Was ist los in EDDV?
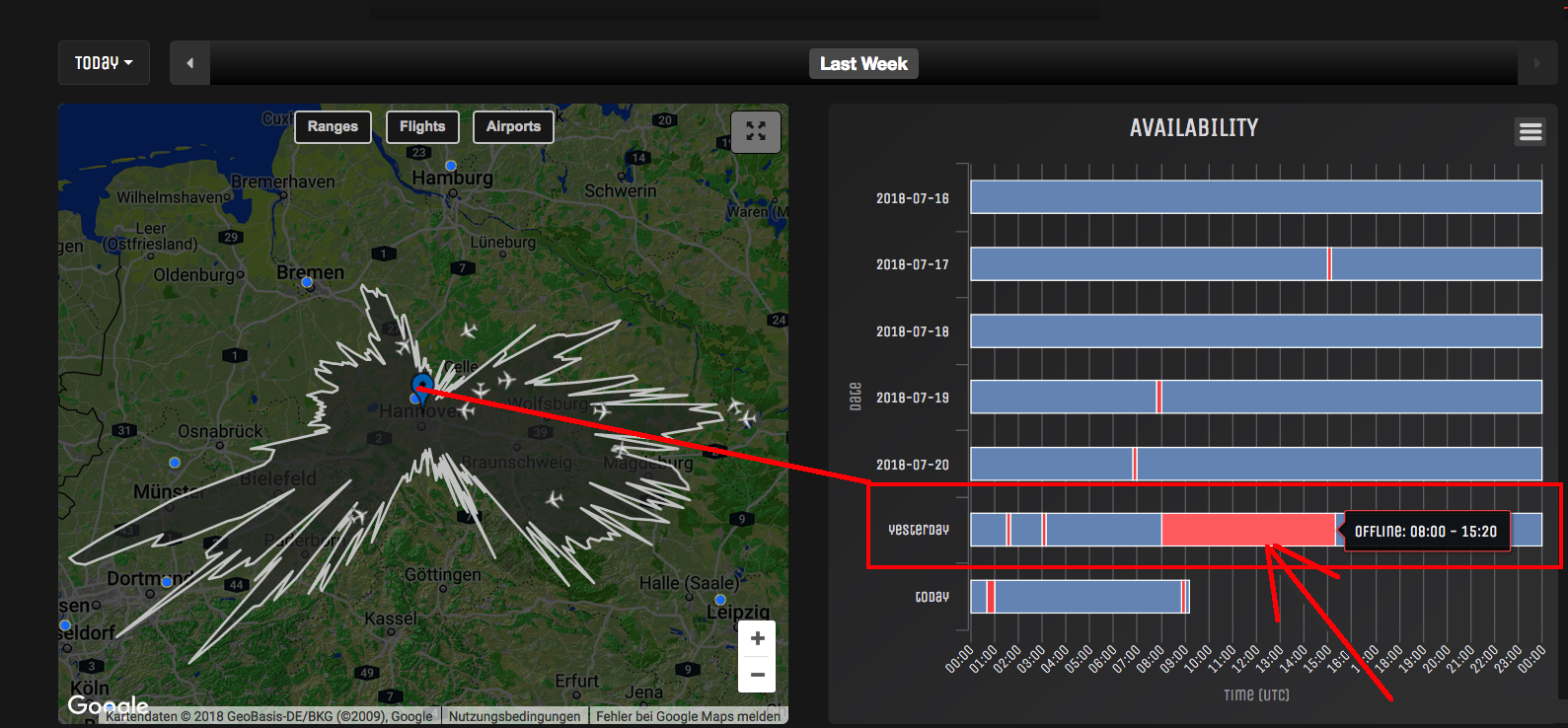
Da war wohl nur der Server offline, denn der PI läuft sein 182 Tagen ohne reboot:

Wenzlaff.de – Rund um die Programmierung
mit Java, Raspberry Pi, SDR, Linux, Arduino, Sicherheit, Blender, KI, Statistik, Krypto und Blockchain
Rund um das schöne Reisen.
Was ist los in EDDV?
Da war wohl nur der Server offline, denn der PI läuft sein 182 Tagen ohne reboot:
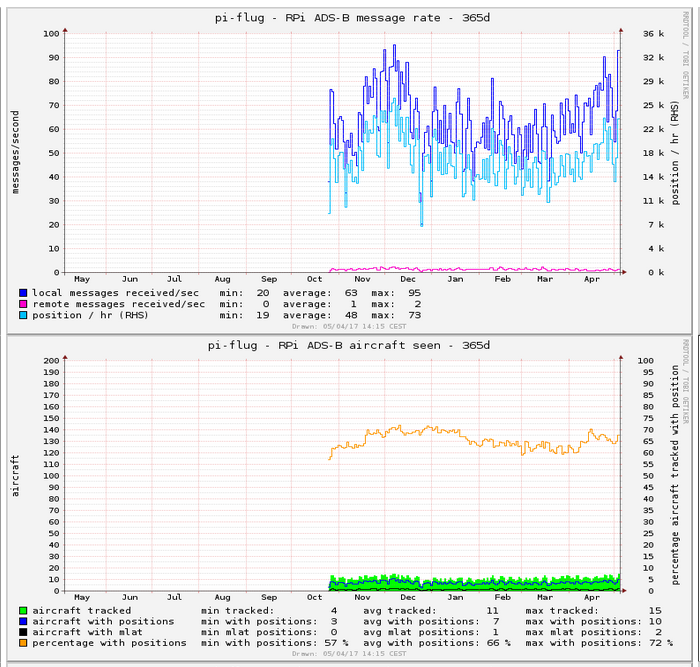
Durch das Staubsaugen ist mein Raspbery Pi Dump1090 down gegangen. Aber nach 6 Stunden habe ich es gemerkt. Da kann man auch an den gelben Bereich unten links sehen:
Dann mal gleich auf den aktuellen Stand bringen und fixen:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 |
wget http://flightaware.com/adsb/piaware/files/packages/pool/piaware/p/piaware-support/piaware-repository_3.5.3_all.deb sudo dpkg -i piaware-repository_3.5.3_all.deb sudo apt-get update sudo apt-get upgrade sudo apt-get install piaware piaware -v # Ergebnis 3.5.3 # Dann auch gleich dump1090-mutability_1.15~dev neu erstellen und installieren, # da es da auch im Mai einen Fix gab (https://github.com/mutability/dump1090/issues/232), den ich noch nicht hatte cd /home/pi/dump1090-mutability/dump1090 # eine neue Version holen in dem Verzeichnis git pull sudo dpkg-buildpackage -b cd .. sudo dpkg -i dump1090-mutability_1.15~dev_armhf.deb sudo /etc/init.d/dump1090-mutability restart |
Ok, es läuft wieder
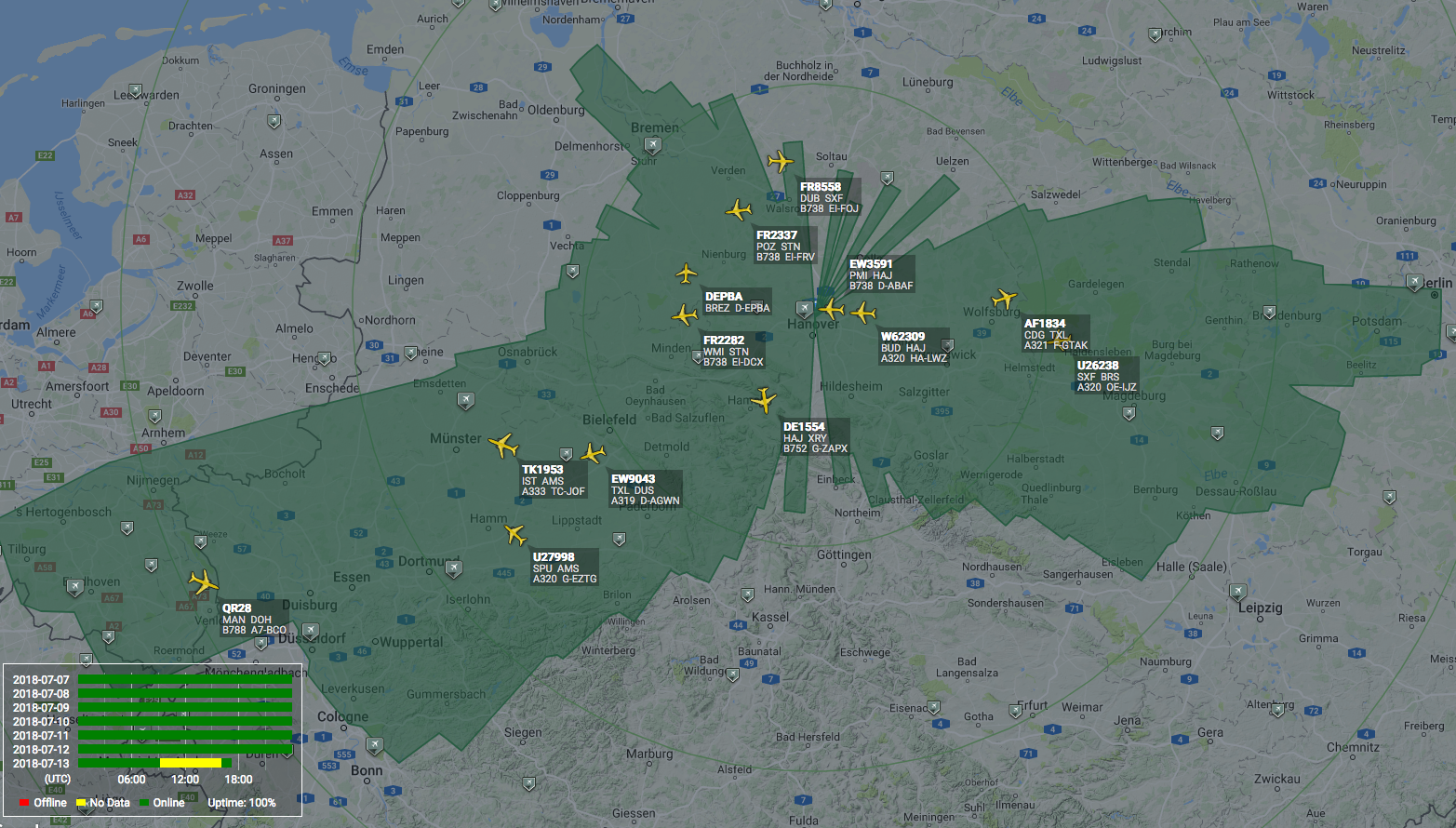
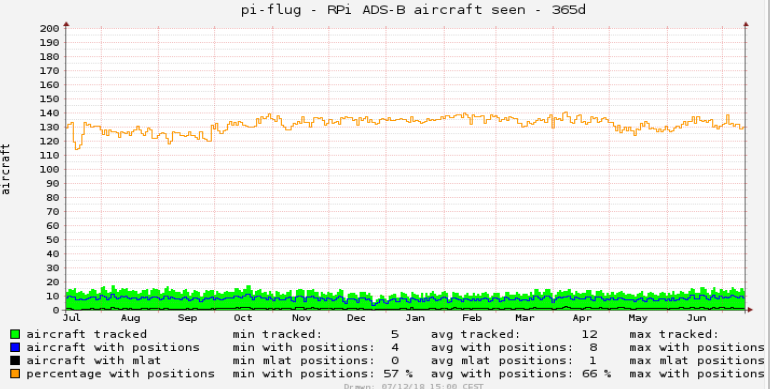
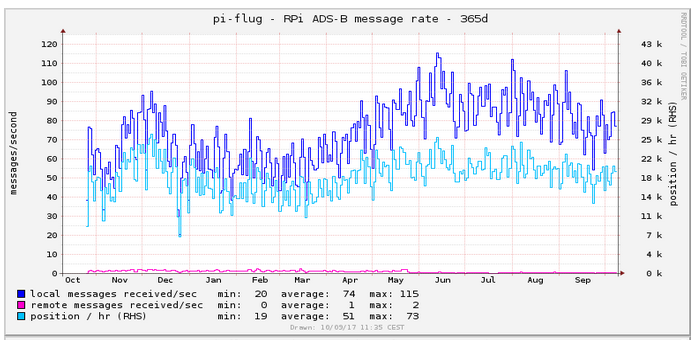
Zwischen Januar und Juni mit 2,76 Millionen Passagieren 7,8 Prozent mehr Menschen als im gleichen Zeitraum ein Jahr zuvor ldt. DPA. Wie sieht es im Moment in EDDV (HAJ) mit meinem Empfang aus?
Hier mal ein Jahr zurück:
 Und hier der Polar Plot von Heute: „Transponder DUMP1090 empfang mit Raspberry PI: Flughafen Hannover zieht positive Bilanz положительный баланс“ weiterlesen
Und hier der Polar Plot von Heute: „Transponder DUMP1090 empfang mit Raspberry PI: Flughafen Hannover zieht positive Bilanz положительный баланс“ weiterlesen
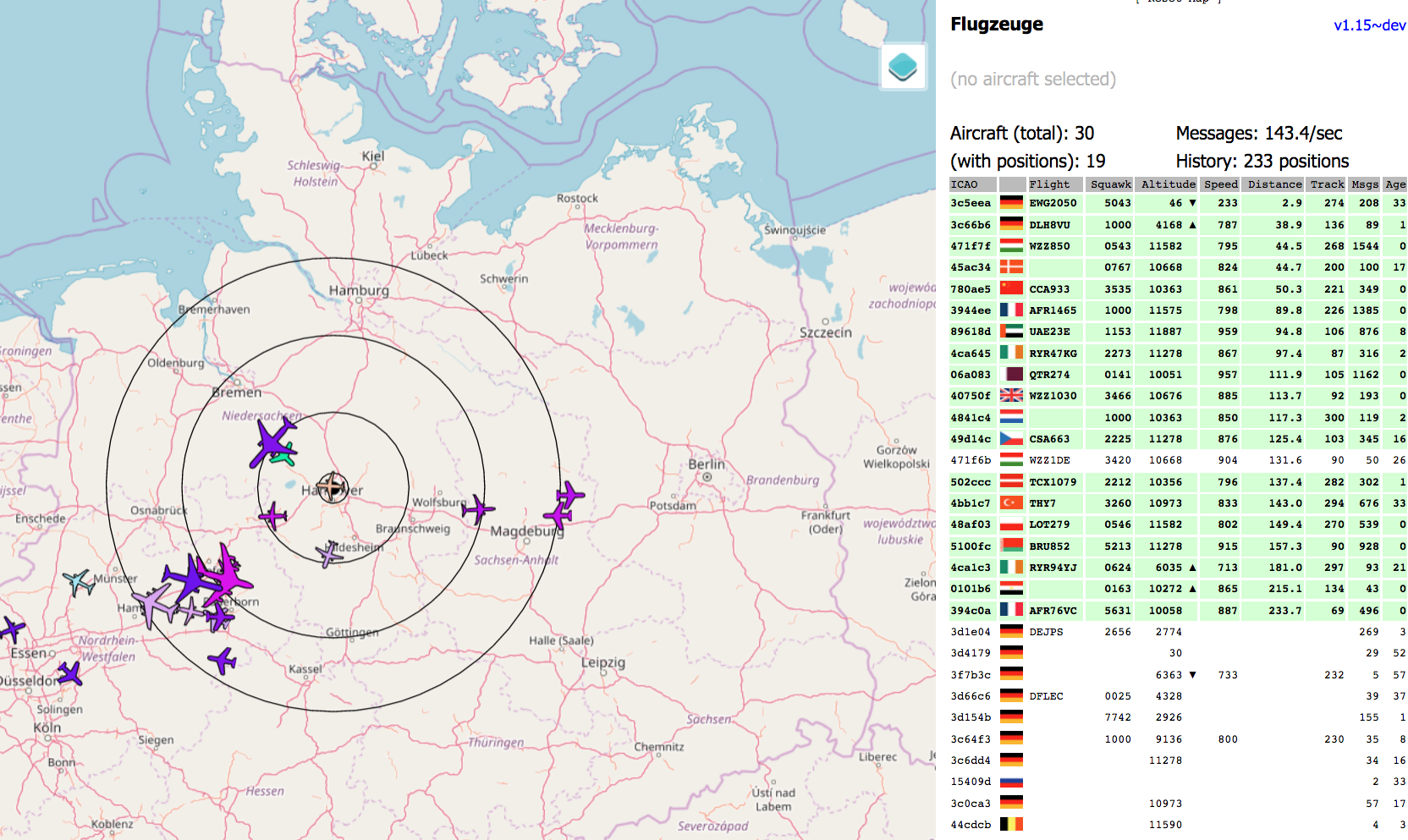
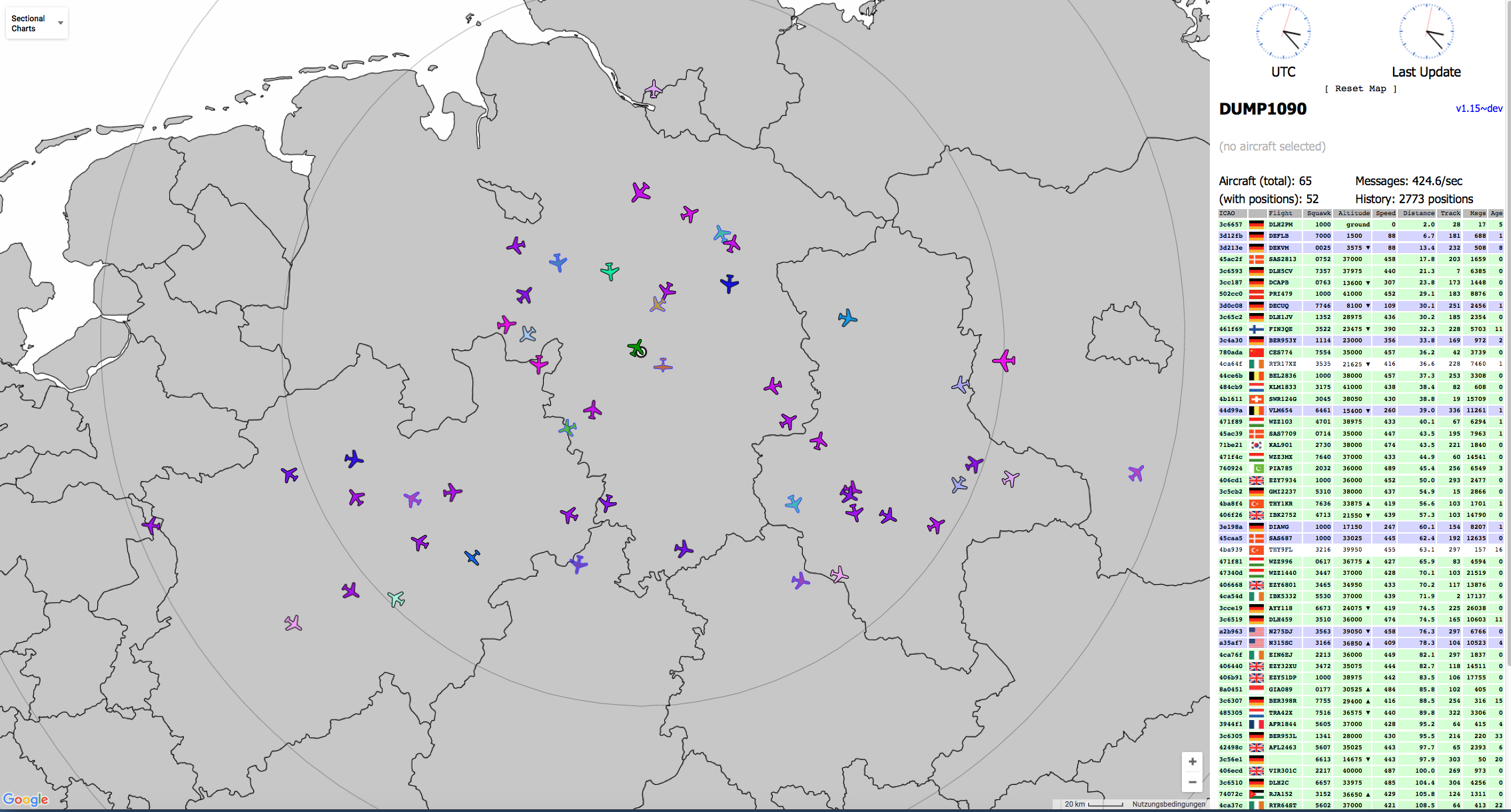
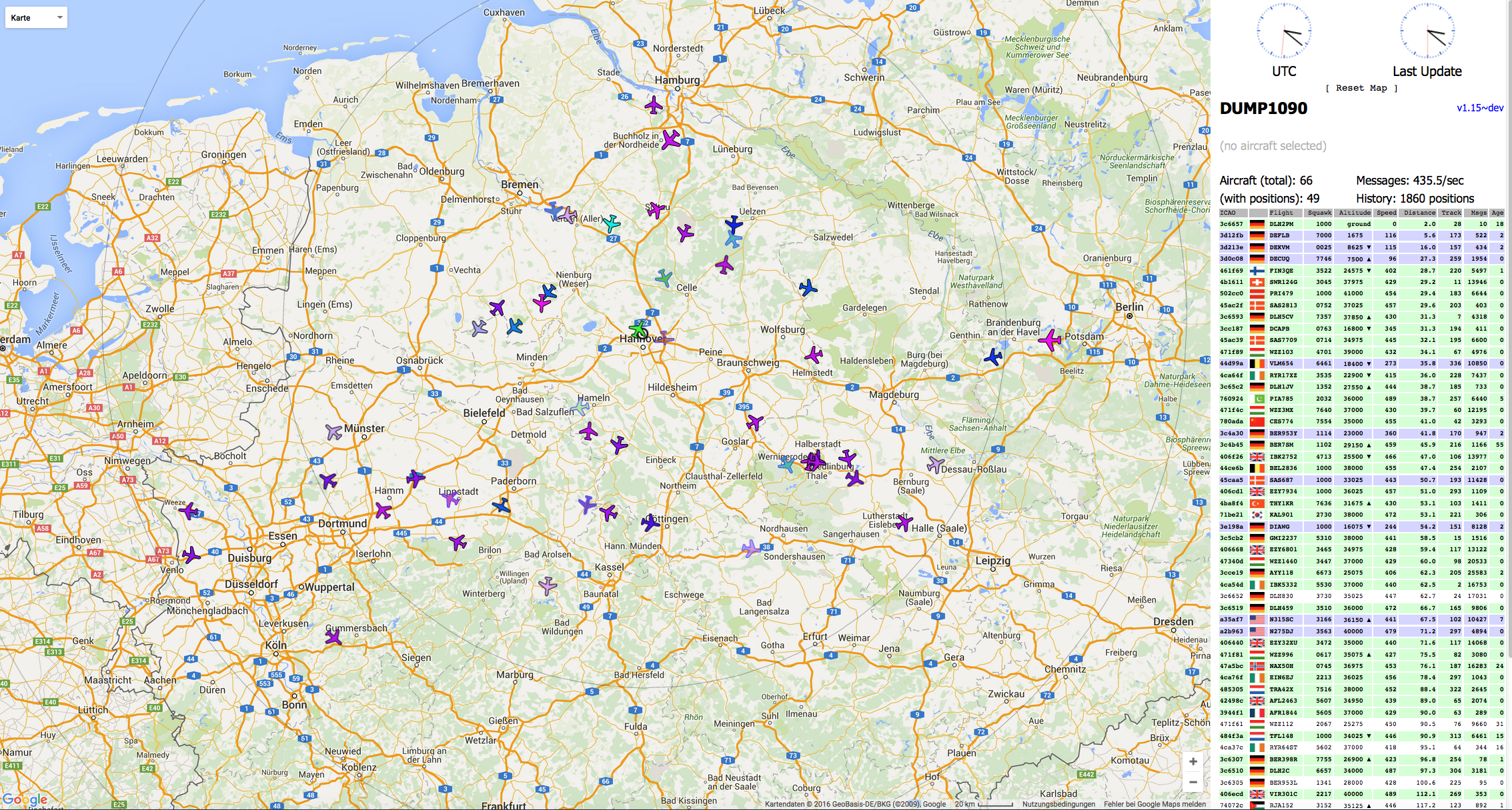
Über 50 Flugzeug-Transponder mit Raspberry Pi empfangen. Habe den Dipol mal nach drauße gehangen. Über 50 Transponder können empfangen werden
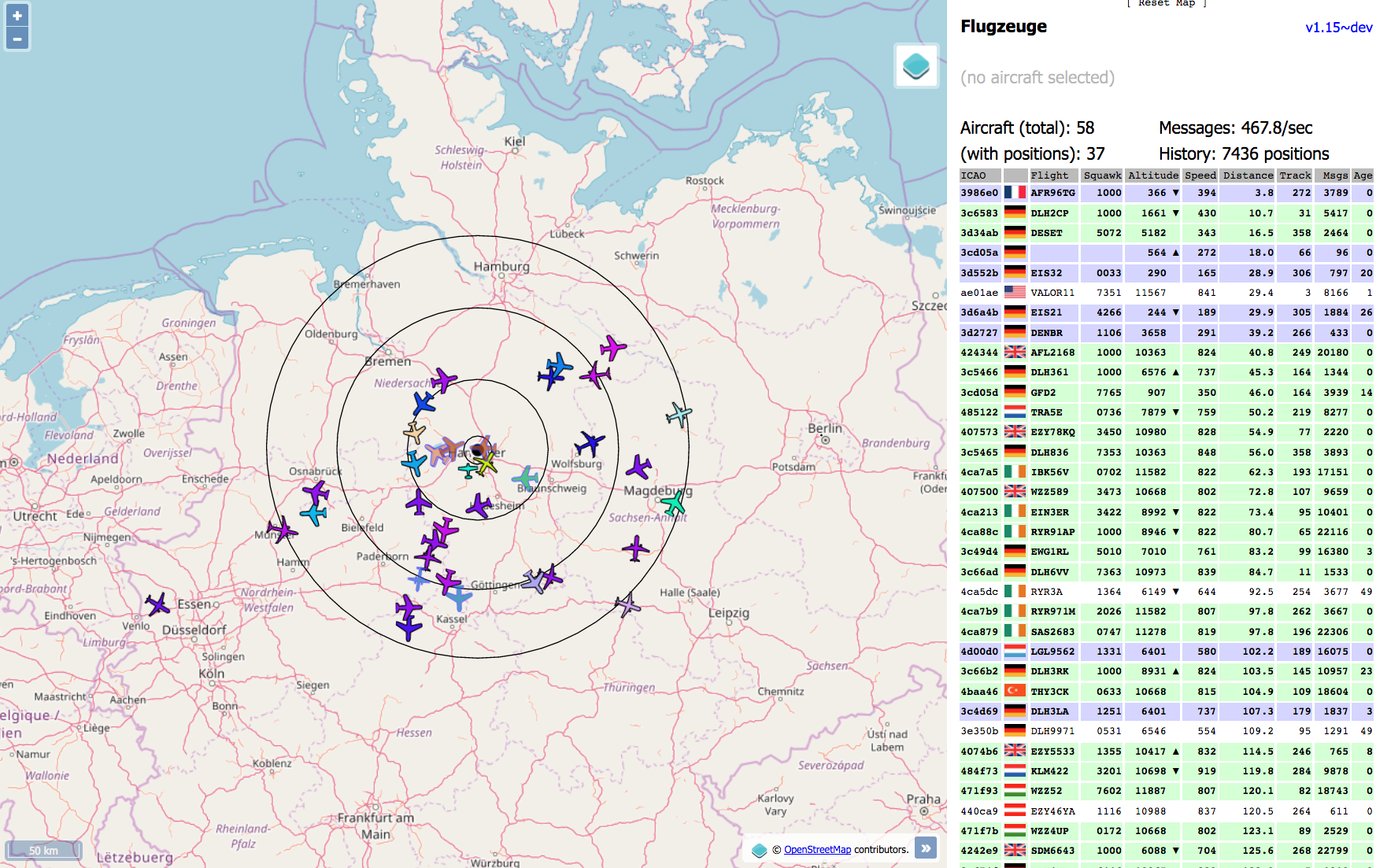 Bis Berlin „DUMP1090: Über 50 Flugzeug-Transponder mit Raspberry Pi empfangen“ weiterlesen
Bis Berlin „DUMP1090: Über 50 Flugzeug-Transponder mit Raspberry Pi empfangen“ weiterlesen
Habe heute zum erstenmal unter Port http:///(pi-Adresse):8754/ eine neue Seite von dem flightradar24 Feeder entdeckt. Wenn man die Seite öffnet werden die Einstellungen angezeigt:
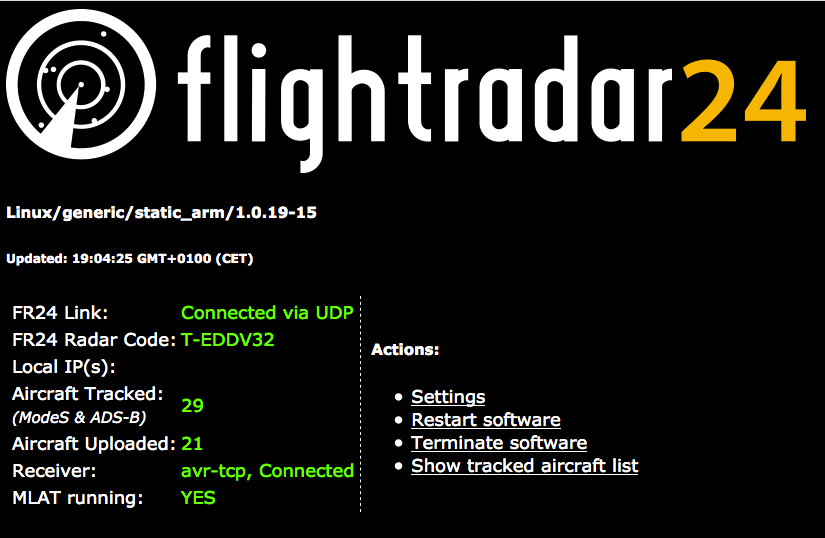
Klickt man auf Settings, könnte man sogar welche ändern: „Beluga Airbus A300 mit Raspberry Pi getrackt view via Settingssite von flightradar24 Feeder (dump1090)“ weiterlesen
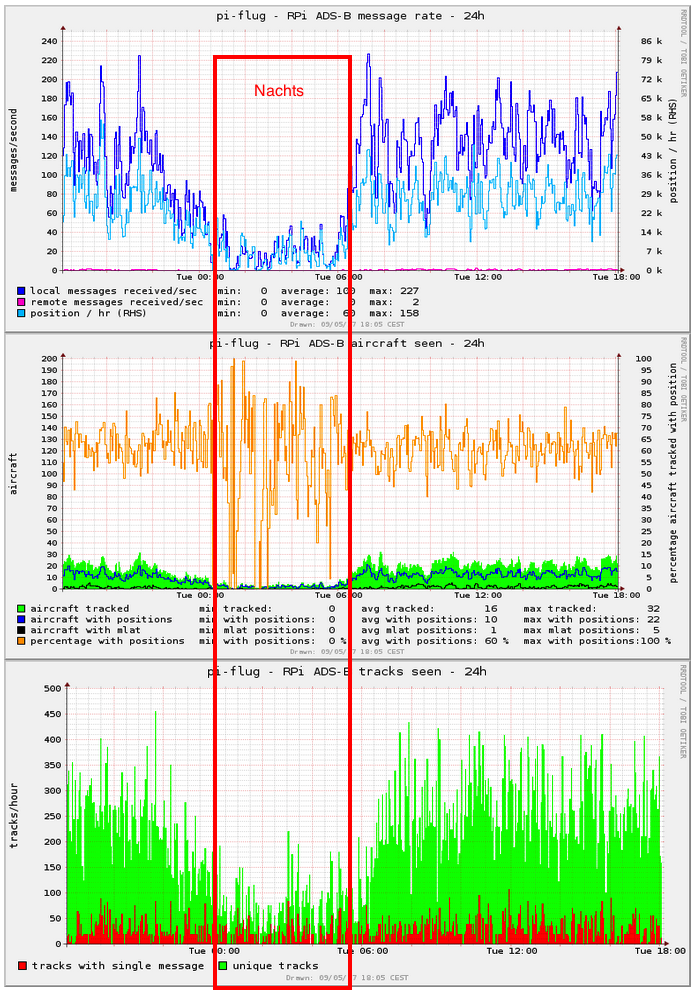
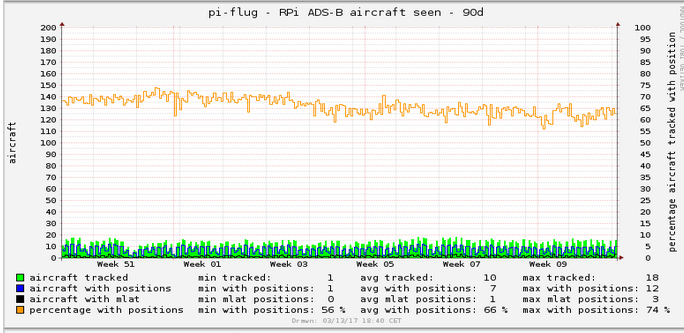
So jeweils 130 Flugzeuge am Tag mit ADS-B empfangen:
 „Das war 2017 der ADS-B Empfang in Hannover (EDDV, HAJ) mit einem Raspberry Pi.“ weiterlesen
„Das war 2017 der ADS-B Empfang in Hannover (EDDV, HAJ) mit einem Raspberry Pi.“ weiterlesen
Eben ist der Flug CFG605 in Hannover gelandet. Es ist eine Condor A321 aus Antalya (AYT) mit 36 Minuten Verpätung. Intressant ist das Höhenprofile:

Oder hier mit Karte:

Die Höhe liegt bei 732 m auf der Höhe der A7. „Anflug auf Hannover (EDDV, HAJ) mit Höhendiagramm eines A321 (CFG605) aus der تركيا“ weiterlesen
Ende Oktober habe ich die Flugdaten in Hannover mit dem Raspberry Pi und Dump1090 ein Jahr lang in meine Datenbank geschrieben. Der Rasberry Pi läuft nun über ein Jahr ohne zu booten bzw. abzustürzen, wie ein uptime zeigt:

Hier mal ein Jahresüberlblick, noch mit Air Berlin
Habe auch noch ein Foto von mir aus Hannover, da hier von der Zeit nur eins aus Düsseldorf abgebildet ist:

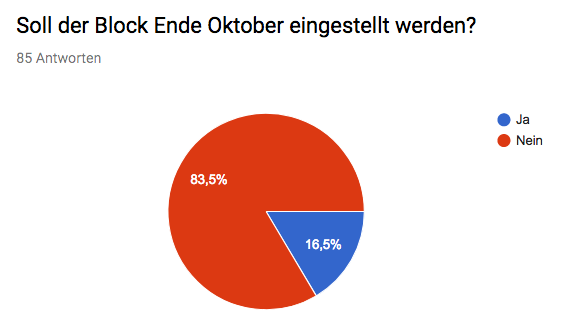
Soll ich diesen Block zu diesem Thema auch Ende Oktober einstellen? Eure Meinung, gern in diesem Google-Formular eingeben und auf Senden klicken, das Ergebniss werde ich dann hier veröffentlichen.
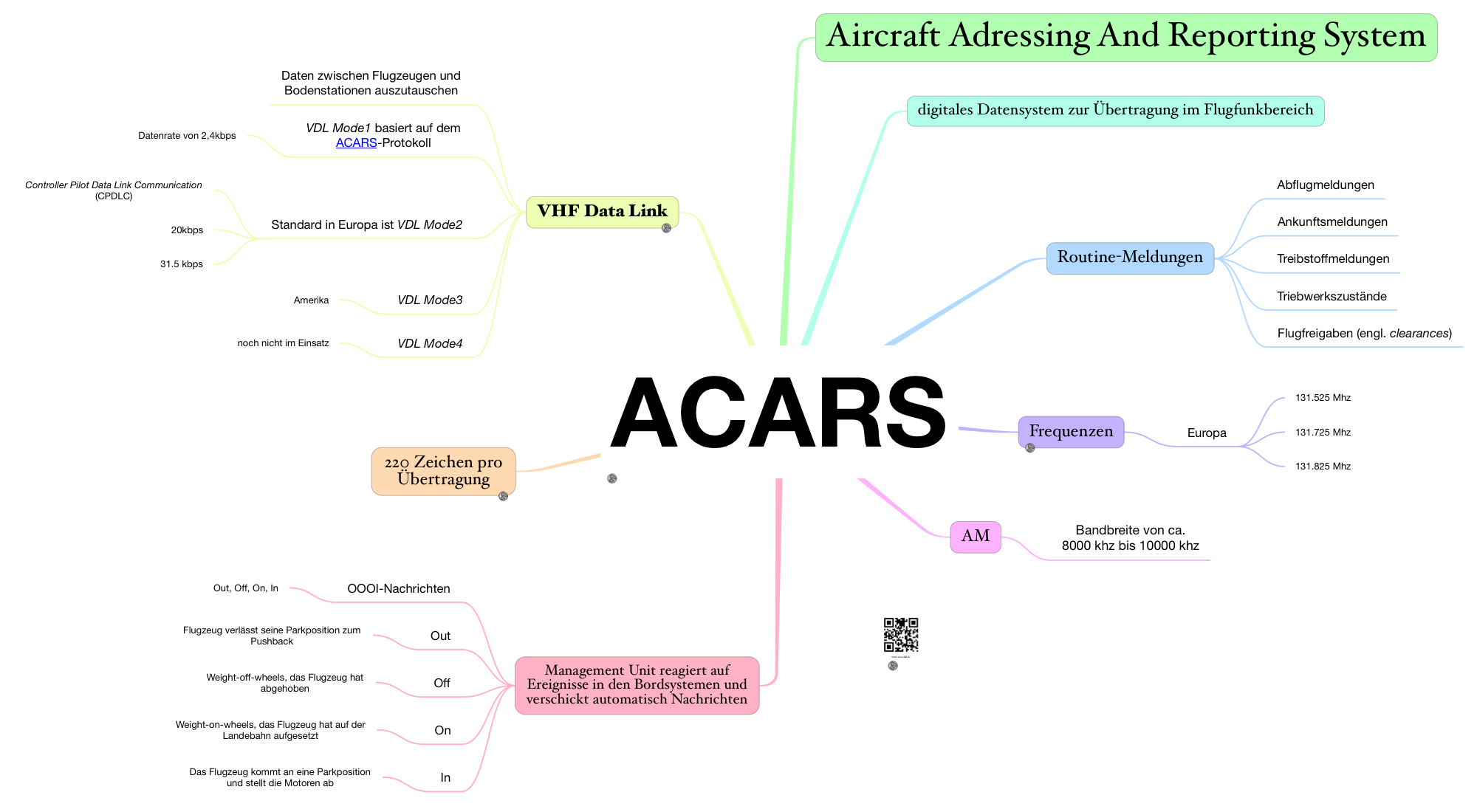
Wer wie hier beschrieben ACARS Meldungen empfangen will, kann sie mit dem acarsserv Server auch in eine DB speichern. Dazu muss der acarsserv wie folgt compiliert und gestartet werden. Das holen des Quellcodes aus Git habe ich in diesen Blogeintrag beschrieben, und ist Vorraussetzung für das erstellen des Servers.
|
1 2 3 4 5 6 7 8 9 |
# Abhängigkeiten der DB installieren sudo apt-get install libsqlite3-dev sqlite3 sqlite # Server erstellen # make acarsserv jetzt make -f Makefile.air acarsserv # starten des Servers im Hintergrund mit ./acarsdec & # Starten mit Daten in die DB und auf der Konsole: ./acarsdec/acarsdec -N 10.10.10.25:5555 -p -0 -r 0 131.725 131.850 |
Es gibt vom Flughafen Hannover (HAJ, EDDV) eine sehr gute Seite um den Fluglärm anzuschauen. Es gibt acht Messstationen die den Lärm in db(A) anzeigen. Auch mit guter History die man bis zu 25 Mal schneller abspielen kann. Die aktuellen Werte sind 20 Minuten zeitversetzt. Die Grünen Punkte sind die Messstationen:
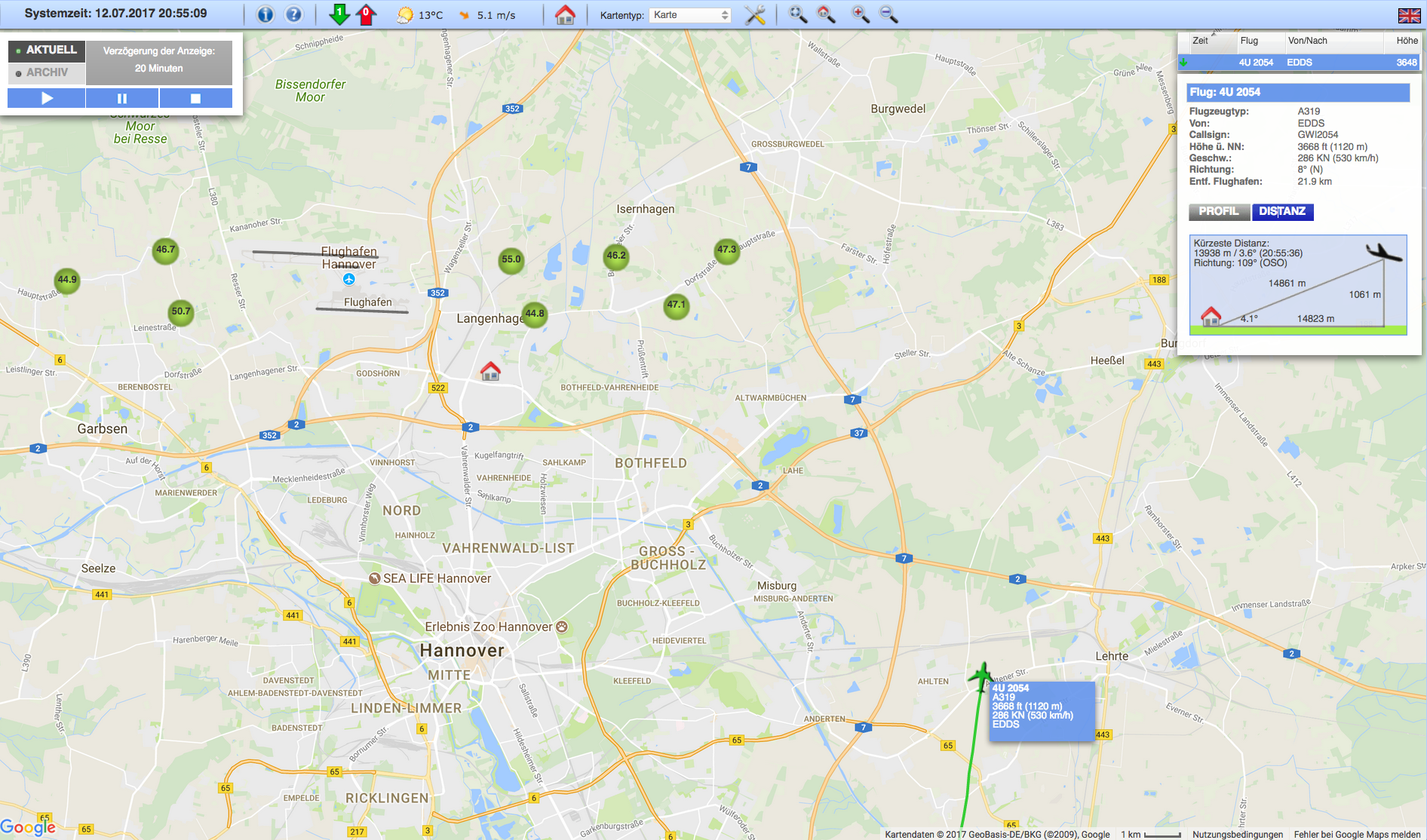
Das jeweilige Diagramm wird oben links angezeigt, wenn man ein Flugzeug mit der Maus selektiert hat.

Hier noch ein paar Einstellungen: „Fluglärm Visualisierung in Hannover und Frankfurt“ weiterlesen
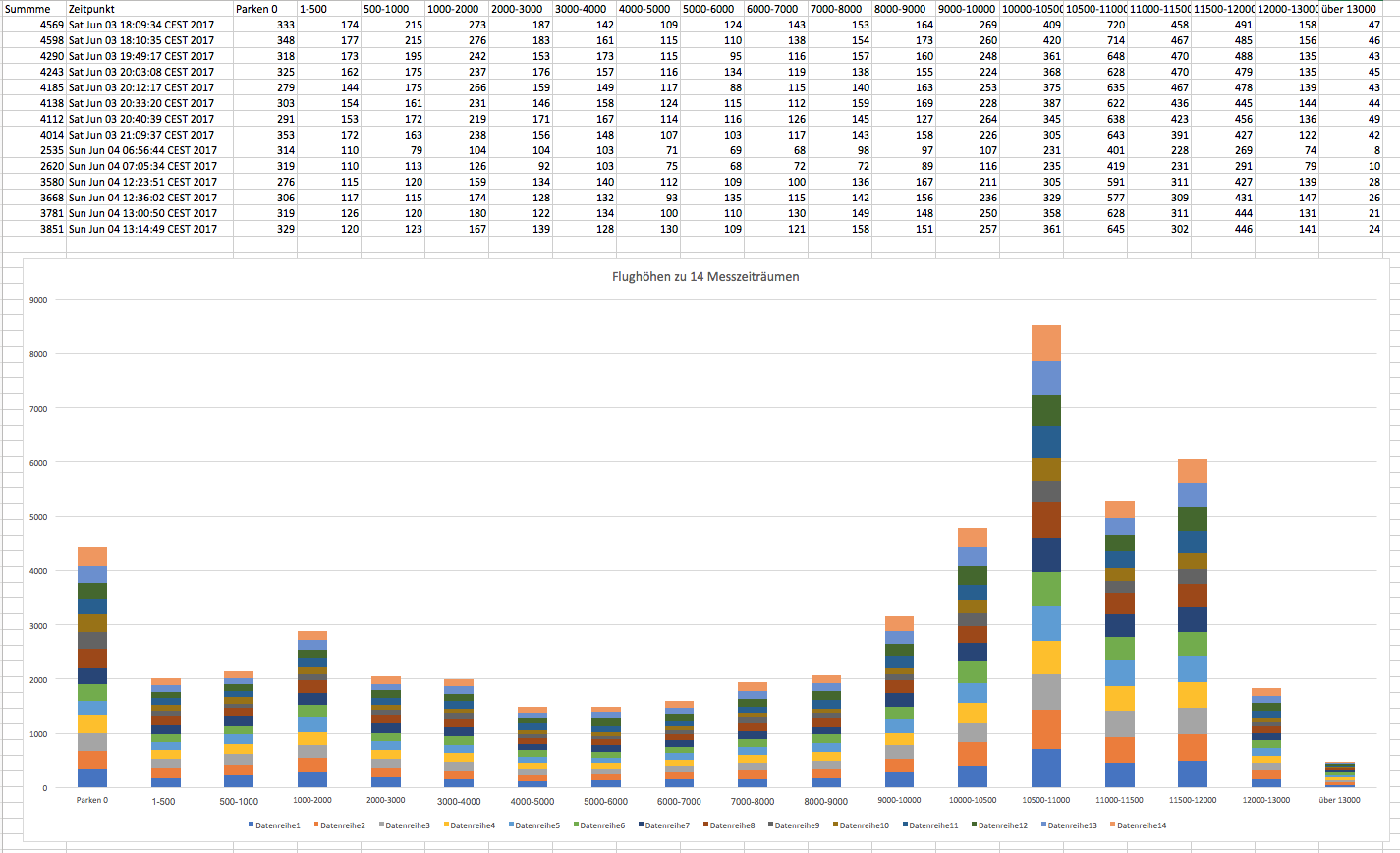
Anzahl Flugzeuge weltweit. Hier die über The OpenSky Network, http://www.opensky-network.org empfangenen Flugzeuge an zufälligen Messzeitpunkten.
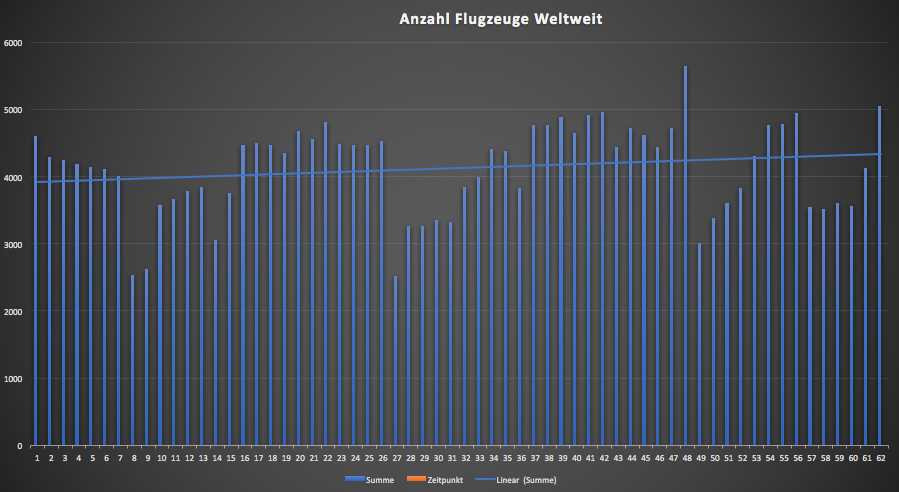
Die Datenbasis: „Anzahl Flugzeuge weltweit – (Tendenz steigend) – Aktuell 5055“ weiterlesen
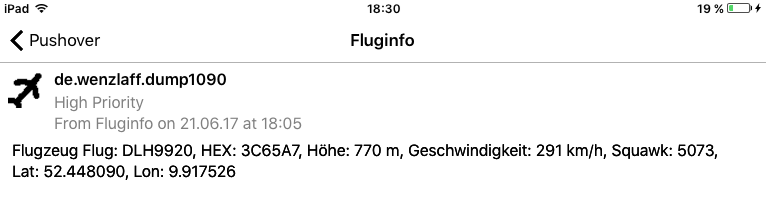
Gerade eine Pushover Nachricht bekommen, das ein A380 in Hannover landet.
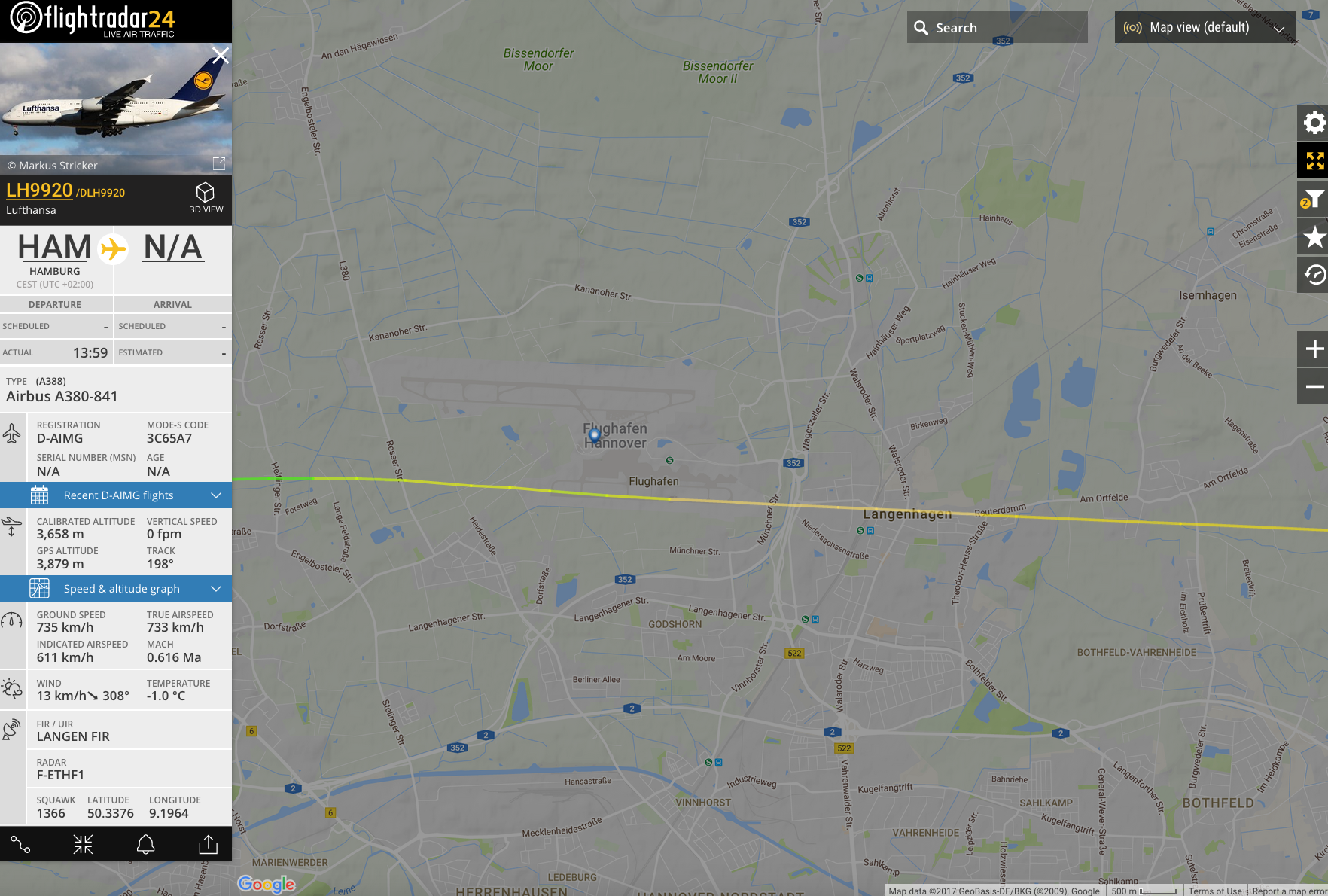
Der ist bei uns am Küchenfenster vorbei, und dann in Hannover gleich wieder durchgestartet, wie man hier gut sehen kann:
Kommt ursprünglich aus Hamburg, und hat einige Testschleifen hinter sich:
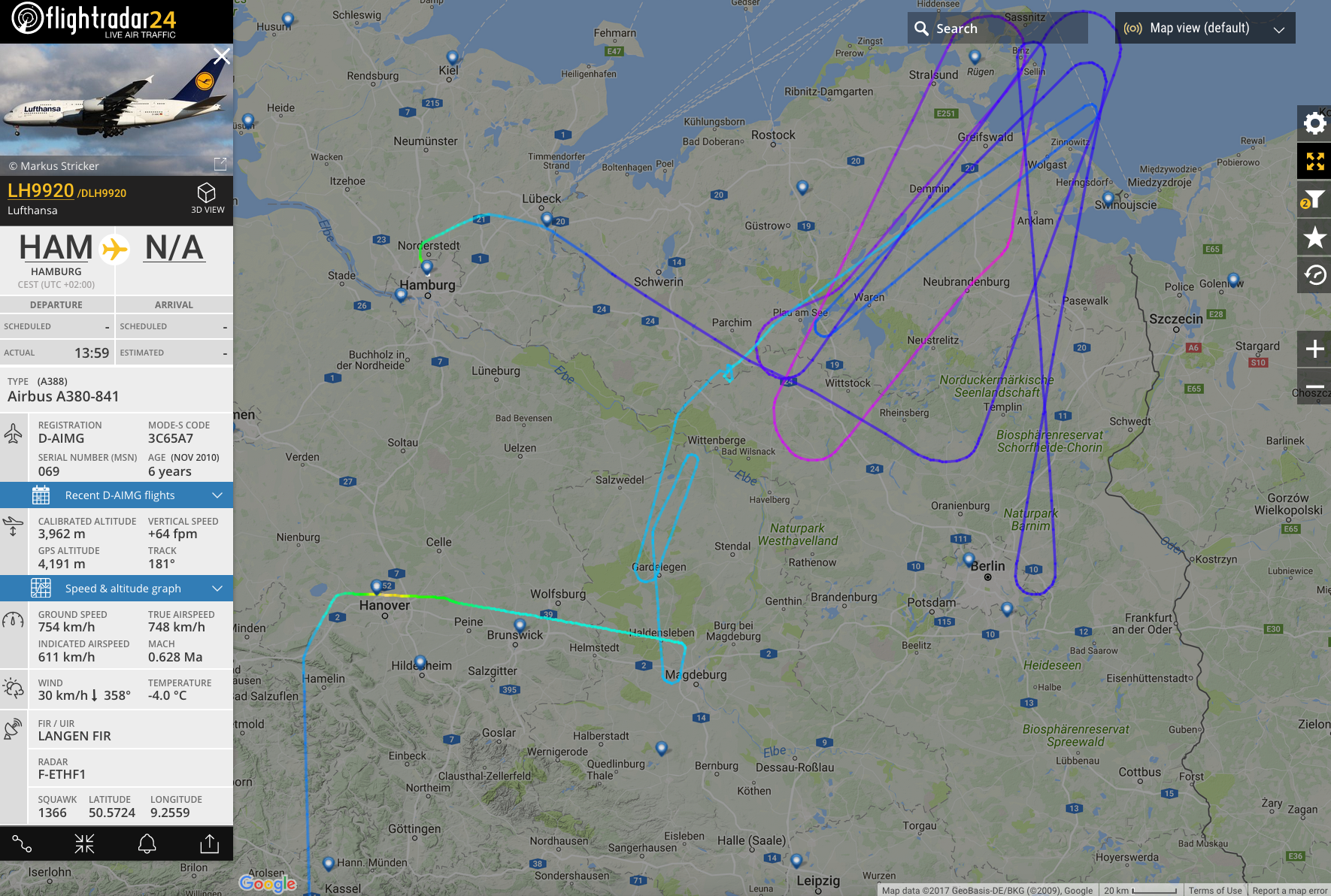
Der 6 Jahre alte A-380 ist nun in Frankfurt gelandet, mal sehen wo es hingeht bei der Wärme … mit amtlichen 25,5 Grad C und PM10 von 9 µg/m3 in HAJ.
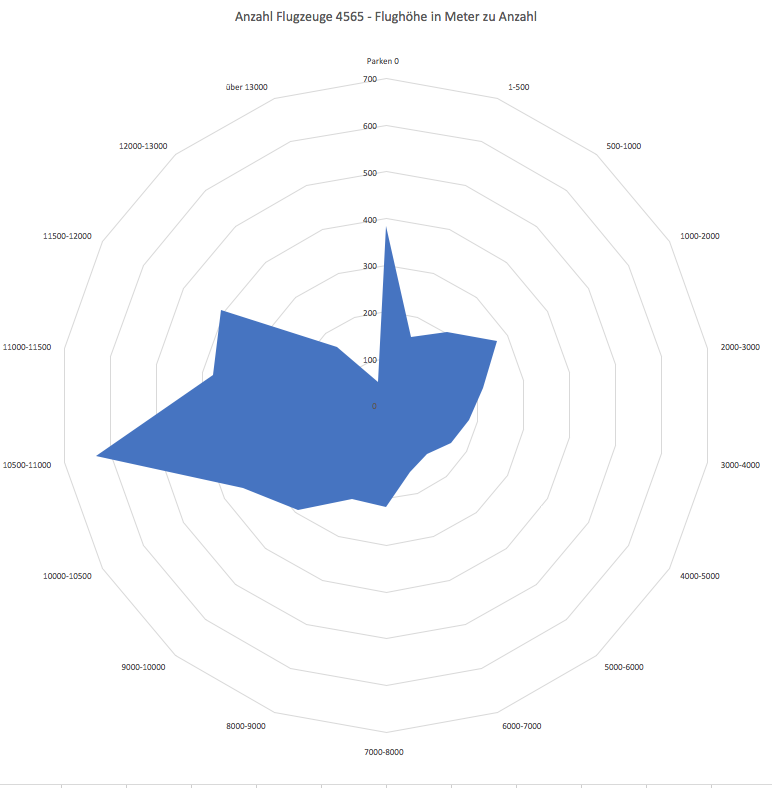
Hier mal wieder eine Flughöhenanalyse mit Raspberry Pi und DUMP1090. Hier auf dem Blog hatte ich ja schon beschrieben, wie es mit Java über OpenSky erzeugt werden kann.
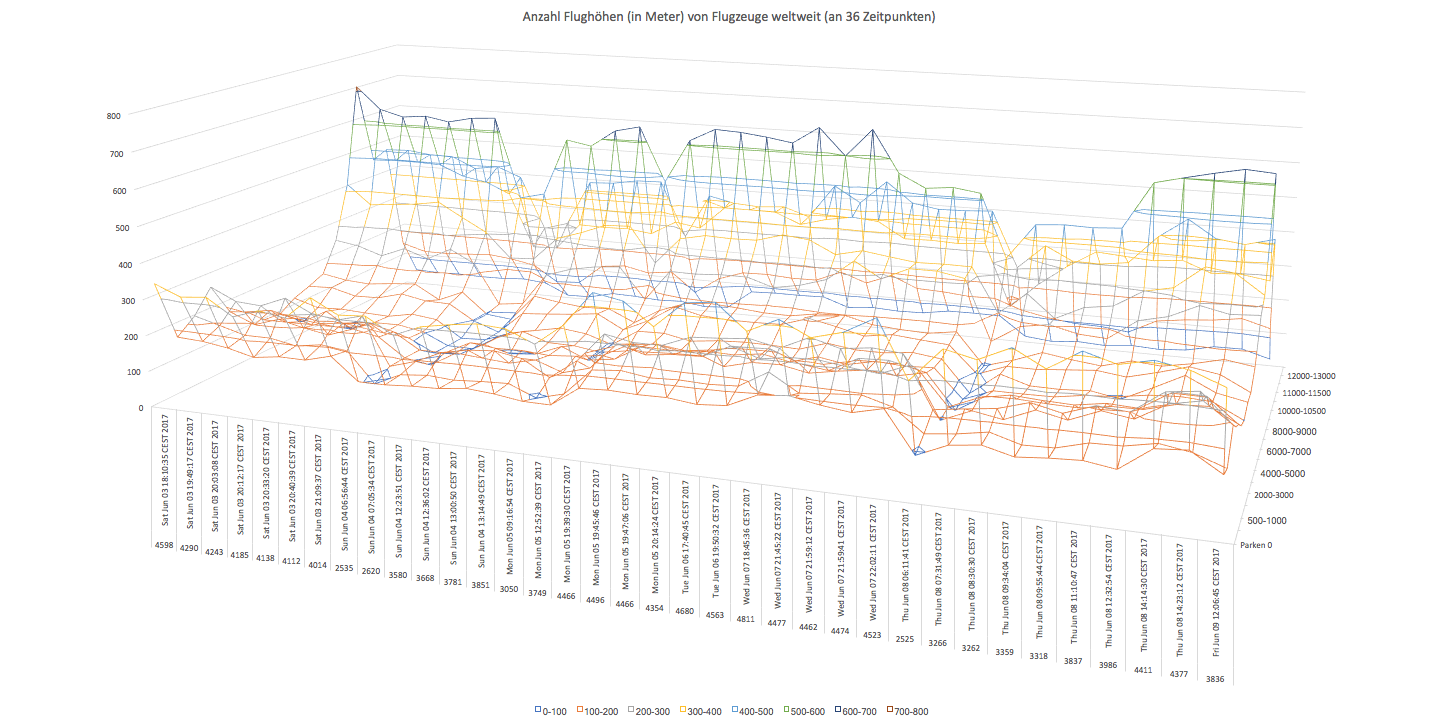
Hier die Datenbasis „Flughöhenanalyse mit Raspberry Pi und DUMP1090“ weiterlesen
In welcher Höhe fliegen jetzt die meisten Flugzeuge?
 „In welcher Höhe fliegen jetzt die meisten Flugzeuge?“ weiterlesen
„In welcher Höhe fliegen jetzt die meisten Flugzeuge?“ weiterlesen
Mich hat mal die Frage interessiert, in welcher Höhe die meisten Flugzeuge aktuell so fliegen.
Also habe ich mal ein kleines Java Programm geschrieben, welches in Echtzeit die Daten von The OpenSky Network abfragen kann. Es werden also mal alle Flugzeuge die Transponser haben und von The OpenSky Network erfasst sind berücksichtigt.
Hier das Ergebnis von 3048 Flugzeugen:
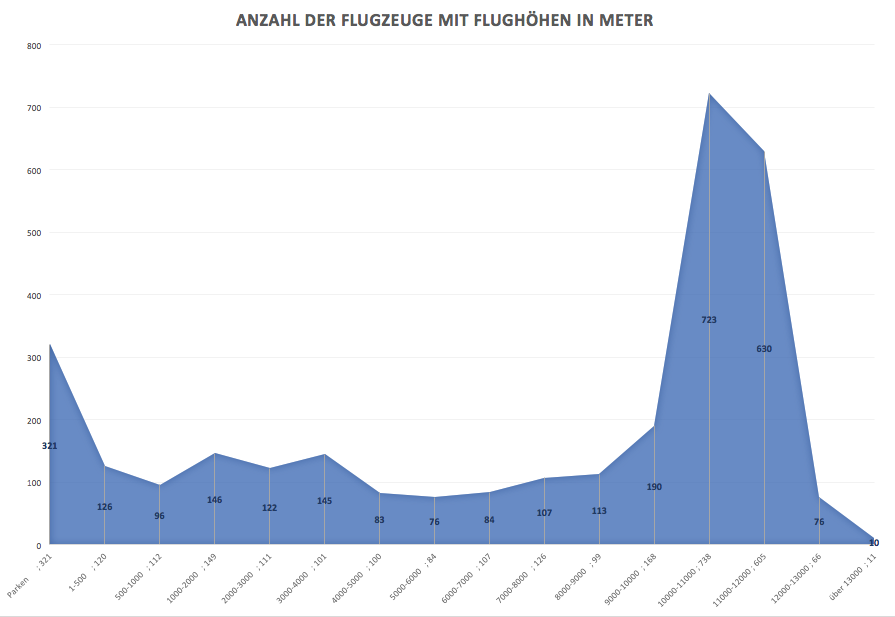
Das ist die vom Programm ermittelte Datenbasis: „In welcher Höhe fliegen Flugzeuge?“ weiterlesen
OpenSky bietet eine Java API an um auf Flugdaten zugreifen zu können. Da die live API nun wieder online ist, schreiben wir einen kleine JUnit Test und formen mal alle Transponderdaten aller 4754 Flugzeuge in eine KML Datei, um die Daten auf Google Earth anzuzeigen. Hier erst einmal das Ergebnis in Google Earth aus 5569 Km Höhe gesehen:

Wer die die Daten testweise laden will, „OpenSky Java API to KML für Google Earth – Teil 1“ weiterlesen
Wie oben links in dem Kasten zu sehen, sind die Transponder Daten die mein Raspberry Pi sendet jetzt auf Platz 19 in Deutschland und Weltweit auf 414. Und das mit einer Zimmerantenne:
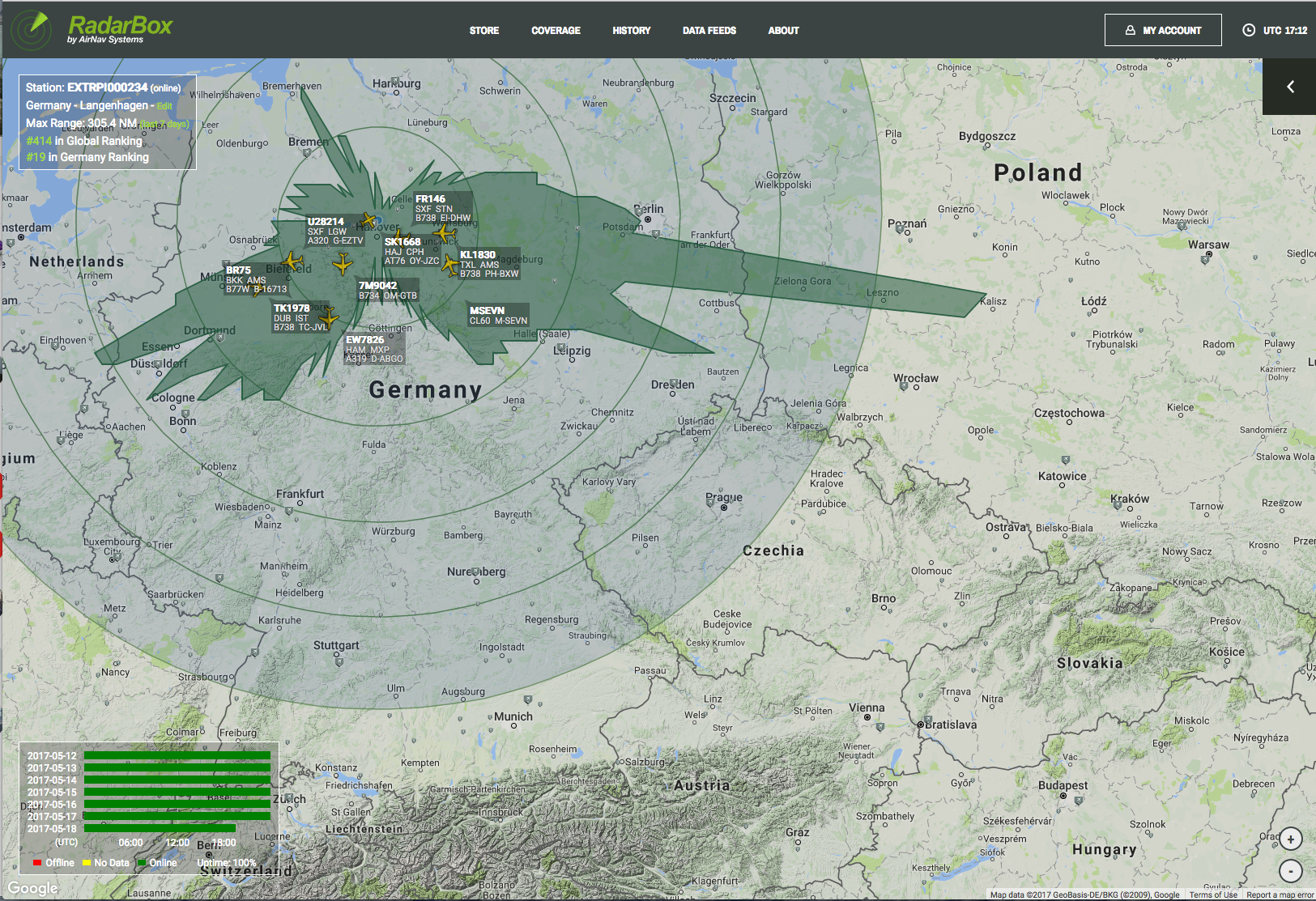 „RaspberryPi Transponder Feed zu RadarBox jetzt auf Platz 19 in Deutschland und Platz 414 in der Welt“ weiterlesen
„RaspberryPi Transponder Feed zu RadarBox jetzt auf Platz 19 in Deutschland und Platz 414 in der Welt“ weiterlesen
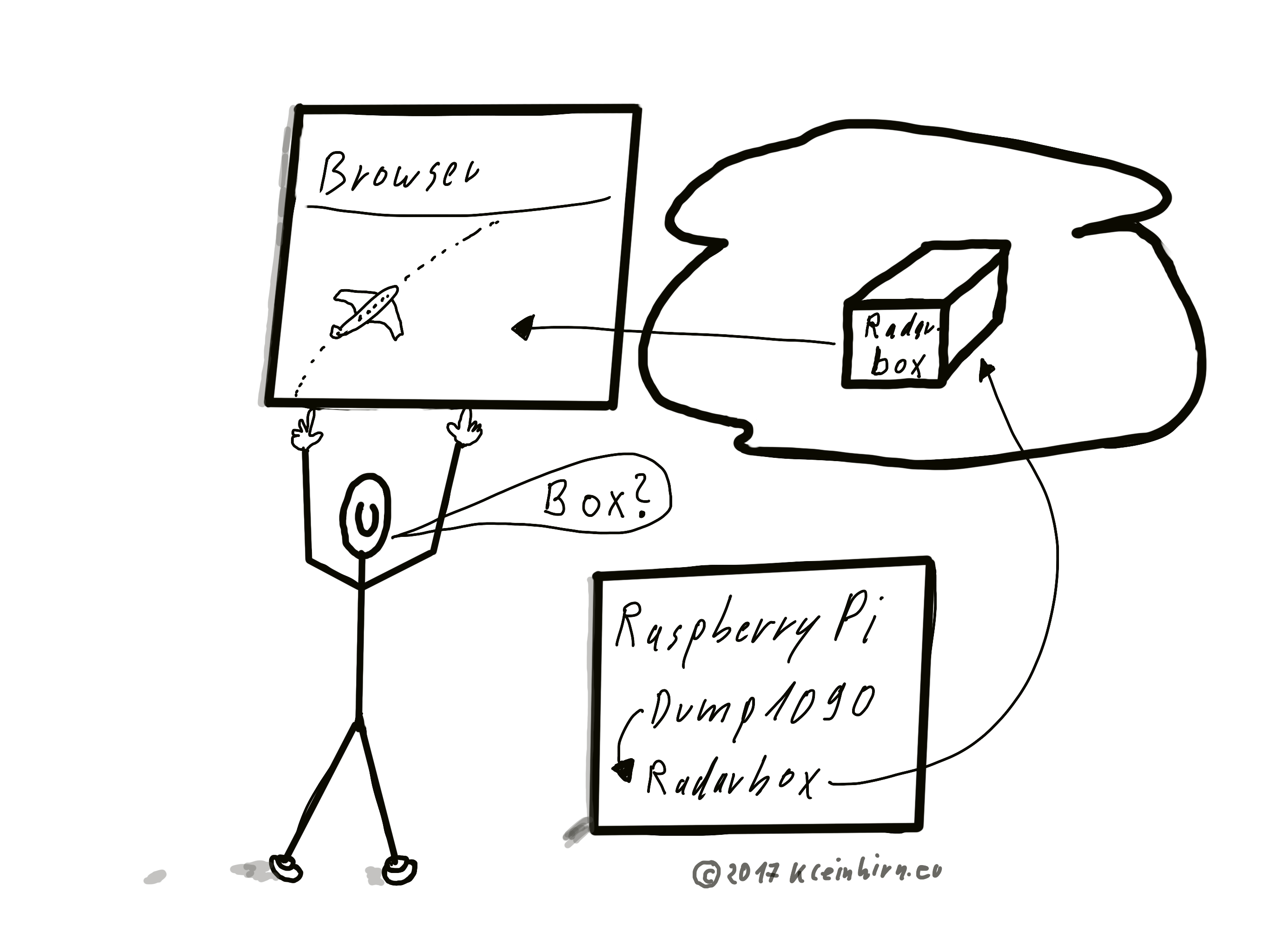
Wer auf dem Raspberry Pi einen DUMP1090 laufen hat, kann seine Daten zu https://www.radarbox24.com senden. Das ist in ein paar Minuten installiert, da es ein Install-Script und einen Feeder von Radarbox24 gibt.
Zuerst legt man sich bei Radarbox24 einen Account an.
Dann müssen folgende Befehle auf der Konsole eingegeben werden: „Wie werden Flugdaten von Dump1090 an RadarBox24.com gesendet?“ weiterlesen
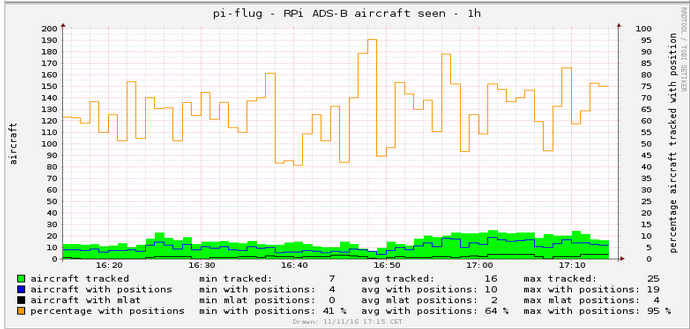
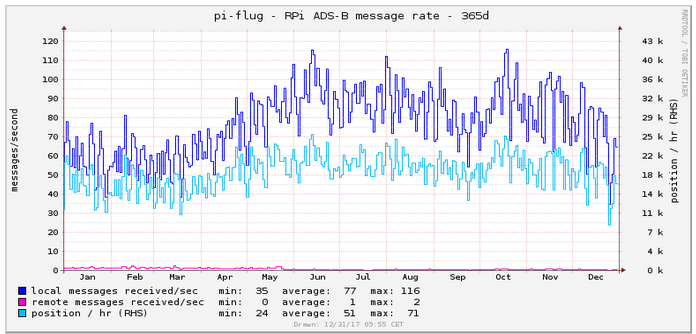
Wie habe ich diese Grafik erstellt? „Was empfängt der Raspberry Pi so in der letzten Stunden in Hannover?“ weiterlesen
Wer schöne Grafiken zum Thema Flug-Transponder-Empfang erstellen will, kann das sehr einfach machen. Es werden dann im Browser, z.B. solche Diagramme angezeigt:

Es gibt ein gutes Install-Script (Thanks Ted Sluis) mit dem geht die Installation auf einem Raspberry Pi Debian Jessie sehr einfach. Auch ein Install-Video ist auf der Seite zu finden.
Einfach diese Befehle absetzen: „Raspberry Pi Flugstatistik mit collectd, rrd und dump1090-tool“ weiterlesen

Normalerweise habe ich die Antenne drinnen. Da es heute aber so schön ist, wird sie mal draußen angebracht

und schon ist der Empfang fast doppelt so groß und fast 300 Km weit:
oder hier
Hier auf Twitter kann jeder in Echtzeit mit 5 Minuten Verzögerung die Anzahl ablesen, da ein Raspberry Pi über node-red die Ergebnisse postet:
Anzahl #Flugzeuge in #Hannover (#HAJ #EDDV) 51 angefragt per #ADSB am Sat Jun 04 2016 17:26:28 GMT+0200 (CEST) per #Raspberry #Pi
— Thomas Wenzlaff (@twusb) 4. Juni 2016
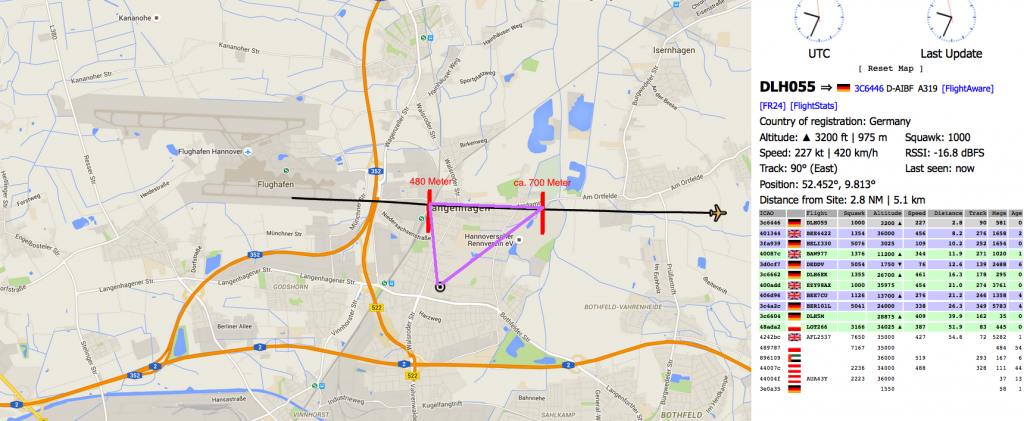
Bei mir im Zimmer sind die startenden Flugzeuge ca. 2 Minuten hörbar, aber nur wenn das Fenster offen ist. Den Start und Endepunkt habe ich mal eingezeichnet:
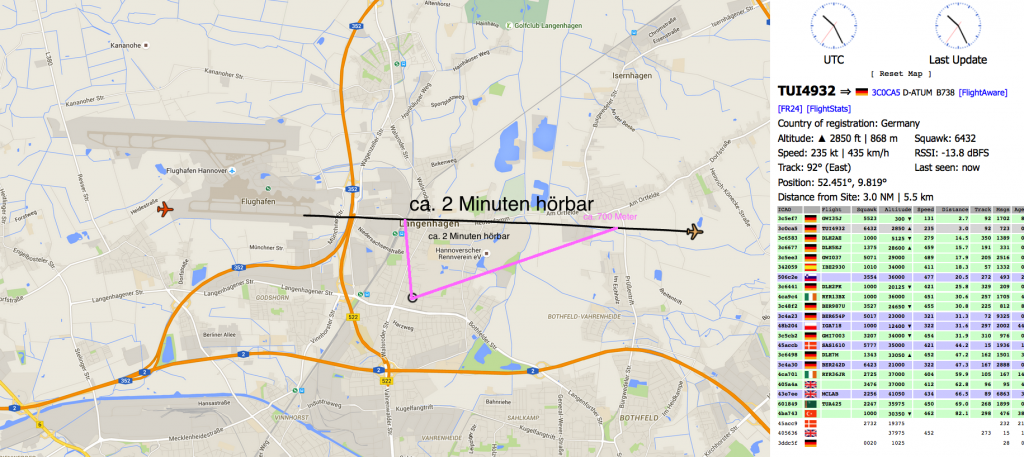
Die Höhe geht so von 400 Meter bis 700 Meter.
Meine Hausautomatisation die auf einen Raspberry Pi mit Debian Linux läuft, arbeitet mit Openhab.
Wie können da nun die Transpondersignale von den Flugzeugen in Hannover (EDDV) angezeigt werden?
Das geht mit der REST Schnitstelle von ThinkSpeak.
So sieht die Seite von Openhab aus.
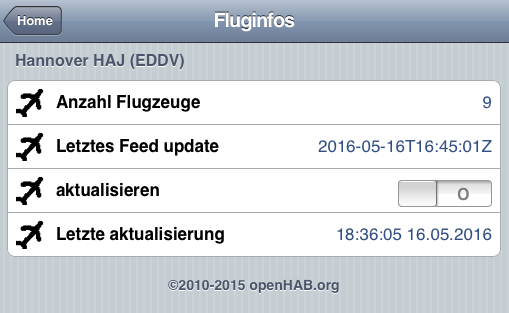
Oben wird die aktuelle Anzahl von Flugzeugen und der Zeitpunkt der Daten die gerade empfangen werden angezeigt. Eine automatisch Aktualisierung ist bei mir auf 15 Minuten eingestellt. Der Feed wird alle 5 Minuten aktualisiert und wenn man die letzten Daten angezeigt bekommen will, braucht man nur auf den „aktualisieren“ Schalter klicken.
Die Daten kann jeder abfragen, da die API von ThinkSpeak öffentlich ist!
Was ist nötig?
Ein Eintrag in der Sitemap Datei:
|
1 2 3 4 5 6 7 8 9 10 11 |
Frame { Group item=gFlug label="Fluginfos" icon="flugzeug"{ Frame label="Hannover HAJ (EDDV)" { Text item=flugzeugeAnzahl icon="flugzeug" Text item=flugzeugeUpdate icon="flugzeug" Switch item=flugzeugeAktualisieren icon="flugzeug" Text item=flugzeugeZeitpunkt icon="flugzeug" } } } |
Eine neue Datei im Items Verzeichnis Flug.items mit diesm Inhalt:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 |
// // Steuerung des Fluginformationen via OpenHAB // // (c) 2016 Thomas Wenzlaff http://www.wenzlaff.info // // Liefert aus den Feed die Anzahl Flugzeuge als Json Feed // https://api.thingspeak.com/channels/44177/feeds/last.json // // z.B. // {"created_at":"2016-05-16T14:05:02Z","entry_id":80051,"field1":"15"} Group gFlug // alle 15 Minuten abfragen String flugzeugeAnzahl "Anzahl Flugzeuge [%s]" { http="<[https://api.thingspeak.com/channels/44177/feeds/last.json:900000:JS(getAnzahlFlugzeuge.js)]" } // Zeitpunkt der letzten aktualisierung des Feeds String flugzeugeUpdate "Letztes Feed update [%s]" // Zeitpunkt der letzen aktualisierung String flugzeugeZeitpunkt "Letzte aktualisierung [%s]" // Schalter zum aktualisieren der Anzahl der Flugzeuge Switch flugzeugeAktualisieren "aktualisieren" |
Eine neue Datei im Transform Verzeichnis mit Namen getAnzahlFlugzeuge.js mit diesem Inhalt
|
1 |
JSON.parse(input).field1; |
Und noch eine Flug.rules im Rules Verzeichnis, die bei klick auf den Schalter aktiv wird:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 |
import org.openhab.core.library.types.* import org.openhab.model.script.actions.* import java.util.Date import java.text.SimpleDateFormat // // Fluginfos für OpenHAB // // (c) 2016 Thomas Wenzlaff http://www.wenzlaff.info // //------------------------------------------------------------------------ // Aktualisiert die Fluginfos, d.h die Anzahl der Flugzeuge aus ThingSpeak //------------------------------------------------------------------------ rule "Aktualisiert die Fluginfos von ThingSpeak" when Item flugzeugeAktualisieren received command ON then logInfo("Flug","aktualisiere Fluginfos ...") var String result = sendHttpGetRequest("https://api.thingspeak.com/channels/44177/feeds/last.json") // {"created_at":"2016-05-16T16:10:02Z","entry_id":80076,"field1":"11"}' by the function '$.field1' logInfo("Flug", "nur das Ergebnis der Abfrage: " + result) var String anzahl = transform("JSONPATH", "$.field1", result) logInfo("Flug", "Anzahl der Flugzeuge, update auf: " + anzahl) var String createdAt = transform("JSONPATH", "$.created_at", result) logInfo("Flug", "Letztes update um: " + createdAt) // aktualisierungs Datum setzen flugzeugeUpdate.postUpdate(createdAt) // aktualisiere Anzahl der Flugzeuge flugzeugeAnzahl.postUpdate(anzahl) // Schalter wieder zurücksetzen flugzeugeAktualisieren.postUpdate("OFF") var SimpleDateFormat df = new SimpleDateFormat( "HH:mm:ss dd.MM.YYYY" ) var String timestamp = df.format( new Date() ) flugzeugeZeitpunkt.postUpdate(timestamp); end |
Und noch das von mir erstellte Icon des Flugzeuges:
![]()
Dies super Icon kann kostenlos von hier geladen und frei verwendet werden. Wer kann ein besseres zur freien Verwendung zeichnen?
Auf der Ankunftsseite von HAJ wird die AF-1 wohl nicht erscheinen. Auch die Transponder werden wohl ausgeschaltet sein.
 Im Moment ist eh nicht viele in EDDV los. Bei 4 Grad ist es auch zu kalt zum Flughafen zu fahren. Hier gibt es Fotos der AFO.
Im Moment ist eh nicht viele in EDDV los. Bei 4 Grad ist es auch zu kalt zum Flughafen zu fahren. Hier gibt es Fotos der AFO.
Hier kommt gerade ein Franzose:

Der Luftraum in Langenhagen wird jetzt schon mal überwacht:
Jetzt Hagelt es in EDDV, ob er da landet?

Drei Hubschrauber sind im Moment im Einsatz.
Der Wagen von ihn, nähe konnte ich nicht ran:

Beim Abflug musten drei Flieger eine Warteschleife fliegen, hier eine:

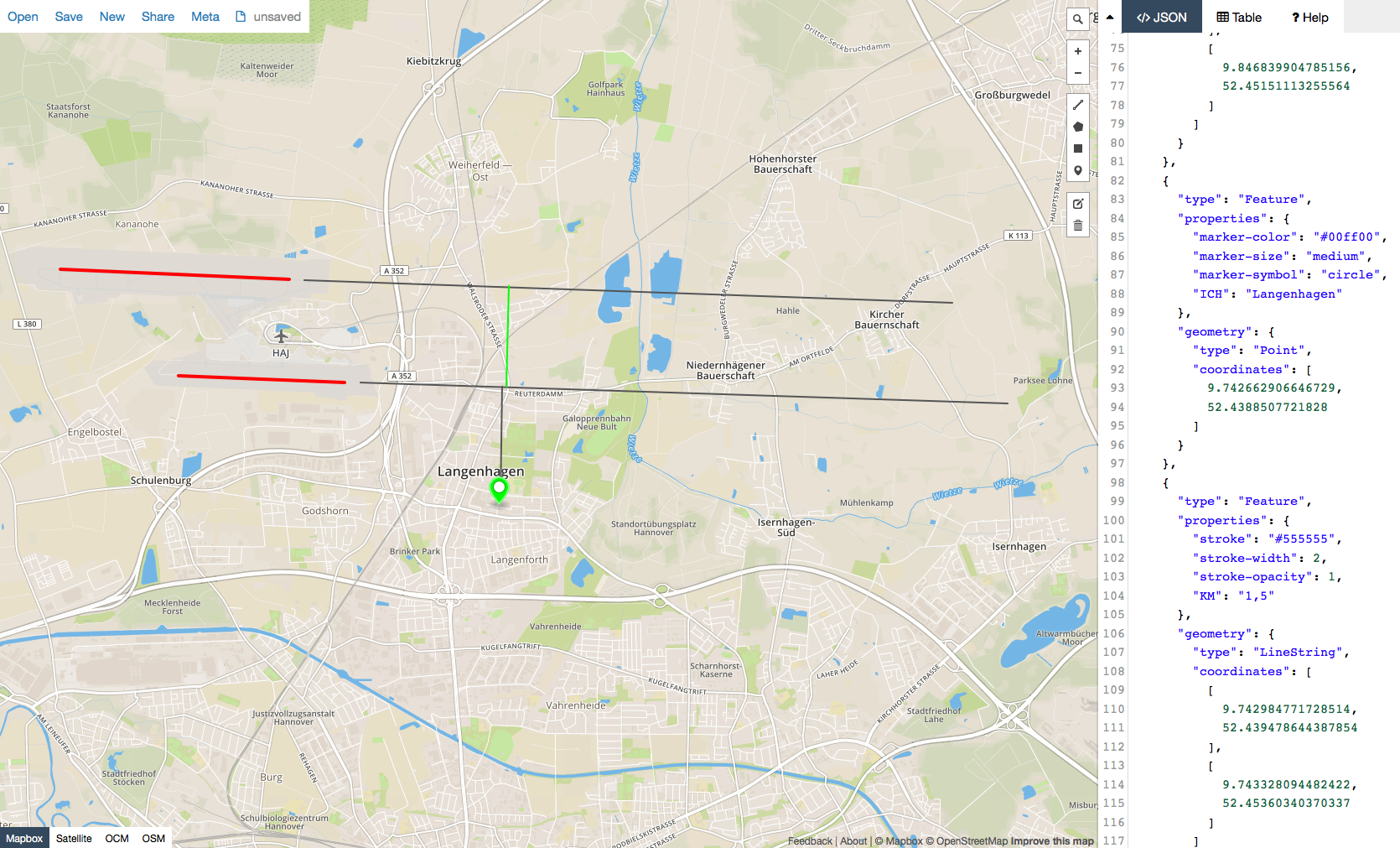
Mit geojson.io können leicht GEO-Daten im verschiedenen Formaten erzeugt werden z.B. im JSON, CSV, KLM, WKT Format.

Habe mal, weil der 44. Präsident, Obama in Hannover Langenhagen landet, mal den Flughafen mit zwei von drei Landebahnen markiert. Auch eine 9 km Verlängerung und eine Vermessung zu meinen Wohnort habe ich eingezeichnet:
Hier mit dem rechten Fenster der JSON Generierung:
Und eine von vier Karten, die unten links ausgewählt werden können:
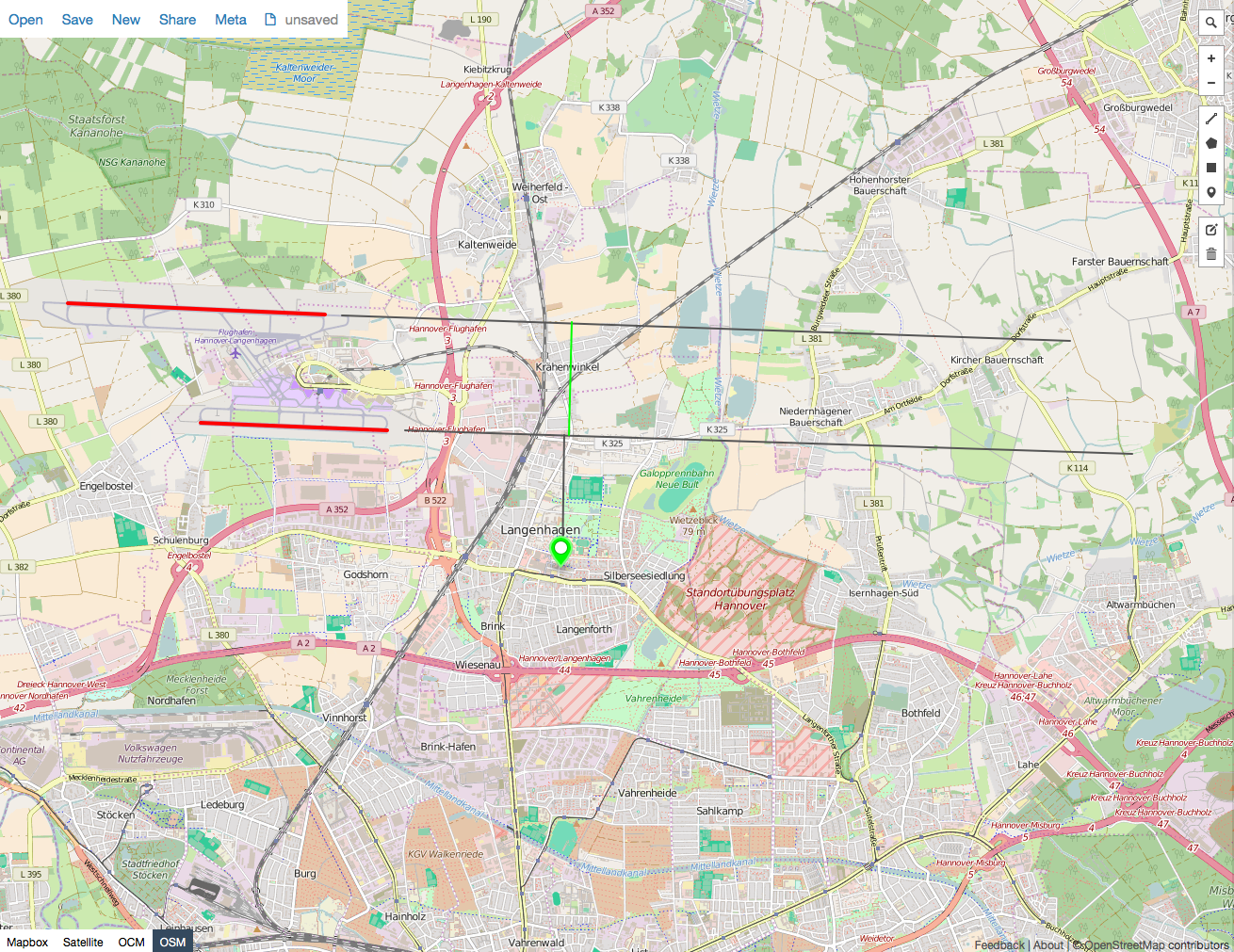
{kind=link}