hier. Läuft auf dem rPi mit ca. 30% CPU Last, wie man mit htop sehen kann:

Sieht doch cool aus, oder?
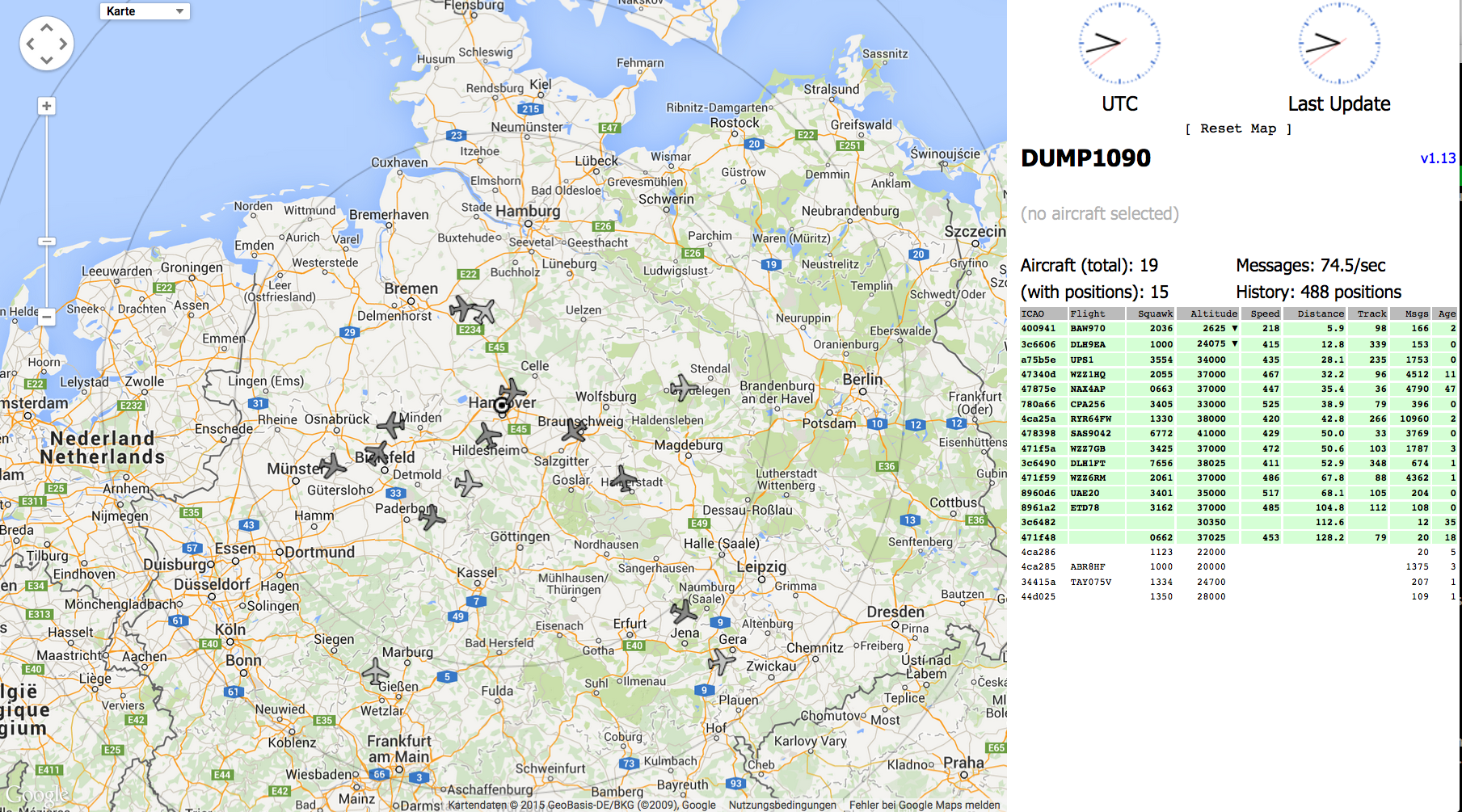
Hier mal eine Auswertung der letzten Tage aus EDDV:
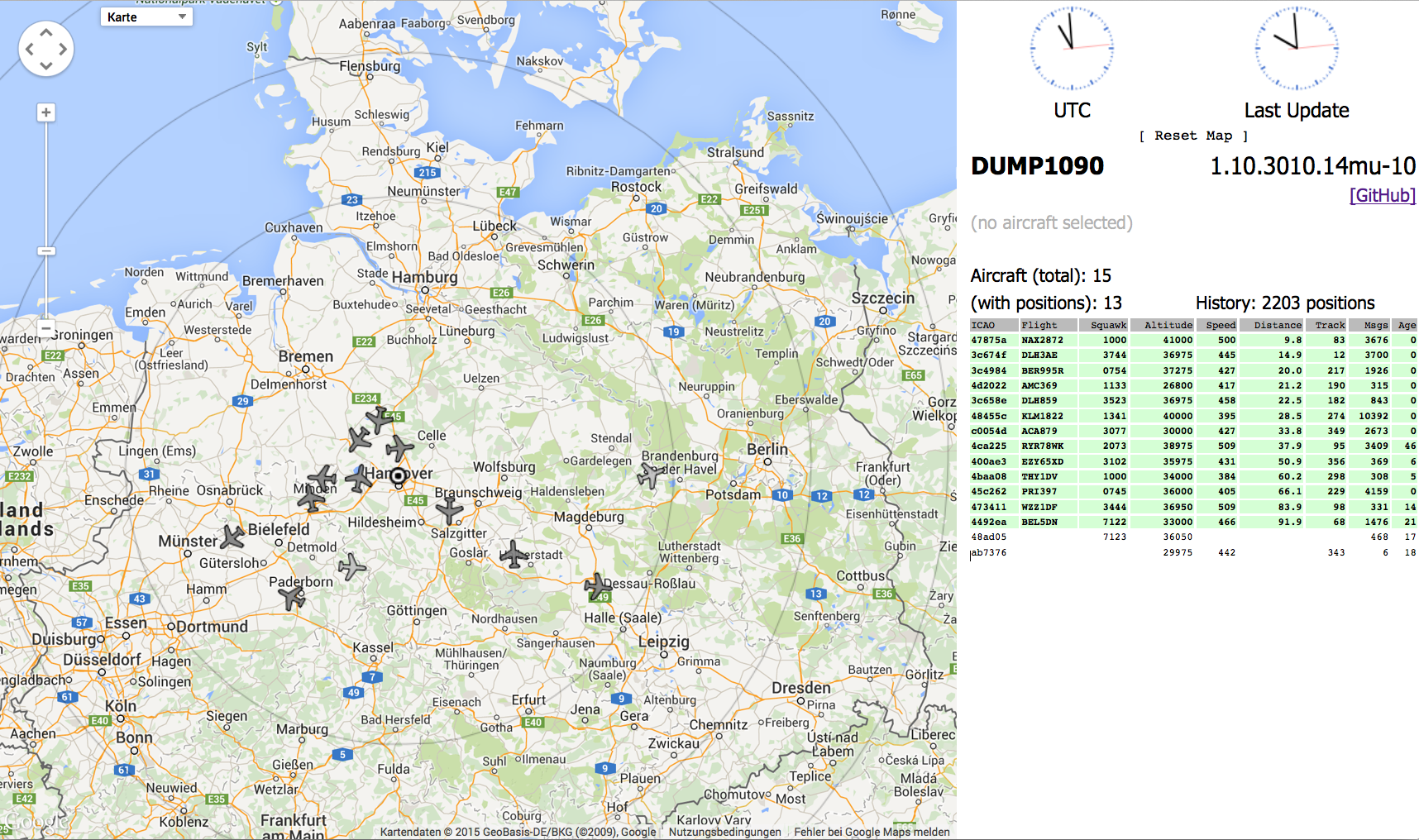
Raspberry Pi: Neue Version dump1090-mutability (1.10.3010.14mu-11) veröffentlicht
Wie hier beschrieben, gibt es einen neuen fork von DUMP1090. Nun ist wieder eine neue Version erschienen (1.10.3010.14mu-11).
Was ist neu?
-Es kann jetzt ein maximaler Bereich angegeben werden mit Parameter –max-range parameter
-Anzeige der Nachrichten Zeit
-Fix bei der UTC Uhr anzeige
-Fix im Info Panel
-Farbe des Flugeuges grau wenn es nicht mehr gesehen wird
-Fix beim beenden über SIGINT
-div. Fix..
Wie kann das update installiert werden?
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 |
# System aktualisieren sudo update sudo upgrade # Version downloaden wget https://github.com/mutability/dump1090/releases/download/v1.10.3010.14mu-11/dump1090-mutability_1.10.3010.14mu-11_armhf.deb # Laufenden Server stopen sudo /etc/init.d/dump1090-mutability stop # Version installieren sudo dpkg -i dump1090-mutability_1.10.3010.14mu-11_armhf.deb # Es erscheint eine Frage nach dem maximalen Bereich in nautische Meilen Eingab z.B. 200 # Checken ob der Server läuft sudo /etc/init.d/dump1090-mutability status # Ausgabe: [ ok ] dump1090-mutability is running. # Archive kann gelöscht werden rm dump1090-mutability_1.10.3010.14mu-11_armhf.deb |
Dann aufrufen der Seite im Browser mit http://rpi-adresse:port
Raspberry Pi: Wie kann ein neuer Mode S Decoder für RTLSDR Devices (DUMP1090 fork) dump1090-mutability installiert werden?
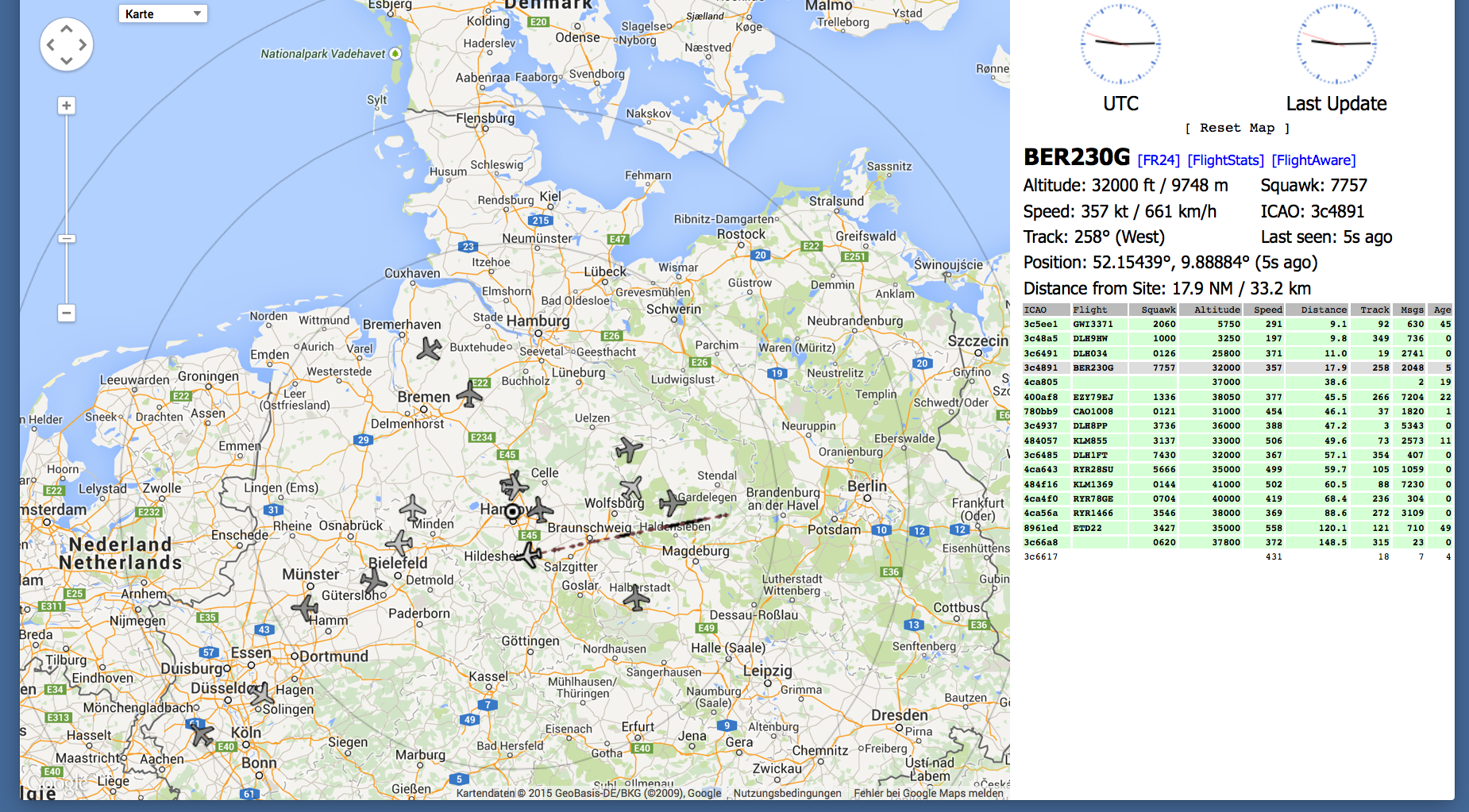
Der DUMP1090 Server läuft bei mir schon lange auf einem eigenen Raspberry Pi B+ ganz gut. Es gibt nun einen neuen fork von Oliver Jowett (thanks), der einige Neuerungen bzw. Erweiterungen hat. Der dump1090-mutability.
Der mutability fork braucht nicht als root laufen und enthält die FlightAware (faupt1090) Verbindung. Auch läßt er sich besser konfigurieren auch mit externen Server. Es gibt auch eine schönere GUI, mit Kreisen rund um den Standort und bessere Daten. So werden jetzt alle Flugzeuge in Summe angezeigt und auch mit Postitionsdaten. Also einige Gründe, mal umzuschwenken.
Hier mal ein Foto um Geschmack zu machen mit der Summe der Flugzeuge:
Und hier ein Foto, wenn ein Flugzeug selektiert ist mit Details:
 „Raspberry Pi: Wie kann ein neuer Mode S Decoder für RTLSDR Devices (DUMP1090 fork) dump1090-mutability installiert werden?“ weiterlesen
„Raspberry Pi: Wie kann ein neuer Mode S Decoder für RTLSDR Devices (DUMP1090 fork) dump1090-mutability installiert werden?“ weiterlesen
DUMP1090 Client TWFlug 0.1.0 für Raspberry Pi, Mac, Windows und Linux veröffentlicht
Habe soeben die 1. Version von dem DUMP1090 Client TWFlug kostenlos 
veröffentlicht.
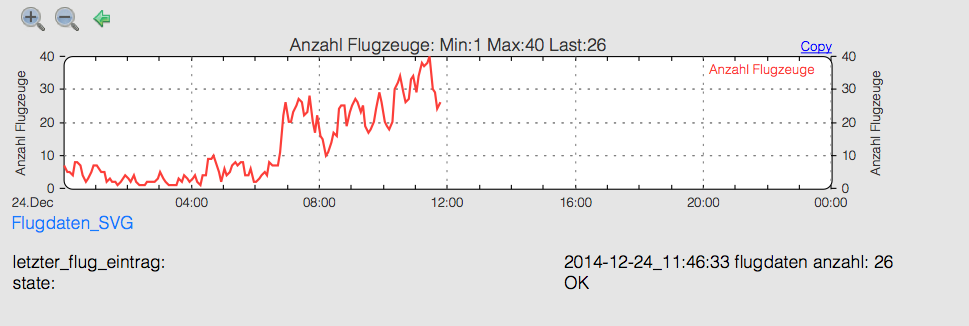
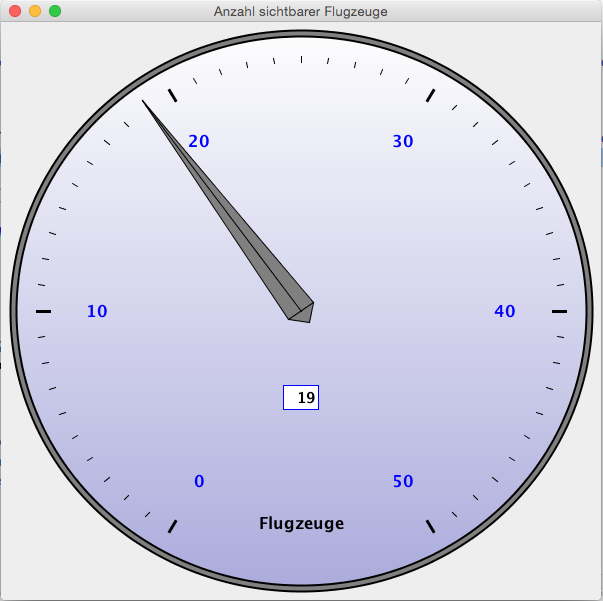
TWFlug liest die Daten von einem DUMP1090 Server und zeigt sie (optional) in einem Tacho an oder/und schreibt die Daten in eine Logdatei für die Auswertung mit z.B. Fhem. Es kann die Logdatei auch per sFTP an einen entfernten Rechner kopieren.
Das TWFlug Programm ist ein Java Programm und läuft somit auf allen Betriebssystem. Es können mit Fhem dann solche schönen Grafiken in Echtzeit angezeigt werden:
Installation:
Download der twflug-0.1.0.zip.
Dann das Archive auspacken.
Für das Starten gibt es zwei Möglichkeiten mit oder ohne GUI.
Ohne GUI mit Eingabe in der Konsole in dem TWFlug Verzeichnis mit:
|
1 |
java -jar twflug.jar -n --ip IP-VOM-DUMP1090-Server |
also z.B. java -jar twflug.jar -n --ip 192.198.1.2
oder mit GUI
|
1 |
java -jar twflug.jar --ip IP-VOM-DUMP1090-Server |
also z.B. java -jar twflug.jar --ip 192.198.1.2
Dann startet nach einigen Sekunden, die folgenden Anzeige von TWFlug:
Weiter Infos zu den Parametern erhält man durch Eingabe von
|
1 |
java -jar twflug.jar --help |
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 |
[main] DEBUG de.wenzlaff.twflug.TWFlug - Starte TWFlug ... usage: TWFlug -c,--copy-time <arg> copy time in Minuten (default: 60 Minuten) -d,--debug print debugging information (default: false) -dd,--ziel-datei <ziel-datei> destination file name (default: /home/pi/fhem/log/flugdaten-YYYY-MM.log) -dip,--ziel-ip <arg> ip adress for copy destination -dpsw,--ziel-passwort <arg> passwort from destination User -duser,--ziel-user <arg> destination User (default: pi -h,--help print help and exit -height,--window-height <arg> set window hight (default: 600) -i,--ip ip adress from DUMP1090 -k,--copy copy output file to destination (default: false) -max,--max-count <arg> set max count value (default: 50) -min,--min-count <arg> set min count value (default: 0) -n,--no-gui display no GUI. Only logfile output (default: false) -o,--outputfile <outputfile> use given file for DUMP output (default: flugdaten-YYYY-MM.log) -p,--port <arg> port from DUMP1090 (default: 30003) -r,--refresh-time <arg> refresh time in ms (default: 300000 ms = 5 Minuten) -v,--version print the version information and exit -width,--window-width <arg> set window with (default: 600) |
Weitere Anregungen, Bugs, Fix, Likes, Lob und Dank gerne als Kommentar hier auf der Seite.
Viel Spaß beim Planecounting.