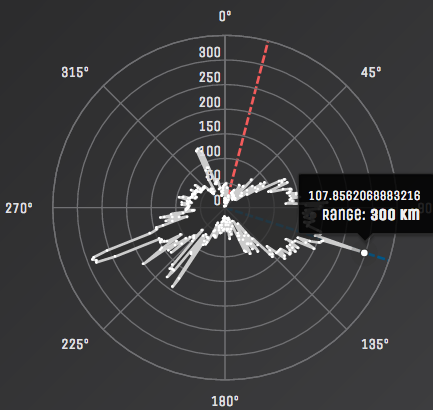
Wie war gestern der Empfang vom Raspberry Pi?

Ok, bis zu 300 km. Da müsste auch der Air India Flight #AI171 mit bei sein!
mit Java, Raspberry Pi, SDR, Linux, Arduino, Sicherheit, Blender, KI, Statistik, Krypto und Blockchain
Wie war gestern der Empfang vom Raspberry Pi?
Ok, bis zu 300 km. Da müsste auch der Air India Flight #AI171 mit bei sein!
Was ist denn heute schönes aus Holland angekommen?
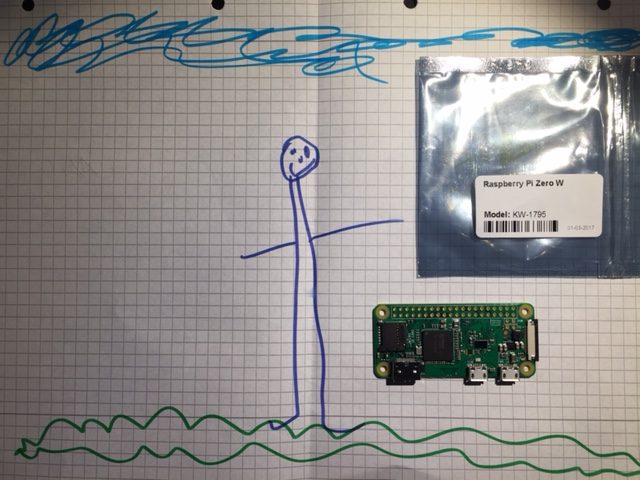
Übrigens, das auf dem Bild soll ich sein, aus der Sicht einer netten 5 jährigen! Ich bin begeistert!
Vorderansicht: „Frisch aus Nederland eingetroffen: Raspberry Pi Zero W“ weiterlesen
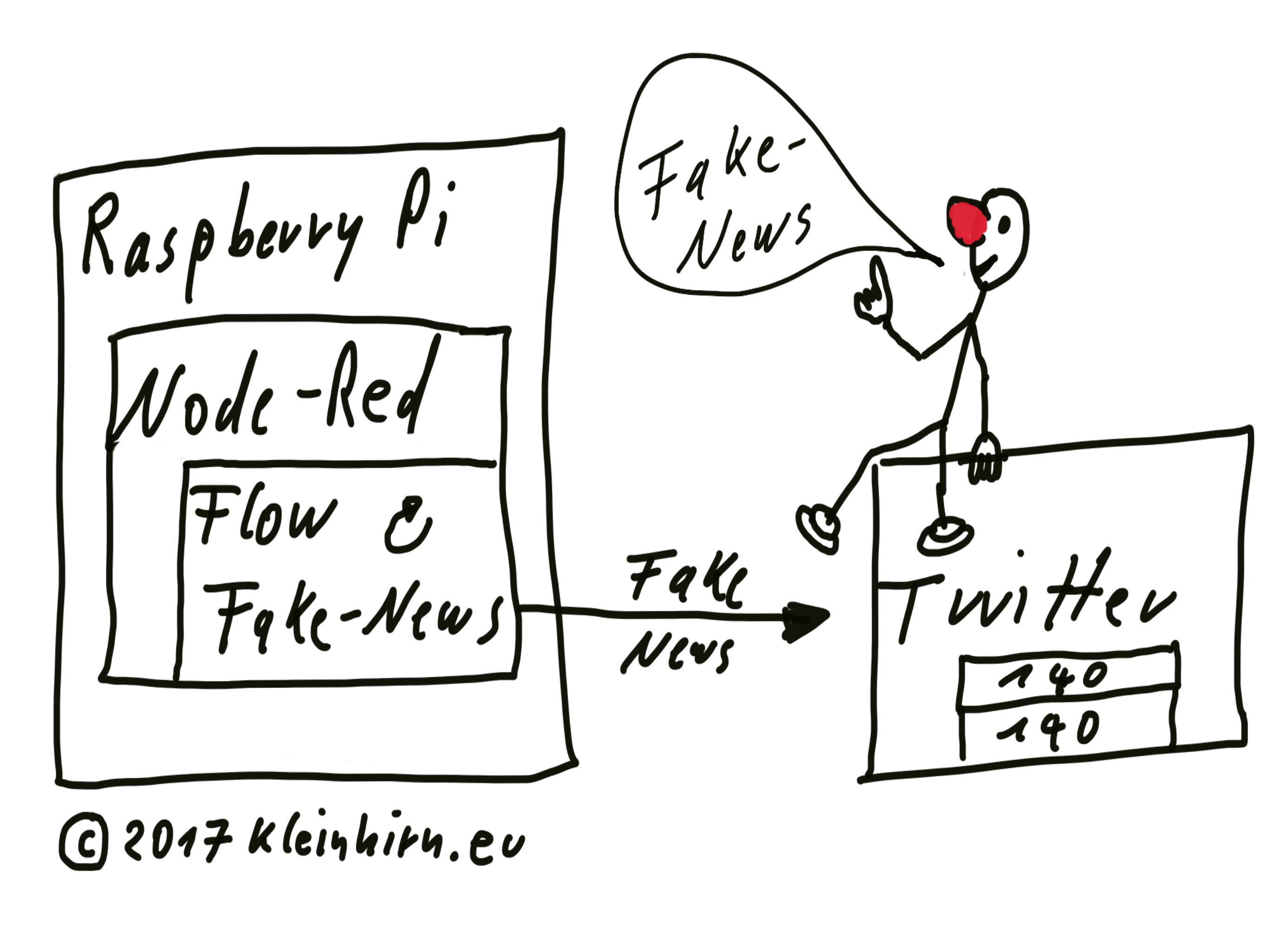
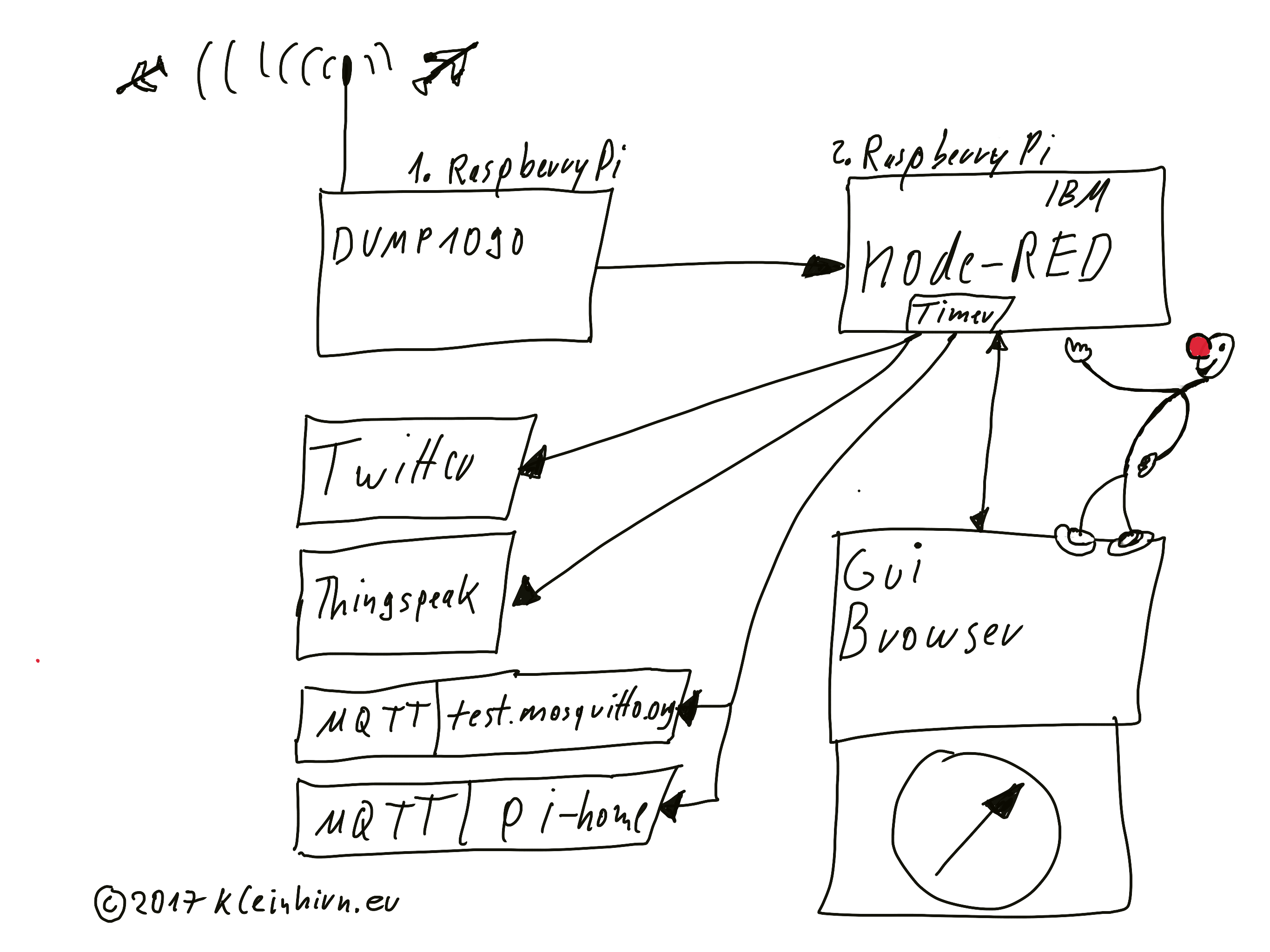
Es gibt viele Warnugen vor Fake-News! Sogar von der UN und auch von Heise. Das ist doch mal ein Grund, eine Fake-News-Generator mit Node-RED auf dem Raspberry Pi zu implementieren.
Zuerst ein Architektur Bild:
Dann hier das Ergebniss vom Fake-News-Generator, der jede Stunde (leicht anpassbar) auf Twitter Fake Meldungen postet:

Wie wird das mit Node-Red implementiert? Wir brauchen eine Flow in der Form:
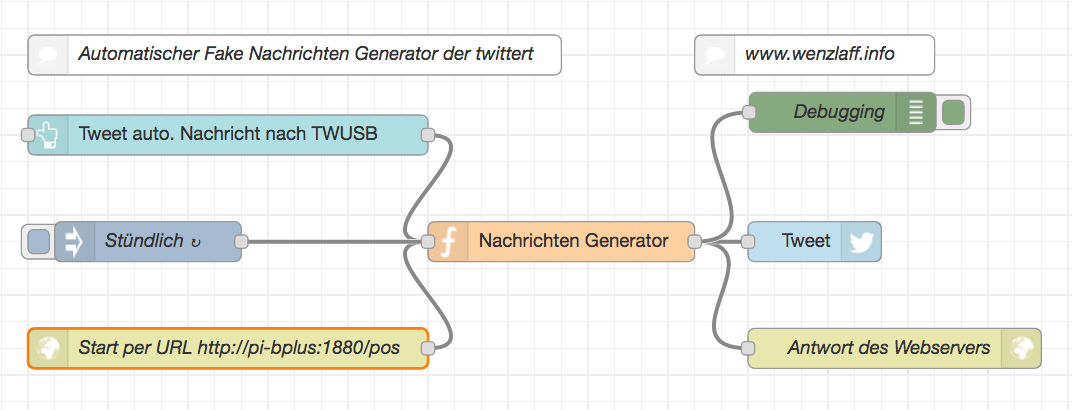 „Fake-News-Generator mit Node-RED und Raspberry Pi“ weiterlesen
„Fake-News-Generator mit Node-RED und Raspberry Pi“ weiterlesen
Habe vor ein paar Tagen aus China einen programmierbaren USB-Lüfter mit einem Programm für Windows auf einer mini CD und USB-Kabel erhalten. Musste ihn aber mal wieder beim Zoll direkt abholen, da das Teil für 0 Euro deklariert wurde. Da wollte der Zoll dann doch einmal reinschauen und die Rechnung sehen.
Denn Lüfter wollte ich mal an einem Raspberry Pi anklemmen, es geht aber auch jeder andere USB-Port wie Laptops, Netzteile oder Accus.
Hier meine erstes Demo-Video (2 Min) um zu zeigen was für Effekte man so programmieren kann. Im halbdunkeln, damit man es besser erkennen kann:
Hier ein paar „Programmierbarer USB Lüfter nicht nur für den Raspberry Pi“ weiterlesen
Vor ein paar Tagen hatte ich schon mal den ATTINY 85 vorgestellt.

Das ist ein cooles Teil mit USB und das für 1 Euro. Er emuliert eine Tastatur (HID).
Also mal ein weiteres Programm, für folgendes Problem. Wer lange und komplizierte Passwörter verwendet, hat mit unter keine Lust, sie immer wieder einzugeben. Das ist auch fehleranfällig. Oder man möchte jemand anderes an seinen Rechner lassen, und ihn nicht das Passwort geben. Also gibt man den Generator weiter.
Wir erstellen also ein Programm, das das Passwort automatisch an den Rechner sendet. Man muss dann natürlich auf das Teil aufpassen, das es nicht in falsche Hände kommt. Wir senden nur einmal, das gespeicherte Passwort. Hier mal ein 45 Sekunden Demo Video:
Hier das C-Programm, es ist ein sehr einfaches Programm mit ein paar Zeilen: „Video DIY USB Passwort Generator mit Attiny 85“ weiterlesen
Da ich hier beschrieben habe wie die Flugdaten mit einem Raspberry Pi an einen MQTT Server gesendet werden, habe ich mal gleich die neu Version vom MQTT.fx 1.3.1 Client geladen und getestet. Er hat jetzt auch ein dark Thema:

Ihr könnt es auch leicht testen. Verwendet den test.mosquitto.org und subscribe /Anzahl/Flugzeuge/Hannover dann habt ihr meine Flugdaten vom Raspberry Pi. Cool oder?
Vor einiger Zeit, hatte ich schon mal beschrieben, wie mit jq Flugdaten mit einen Raspberry Pi an Thingspeak.com gesendet werden können. Nun wollte ich das mal ablösen und mit Node-RED durchführen. Gesagt getan, erst mal die Architektur:
Nun noch den Flow modellieren:
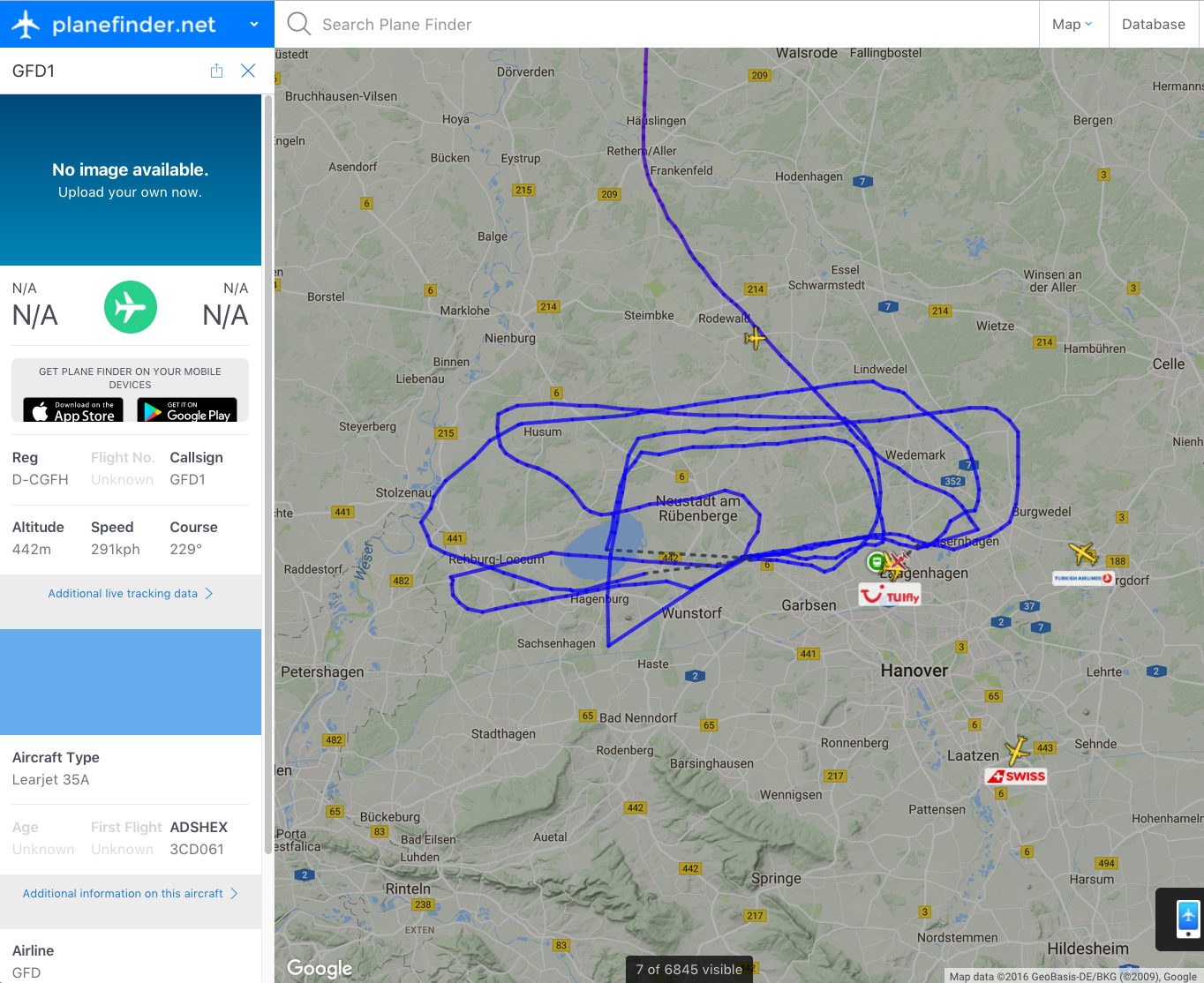
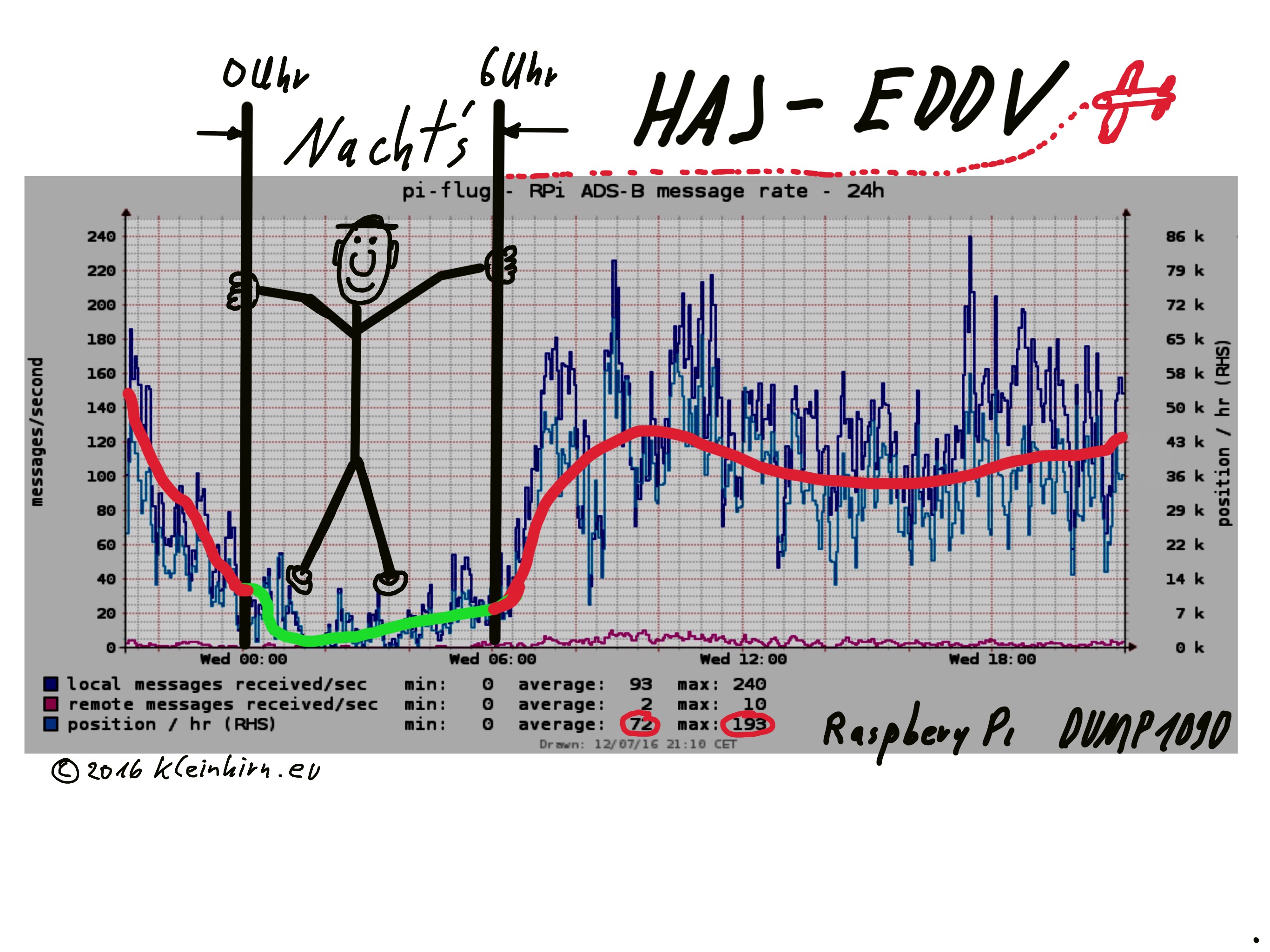
Wie können die Flugdaten an das OpenSkyNetwork gesendet werden? Mit der neuen Software brauch man auch keine Ports usw. im Router freigeben. Einfach den Feed installieren. So wie das auch für die anderen Dienste geht. Hier mal das Ergebnis von eben:
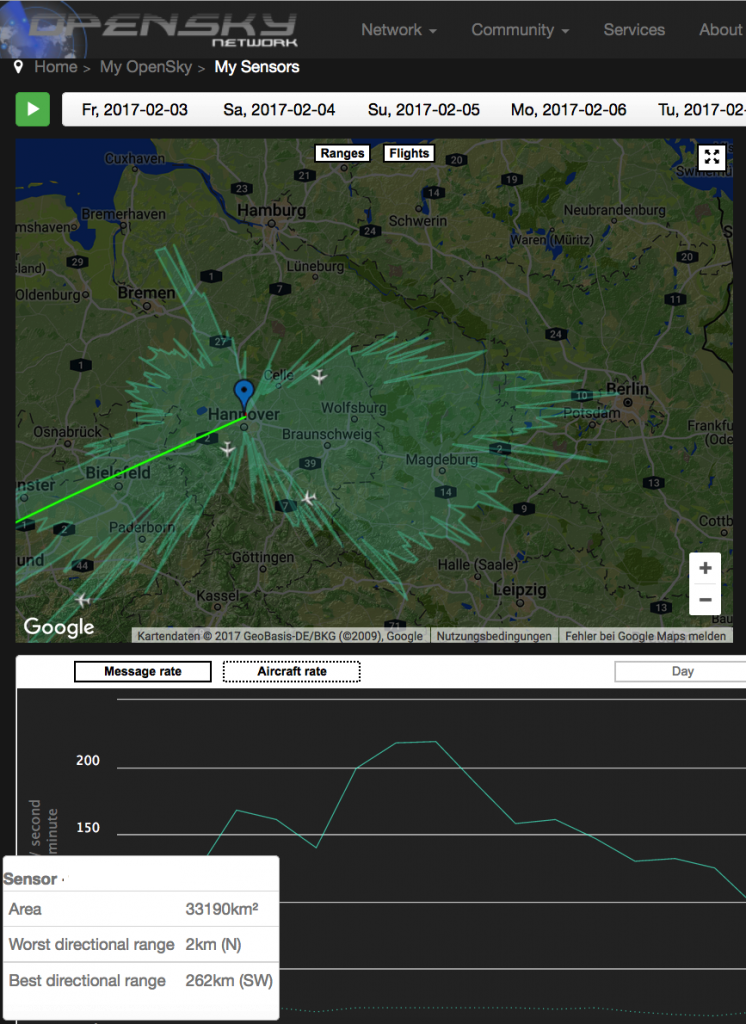
Es ist unten links, gut zu erkennen das der weiteste Empfang 262 km ist. Cool.
Zuerste einen kostenlosen Account bei OpenSkyNetwork anmelden.
Dann wie hier beschrieben die Software auf dem Raspberry Pi installieren. Das geht aber einfacher so …
|
1 2 3 4 |
# wir holen uns die aktuelle Feeder Software wget https://opensky-network.org/files/firmware/opensky-feeder_latest_armhf.deb # und installieren die sudo dpkg -i opensky-feeder_latest_armhf.deb |
Es kommen dann noch die folgenden Setup Dialoge, die natürlich mit den eigenen Werten angepasst werden müssen:
Zuerst den Breitengrad, (Latitude) wo man wohnt:
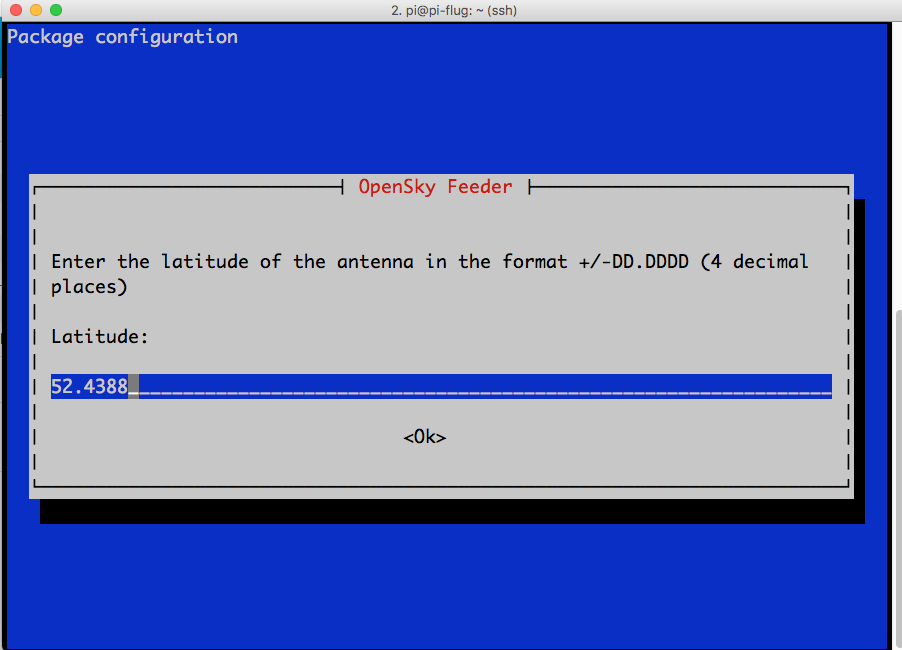
Dann die Longitude (Längengrad): „Raspberry Pi: Flugdaten mit DUMP1090 an OpenSkyNetwork senden“ weiterlesen
Wie kann eine Pushover Nachricht mit dem aktuellen Wetter von OpenWeathermap jeden Tag mit Node-Red an das Handy versandt werden? Für OpenHab hatte ich sowas ähnliches ja schon mal hier beschrieben.
So sieht die Pushover Nachricht aus, die ich jeden morgen um 6:30 Uhr auf mein Handy bekomme. So weiß ich gleich, wie der Tag wird:
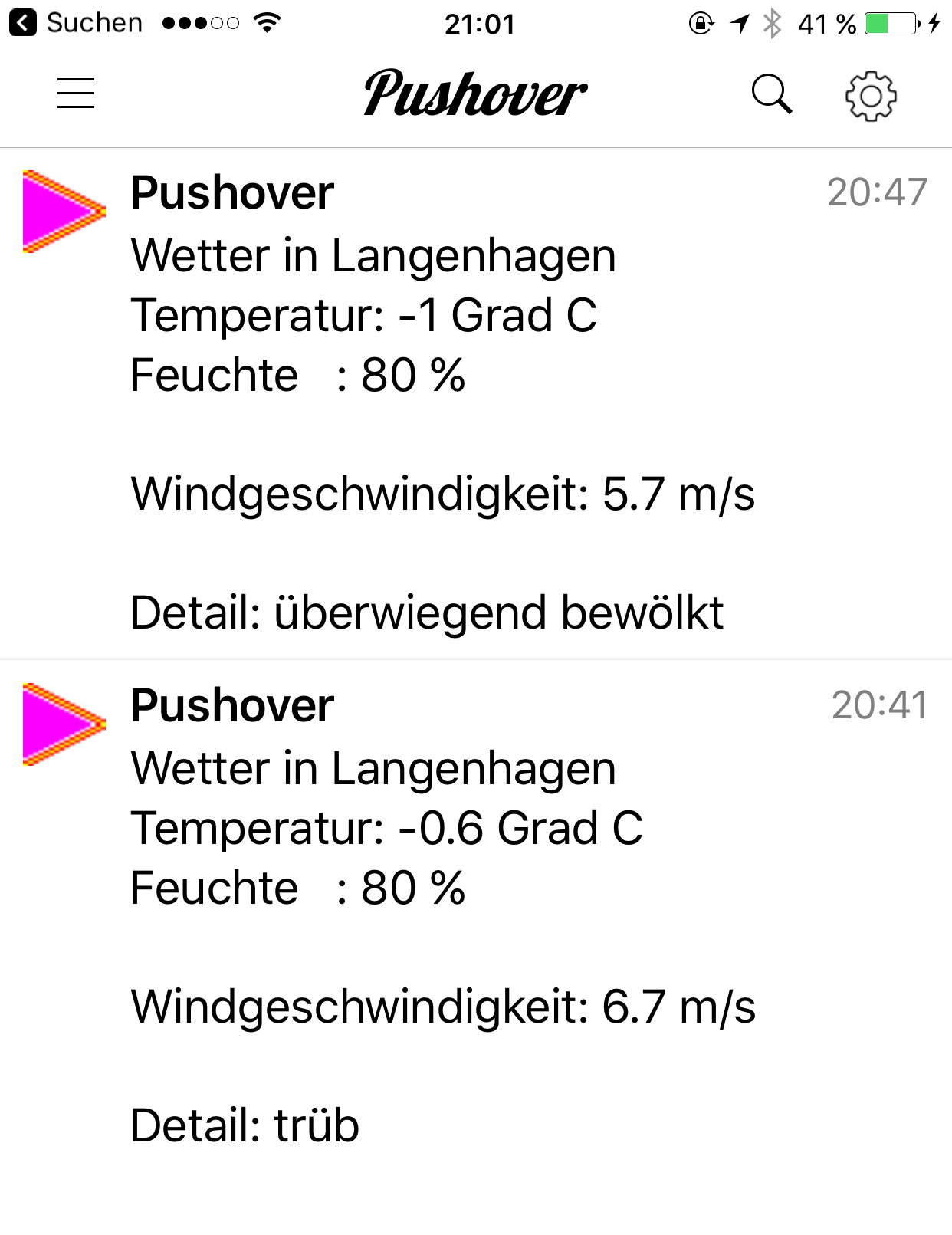
So sieht mein Testflow aus. Er fragt Timergesteuert und auch manuell über die GUI das Wetter ab, und versendet eine formartierte Nachricht per Pushover. „Wie kann eine Pushover Nachricht mit dem aktuellen Wetter von OpenWeather jeden Tag mit Node-Red und Raspberry Pi an das Handy und Tablet versandt werden?“ weiterlesen
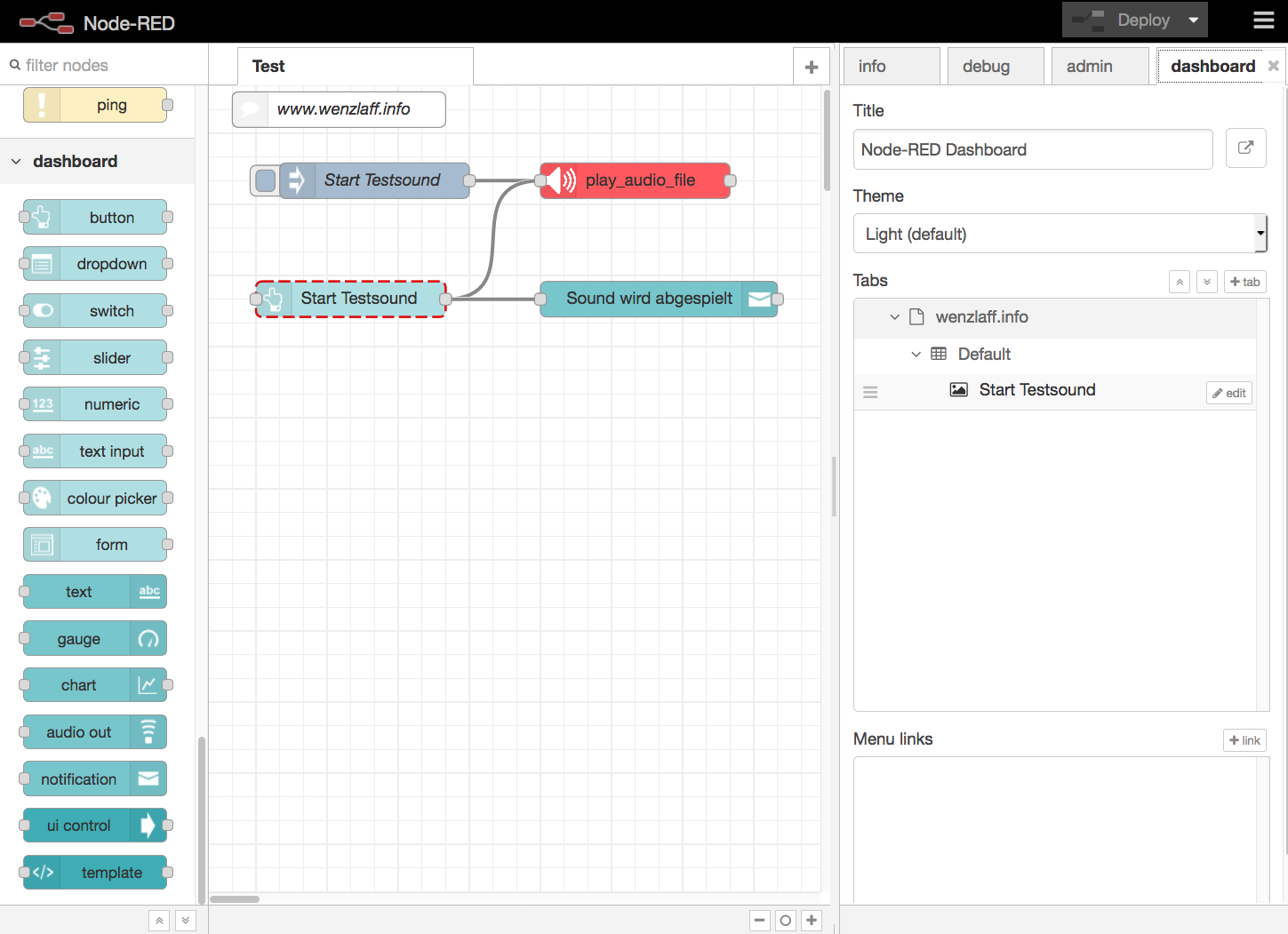
Auf meinem Raspberry Pi läuft Node-Red. Nun wird seit einiger Zeit die Node-RED-Contrib-UI Gui nicht weiter entwickelt. Also mal die passende Gelegenheit es zu löschen und den Nachfolger das Node-RED-Dashboard zu installieren. Der Node hat eine schöne GUI, wie diese Bilder zeigen. Er läuf ab Node-RED version 0.14.
Vor dem update nicht vergessen, die alten Flows zu sichern.
|
1 2 3 4 5 6 |
# den alten Node löschen cd ~/.node-red sudo npm uninstall node-red-contrib-ui # den neuen installieren sudo npm install node-red-dashboard sudo reboot |
Nun können die neuen GUI-Elemente verwendet werden, hier links die verfügbaren Elemente.
 „Upgrade von Node-RED-Contrib-UI nach Node-RED-Dashboard“ weiterlesen
„Upgrade von Node-RED-Contrib-UI nach Node-RED-Dashboard“ weiterlesen
Nun ein kleines Testprogramm für den Quicktest ob der ATTINY85 auch läuft. Dazu das Testprogramm in den Arduino eingeben:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 |
// // Testprogramm für den ATTINY85 // // Die LED auf dem Board blinkt im Sekunden Takt // // Einstellungen Board: Digispark default (16,5 Mhz) // // Programmer: USBtinyISP // // Programmgröße: 2926 Byte (48%) von 6012 Byte // // Globale Variablen verwenden dyn. Speicher: 88 Byte // // // Thomas Wenzlaff http://www.wenzlaff.info Version 1.0 // #include <DigiKeyboard.h> // Setup läuft einmal nach dem Reset void setup() { pinMode(1, OUTPUT); //die LED auf dem Board, als Ausgang } // die Hauptschleife für immer ... void loop() { digitalWrite(1, HIGH); // schaltet die LED an (HIGH Level) delay(200); // warte 200 ms digitalWrite(1, LOW); // schaltet die LED aus delay(1000); // warte 1 Sekunde } |
Das C-Programm compilieren:

Und in den ATTINY85 hochladen, „C-Testprogramm für den ATTINY85 (Digispark) mit der Arduino IDE hochladen und Ergebnis Video“ weiterlesen
Wie können die Menü Einträge, für die Digispark AVR Boards in der Arduino IDE ergänzt werden? Evl. fehlen diese Einträge im Menü: „Werkzeuge – Board“
Dann in dem Menü: „Arduino – Einstellungen“ auf den Button „Zusätliche Boardverwalter-URLs“ klicken und die folgende URL ergänzen:
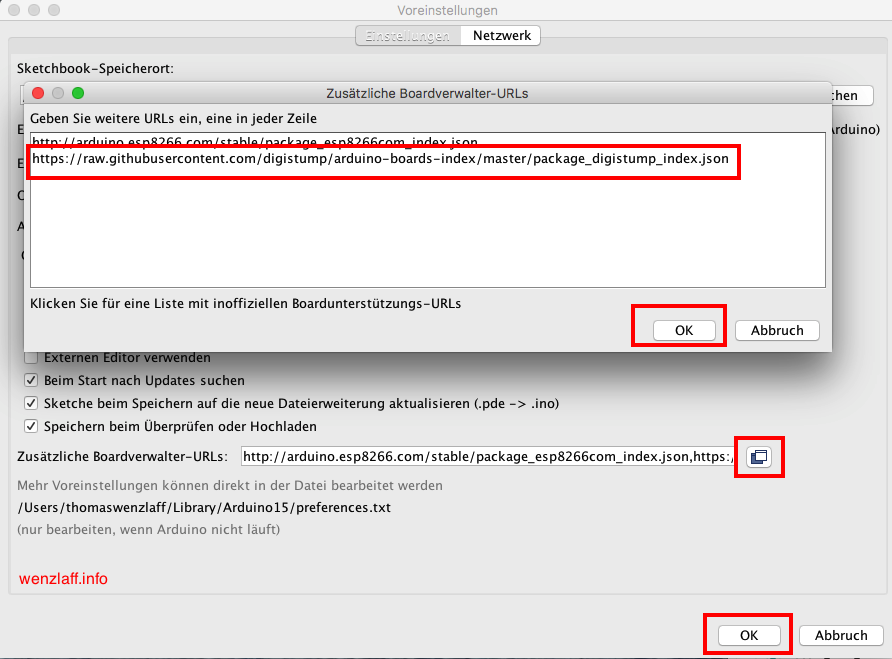
URL:
|
1 |
https://raw.githubusercontent.com/digistump/arduino-boards-index/master/package_digistump_index.json |
Nun noch unter dem Menüeintrag: „Werkzeuge – Board – Board Verwalter …“ den Digistump AVR Boards auswählen und installieren:
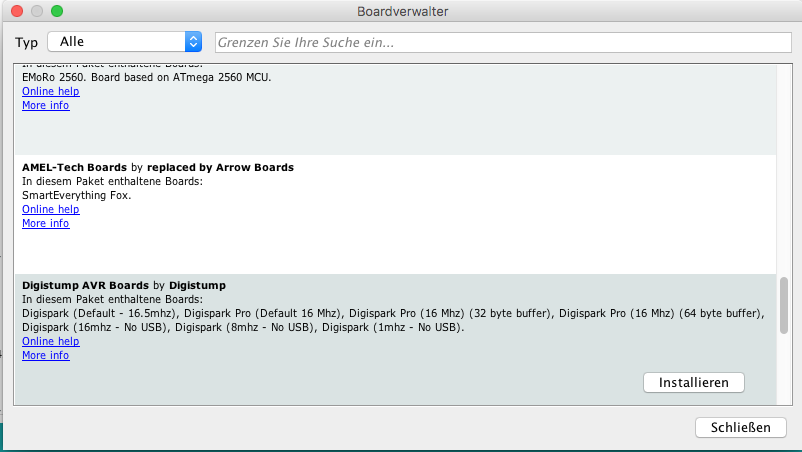
Schon sind die Menüeinträge vorhanden. Dann kann der ATTINY85 ja geflasht werden.
Für 1,28 Euro inkl. versand aus China eingetroffen …

… und von hinten:
Hier ein paar tech. Daten vom Anbieter.
|
1 2 3 4 5 6 7 8 9 10 11 |
Support for the Arduino IDE 1.0+ (OSX/Win/Linux) Power via USB or External Source - 5v or 7-35v (automatic selection) On-board 500 mA 5V Regulator Built-in USB (and serial debugging) 6 I/O Pins (2 are used for USB only if your program actively communicates over USB, otherwise you can use all 6 even if you are programming via USB) 8k Flash Memory (about 6k after bootloader) I2C and SPI (vis USI) PWM on 3 pins (more possible with Software PWM) ADC on 4 pins Power LED and Test/Status LED (on Pin0) Size: 1.8 cm x 2.6 cm |
Dann mal an dem Raspberry Pi anschließen, aber nicht mehr heute. Oder andere Ideen?
Habe eine USB-Ladegerät, das von der Größe her auch als Gehäuse für den Raspberry Pi dienen könnte. Dann hätte man das Netzteil und den Pi zusammen. Also mal wieder ein Bastelprojekt. So sieht das Teil aus:

Und von unten mit CE Zeichen aus China:

Achtung! Netzspannung! Lebensgefahr! Nur von „Passt der Raspberry Pi in das USB-Netzteil-Gehäuse (JCMASTER)?“ weiterlesen
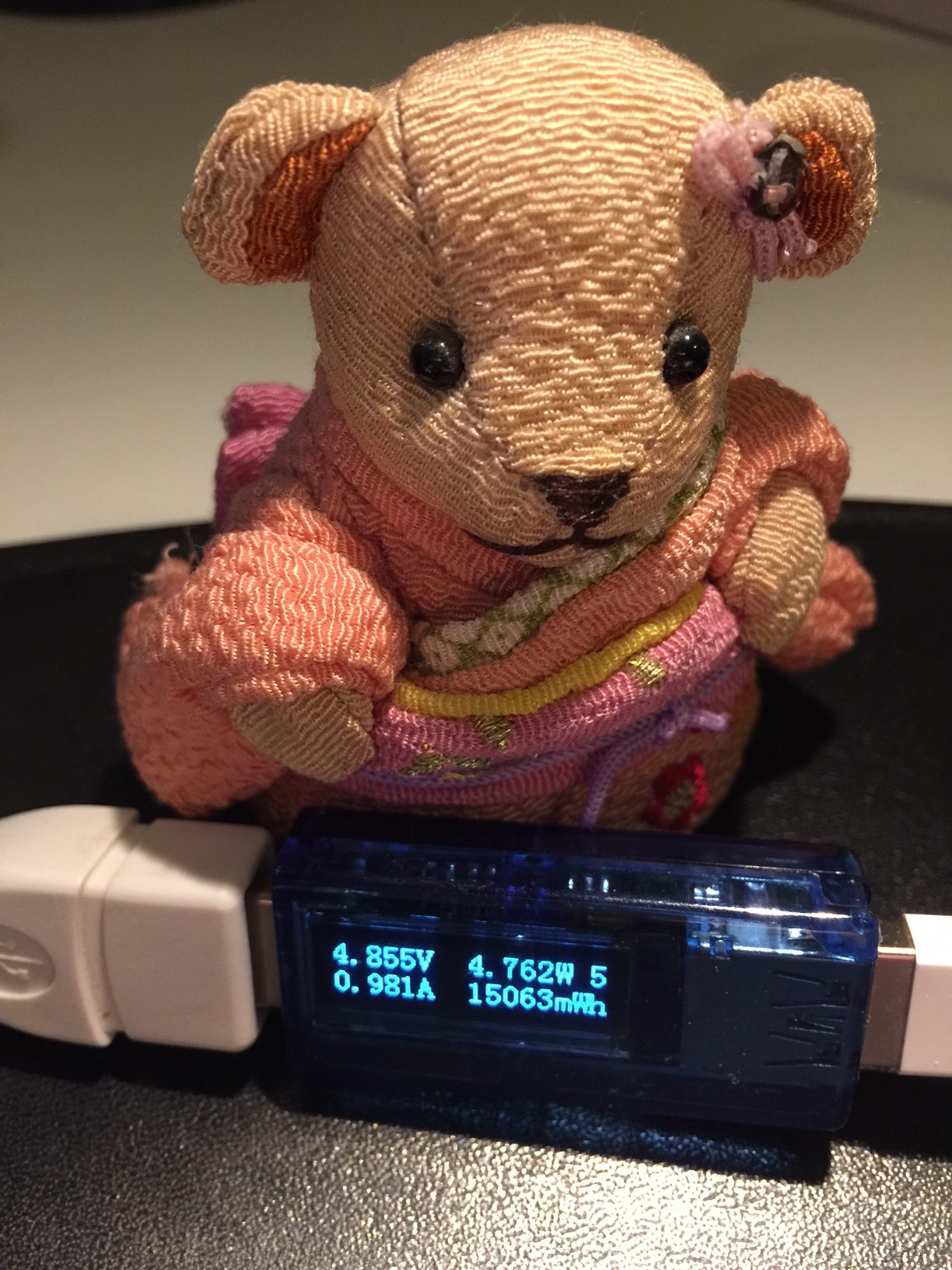
Mal wieder was aus China eingetroffen. Ein USB Spannungs und Strommesser für ein paar Euro. Es werden wechselweise der Strom und die Spannung angezeigt. Ok, 5 Volt ist schon mal ein guter Wert:

Und 0 Ampere ist auch ok, wenn nichts dran ist: „USB Spannungs und Strommesser am Raspberry Pi“ weiterlesen
Den Raspberry Pi muss man nicht jeden Tag neu booten. Einer von meinen läuft z.B. 215 Tage:
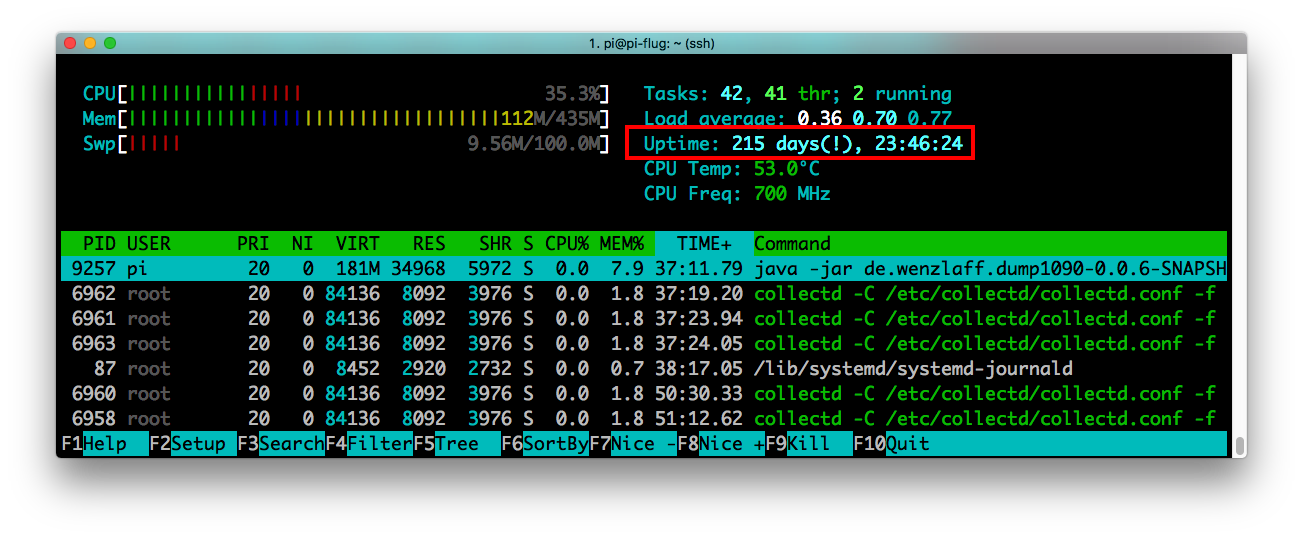
Wie kann das angezeigt werden?
Einfach auf der Konsole top oder htop eingeben. Wie lange läuft Euer Pi? Gern als Kommentar oder einfach heier ein like abgeben:
Manchmal will man sehen, was alles so in einer compilierten Java Datei steckt. Nicht immer hat man den Quelltext. Auch für die Fehlersuche ist ein Disassembler mal ganz gut.
In jedem JDK ist auch ein Disassembler javap dabei. Denn wollen wir nun einmal auf eine unbekannte Java Class Datei loslassen, um zu sehen, was es so zu sehen gibt.
Zuerst loggen wir uns auf die Kommandozeile eines Raspberry Pi ein, auf dem ein Java JDK installiert ist. Ob Java installiert ist kann mit
|
1 |
java -version |
getestet werden. Wenn dort eine Versionsangabe geliefert wird, ist alles ok.
Dann legen wir erst mal ein Testverzeichnis an und wechsel in das Verzeichnis:
|
1 2 |
mkdir java-test cd java-test |
Dann holen wir uns in das Verzeichnis eine unbekannte Flugzeug.class Datei (der Quellcode ist hier zu finden):
|
1 |
wget http://blog.wenzlaff.de/wp-content/uploads/2017/01/Flugzeug.class |
Diese Datei wollen wir nun disassemblieren, mit
|
1 |
javap Flugzeug.class |
Schon bekommen wir alle gewünschten Informationen:
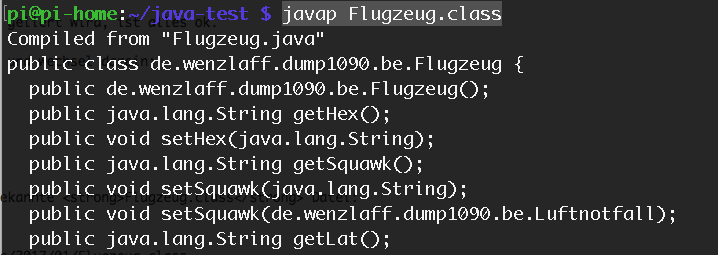
Nun schauen wir uns mal alle Möglichkeiten an: „Mit dem Raspberry Pi den Java Class File Disassembler (javap) aufrufen“ weiterlesen
Vorgestern ist mein neues Gadget, das man für 7,40 Euro inkl. Versand aus China bekommen kann eingetroffen. Hier mal die Daten von der Ladung eines iPadMini:
Das ist ja schon interessant, wie unterschiedlich meine USB Ladegerät den Strom liefern. Kein wunder das mache doppelt solange laden. Ich bin nun gespannt, wie es mit dem Raspberry Pi aussieht. Nur heute will ich keinen vom Netz trenne, es ist ja kein Cubi, der jeden Tag gebootet werden muss 😉

Manchmal muss man Eclipse mit dem Parameter -clean starten. Wie kann das unter Mac OS X geschehen?
Zuerst auf der Konsole mit cd in das Programm Verzeichnis von Eclipse wechseln.
|
1 |
cd /Applications/Eclipse-Neon.app/Contents/MacOS |
und dann den Aufruf:
|
1 |
eclipse -clean |
ausführen.
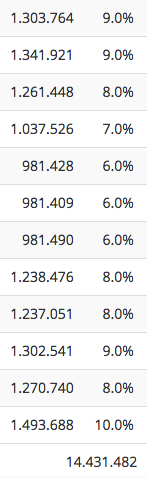
Der Beste Monat war der Januar, mit ca. 1,5 Millionen. Mal sehen was 2017 in bezug auf Raspberry Pi usw. bringt.
Hier nun die Grafik von 2016, man sieht auch gut das Sommerloch:
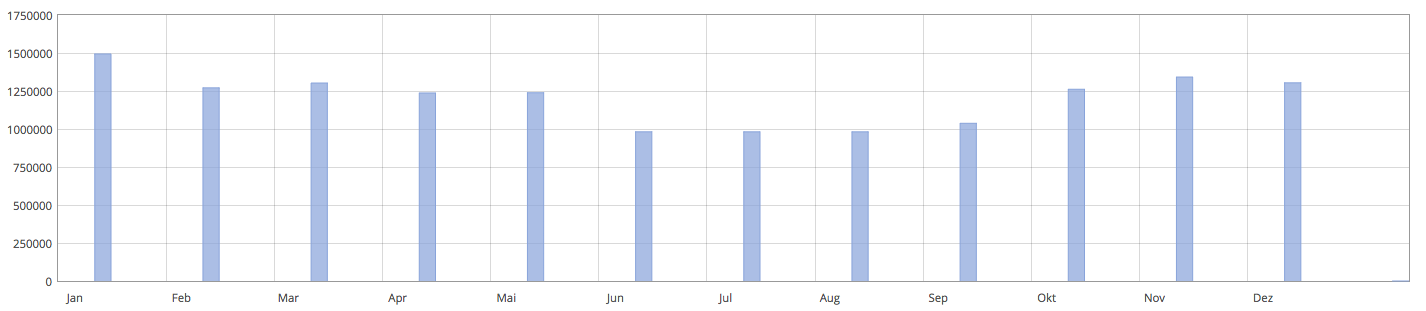
2016 (von Dez bis Jan):
Habt Ihr Themenwünsche oder Vorschläge für 2017? Dann gerne als Kommentar oder ein like!
Bei der Benachrichtigung stören solche Ausbildungsflüge:
Bei denen will ich nicht per Pushover benachrichtigt werden. „Raspberry Pi: Flugzeuge Erfassung jetzt mit Blacklist in Version (0.0.7) auf Maven Central veröffentlicht“ weiterlesen
Für meinen Raspberry Pi brauche ich nun eine Sprachausgabe da Karotz gestorben ist. Ich habe noch einen < 5 Euro Bluetooth Speaker aus der China-Bucht liegen. So ein Teil:

Denn wollte ich nun drahtlos anbinden.
Dazu verwende ich für den Raspberry Pi den folgenden Bluethooth USB-Adapter, denn ich schon mal mit Fhem angebunden hatte.

Das ist schnell gemacht! „MP3 und WAV Dateien mit einem Raspberry Pi über Bluetooth (Drahtlos) abspielen“ weiterlesen
Mein heutiges Raspberry Pi Projekt soll einfach eine Pushover Nachricht auf alle Handys und iPads versenden, wenn ein Kaffee gekocht wurde. So kann ich immer sehen, wieviele Kaffee ich so am Tag getrunken habe und wann.
Hier der Aufbau in der Küche.

Es wird ein Homematik „Pushover Nachricht mit dem Raspberry Pi versenden wenn ein Kaffee (قهوة) gekocht wurde via OpenHab“ weiterlesen
Zuerst die 4 Schrauben unten entfernen, dann sieht er schon mal nackt aus:
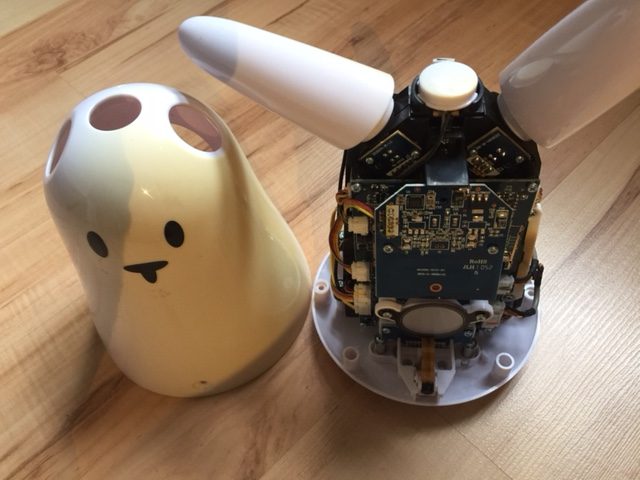
Eine Handvoll weitere Schrauben entfernen und man sieht schon mehr:

Links ist der RFID Reader, in der Mitte das Mainboard und rechts das WIFI: „Karotz en détails – Requiescat in pace“ weiterlesen
Dazu einfach das Tool Digital Color Meter starten:
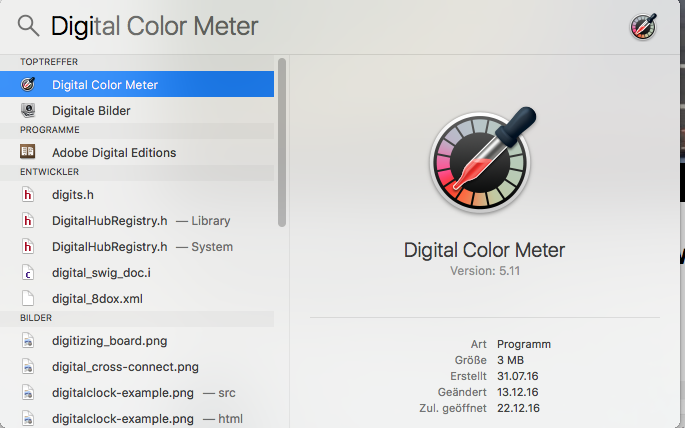
Nun wird der Farbwert angezeigt, wo die Maus hinzeigt: „Wie können Farbwerte auf einem Mac OS X 10.12.2 Sierra angezeigt werden?“ weiterlesen
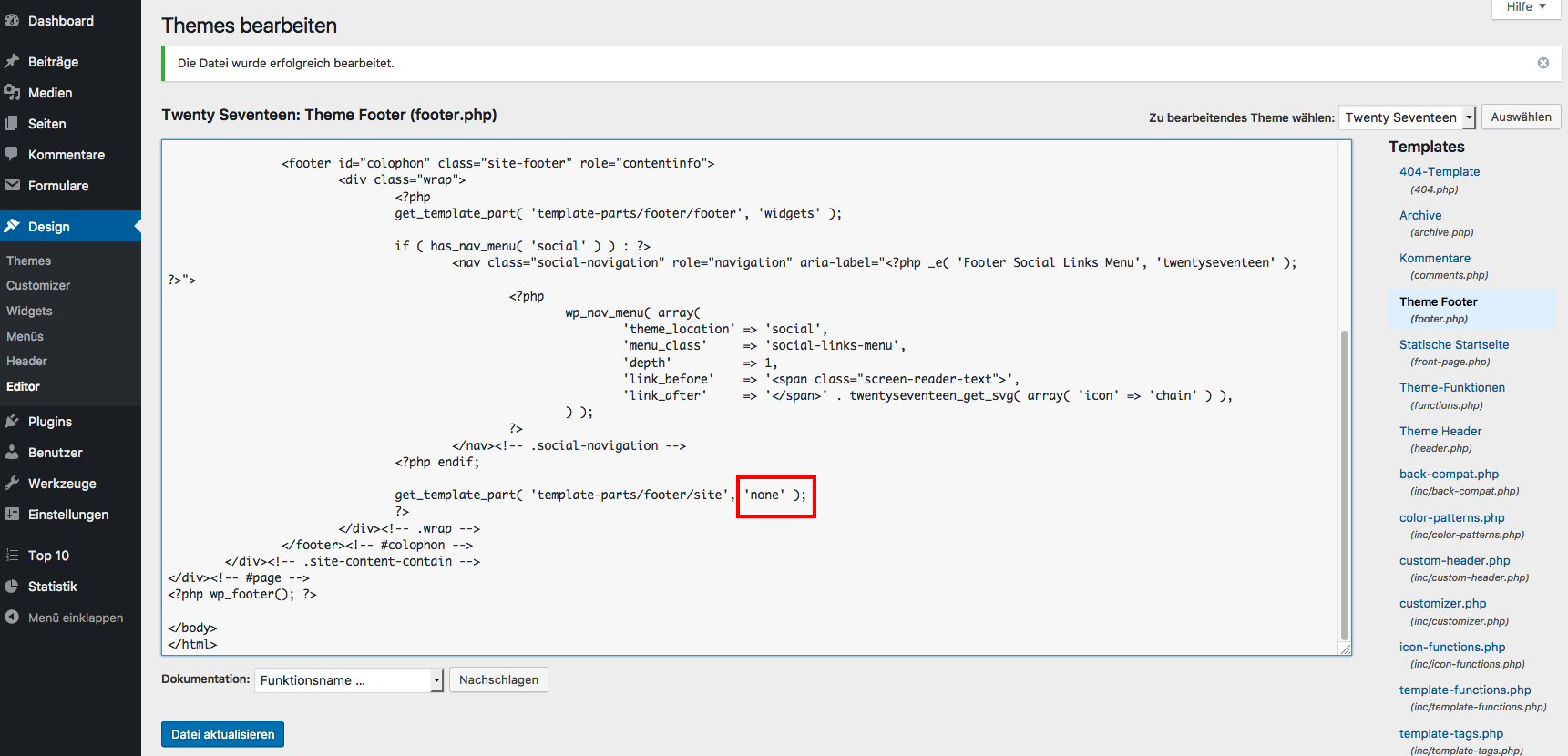
Einfach in der footer.php den Eintrag info durch none ersetzen.
Welche drei Beiträge dieses Blogs wurden am meisten gelesen? Auf Platz 1 ist ein Arduino Thema gelandet, aber die folgenden sind Raspberry Pi Themen.
Das gleiche Bild zeigen auch die Google Suchanfragen, da gewinnt auch der Arduino leicht.
Hier nun die TOP 3 von mir:
1. Temperatur Messung mit dem DS18B20 und Arduino Nano „Jahresrückblick 2016: Welche drei Seiten von diesem Blog wurden am meisten gelesen?“ weiterlesen
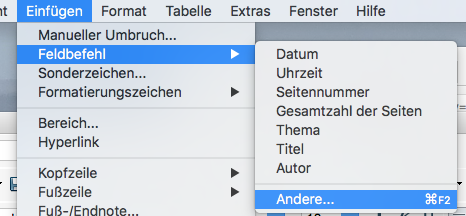
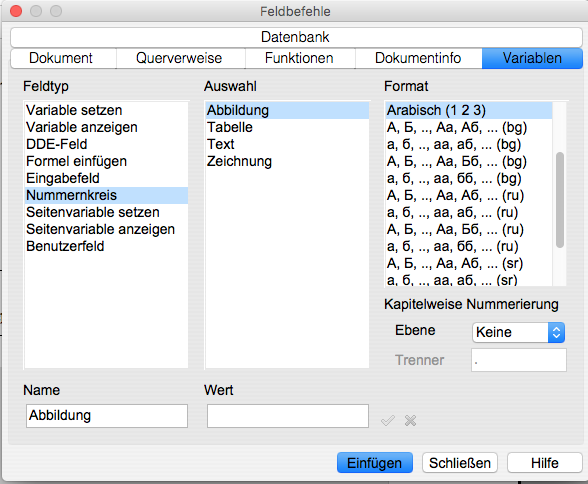
Das geht nicht mit der Funktion Einfügen – Feldbefehlt – Seitennummer wie eigentlich erwartet, sondern über die Funktion:
Einfügen – Feldbefehlt – Andere – Variablen – Nummernkreis
einfügen in die Kopfzeile:
Wenn der Seriendruck-Assistent gestartet wird, muss das generierte Dokument als ein Dokument gespeichert werden.
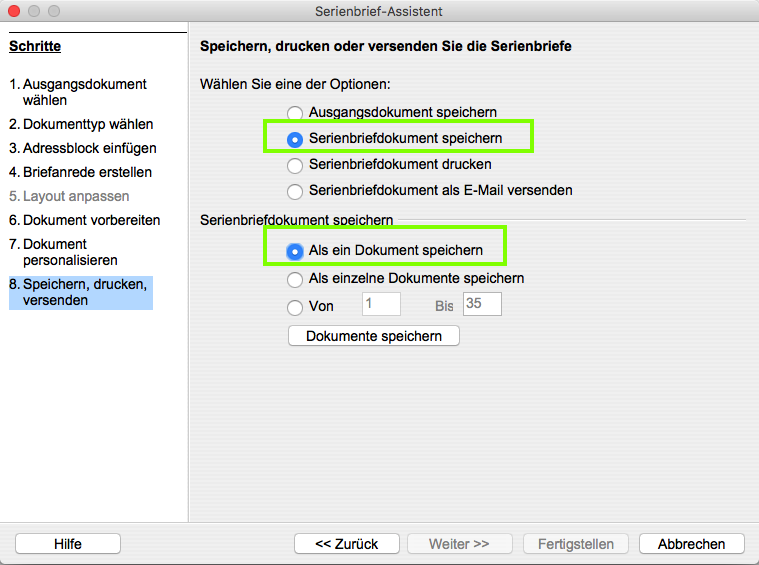
Nach der Info musst ich aber schon etwas suchen 😉 Aber es geht zumindestens 🙂
Cooler Step-Down Regle aus China eingetroffen. Was man so für 1,99 Euro inkl. Versand aus der Bucht bekommt! Hier mal das erste Foto:
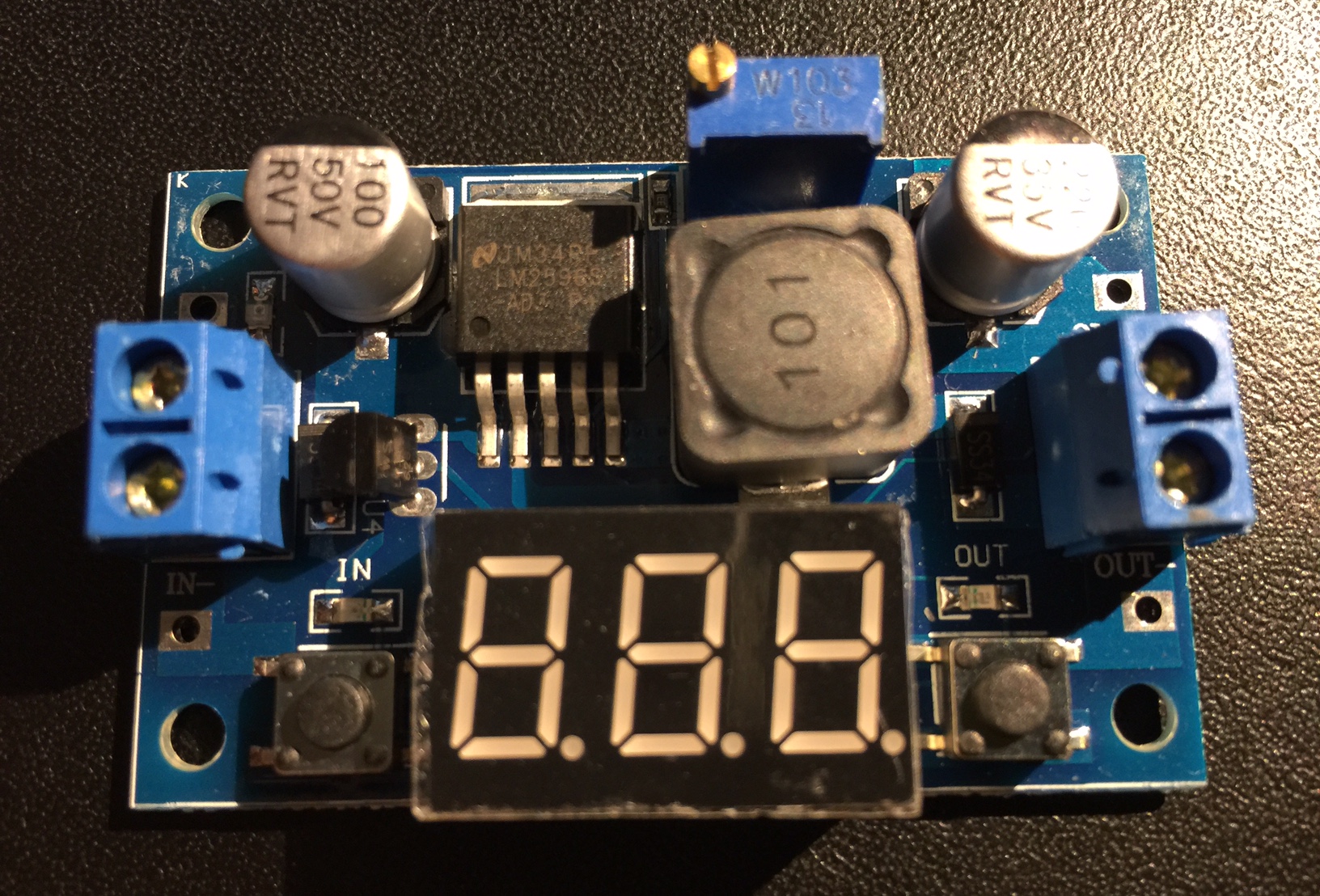
Hier die angegebenen Daten:
1. Input Voltage range:4~40 VDC
2. Output voltage range:1.25-37 VDC adjustable
3. Output current:2A
4. Voltmeter range: 0 to 40V, error ±0.1V
5. Input reverse polarity protection
6. Built in output short protection function
7. Built in thermal shutdown function
8. L x W x H = 6.1*3.4*12 cm
9. Weight: 22g
10. LEDdigital voltmeter tube, the accuracy is adjustable function, can be aimed at your multimeteradjustable accurate.
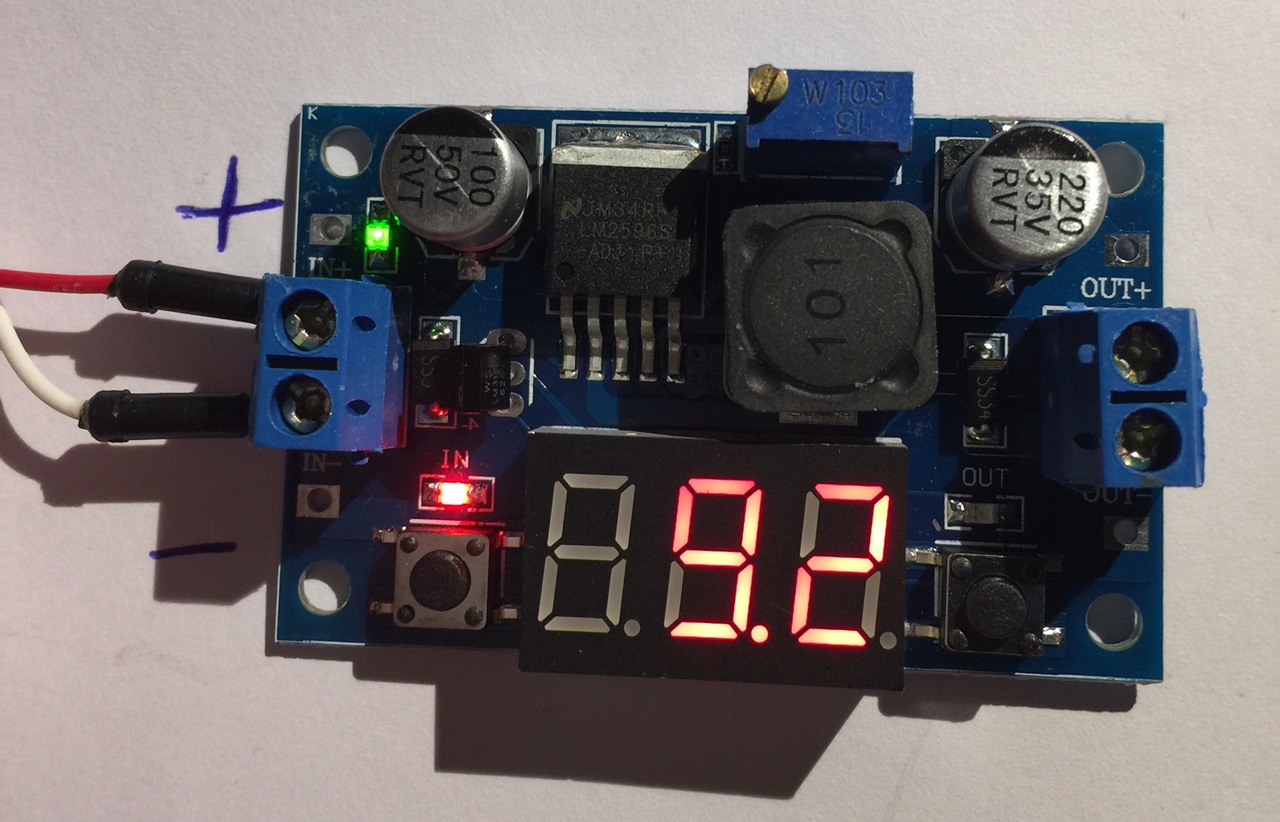
11. Press the rightkey to let the display show the input or output voltage. when the right “OUT” led light, it shows output, the left “IN” led show input.
Ok, dann mal der erste Test. Mal als Eingangsspannung eine 9 Volt Batterie angeklempt, die Eingangsspannung kann auch angezeigt werden:
Wahlweise wird auch die Ausgangsspannung angezeigt. Die kann über das Poti verändert werden. Cool!
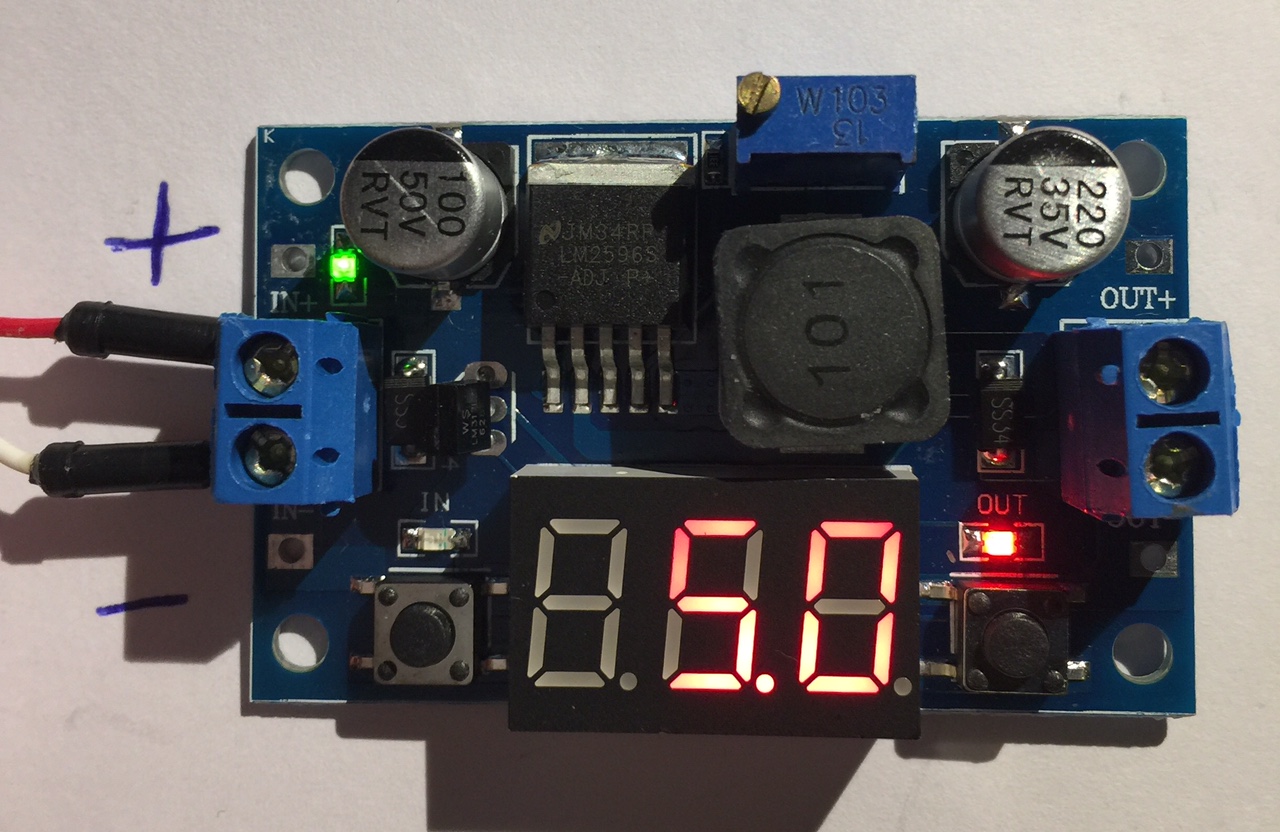
Dann werde ich mal einen Raspberry Pi anschließen oder was anderes …
Auf der Platine ist ein LM2596 verbaut, das Datenblatt von TI gibt es hier.
Hier noch die Anleitung und ein Hinweis wenn es nicht „geht“: „Für 1,99 Euro inkl. Versand aus China eingetroffen: DC-DC Spannungsregler LM2596 Step-Down Regler einstellbar mit LED Voltmeter“ weiterlesen
