Squawk-Codes, auch Transpondercodes genannt, sind standardisierte vierstellige Oktalzahlen (Ziffern 0–7), die Piloten in den Bordtransponder eingeben, um Luftfahrzeuge für die Flugsicherung (ATC) eindeutig identifizierbar zu machen. Im Notfall dienen spezifische Codes der ICAO als universelle Signale, die unabhängig von Sprachbarrieren oder Funkausfällen priorisierte Maßnahmen auslösen.

Notfallcode 7700
Der Code 7700 signalisiert einen allgemeinen Luftnotfall, wie Triebwerksausfall, medizinische Probleme oder technische Defekte. ATC räumt dem Flugzeug sofort Priorität ein, bereitet Notdienste vor und koordiniert den Luftraum. Merkspruch: „Seven-seven – going to heaven“.
Notfallcode 7600
7600 wird bei Funkausfall (Kommunikationsverlust) aktiviert, ermöglicht aber weiterhin Positionsübertragung via Sekundärradar. ATC passt umliegende Verkehrsteilnehmer an und leitet das Flugzeug sicher zur Landung. Merkspruch: „Seven-six – hear nix“.
Notfallcode 7500
7500 steht für Flugzeugentführung oder unrechtmäßige Einflussnahme (Hijacking), wobei Piloten den Code diskret setzen, um Entführer nicht zu alarmieren. ATC initiiert Sicherheitsprotokolle mit Behörden, ohne direkte Bestätigung. Merkspruch: „Seven-five – man with a knife“.
Diese Codes sind global einheitlich und entscheidend für die aviative Sicherheit, da sie auf Radarschirmen sofort auffallen. Piloten trainieren ihre diskrete Anwendung regelmäßig.
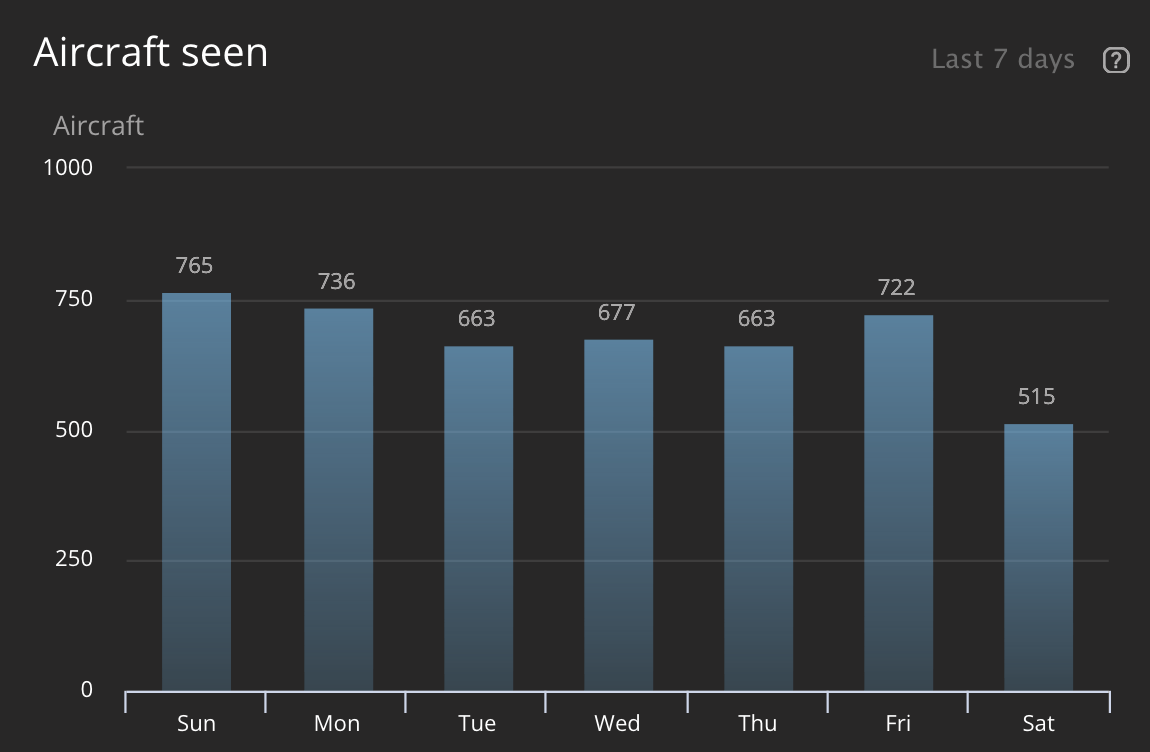
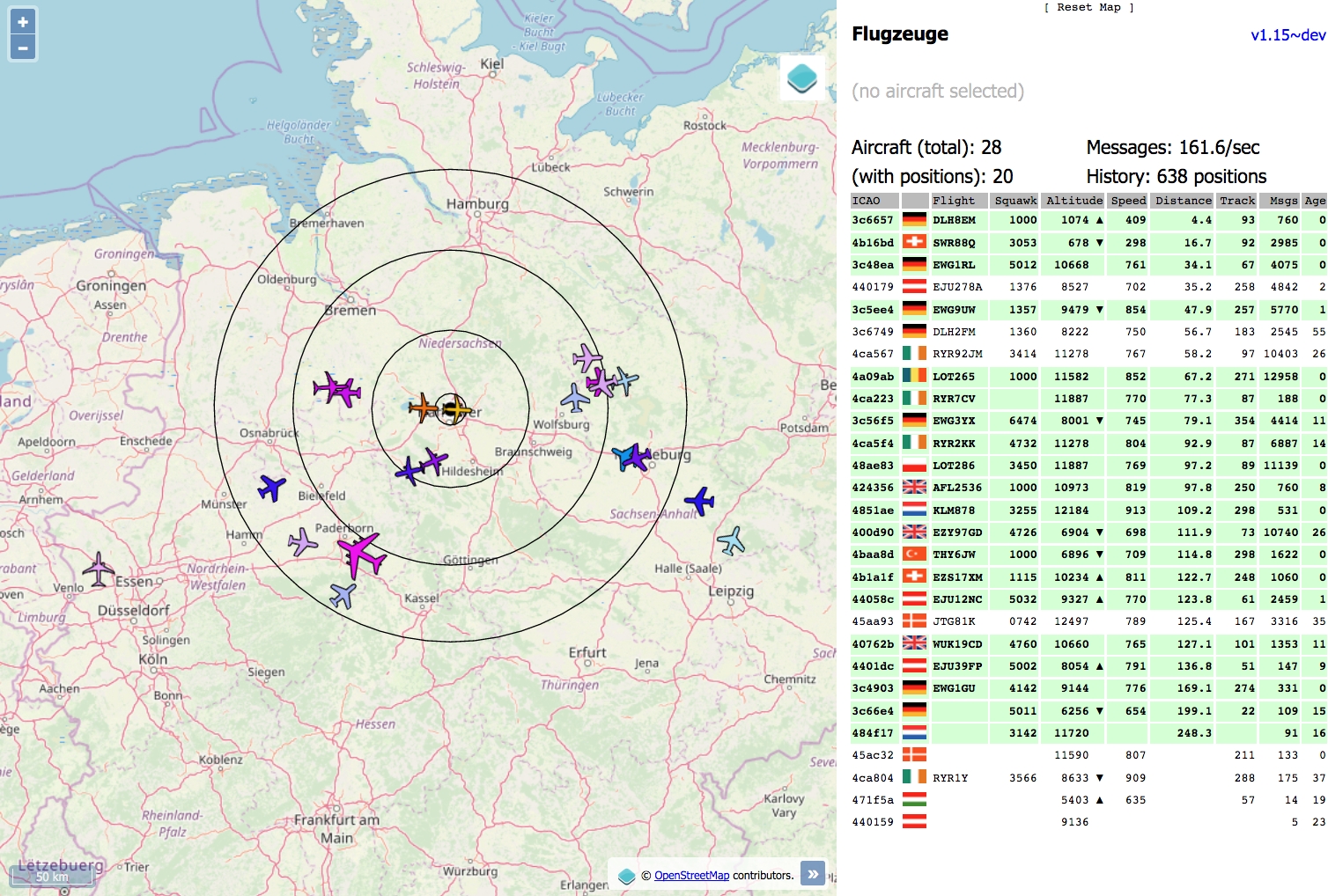
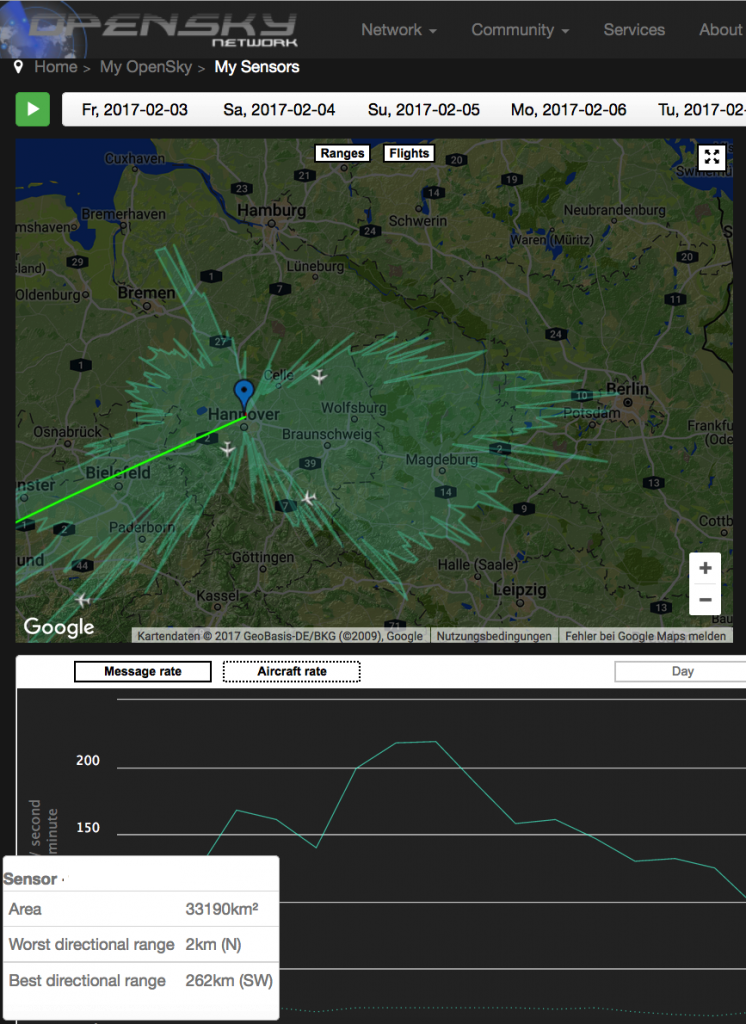
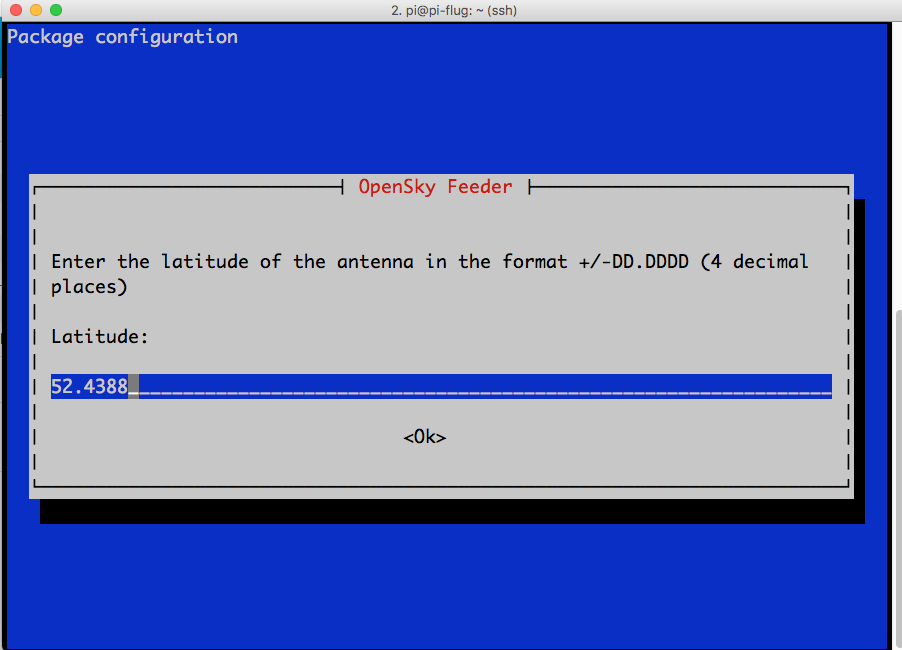
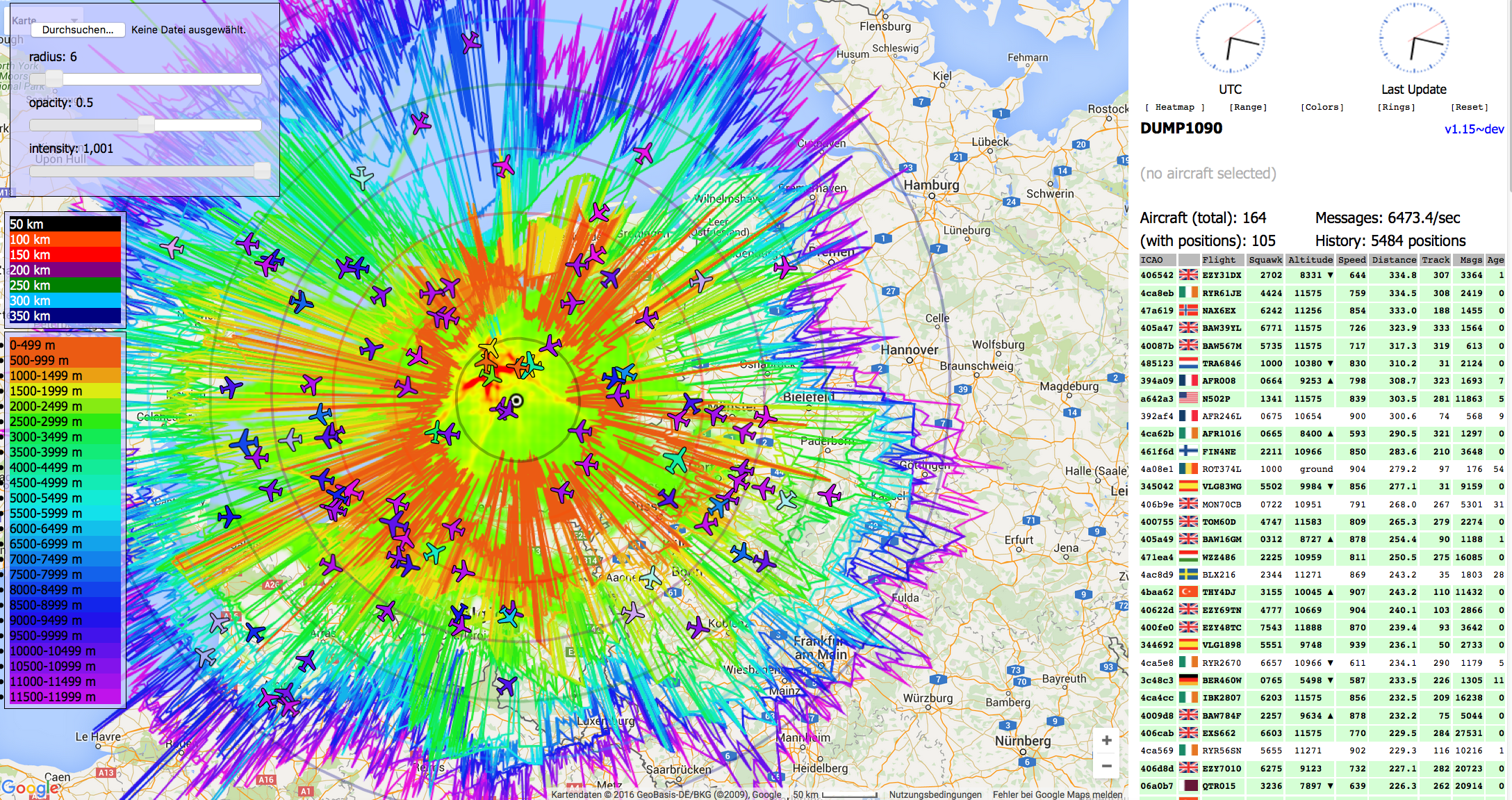
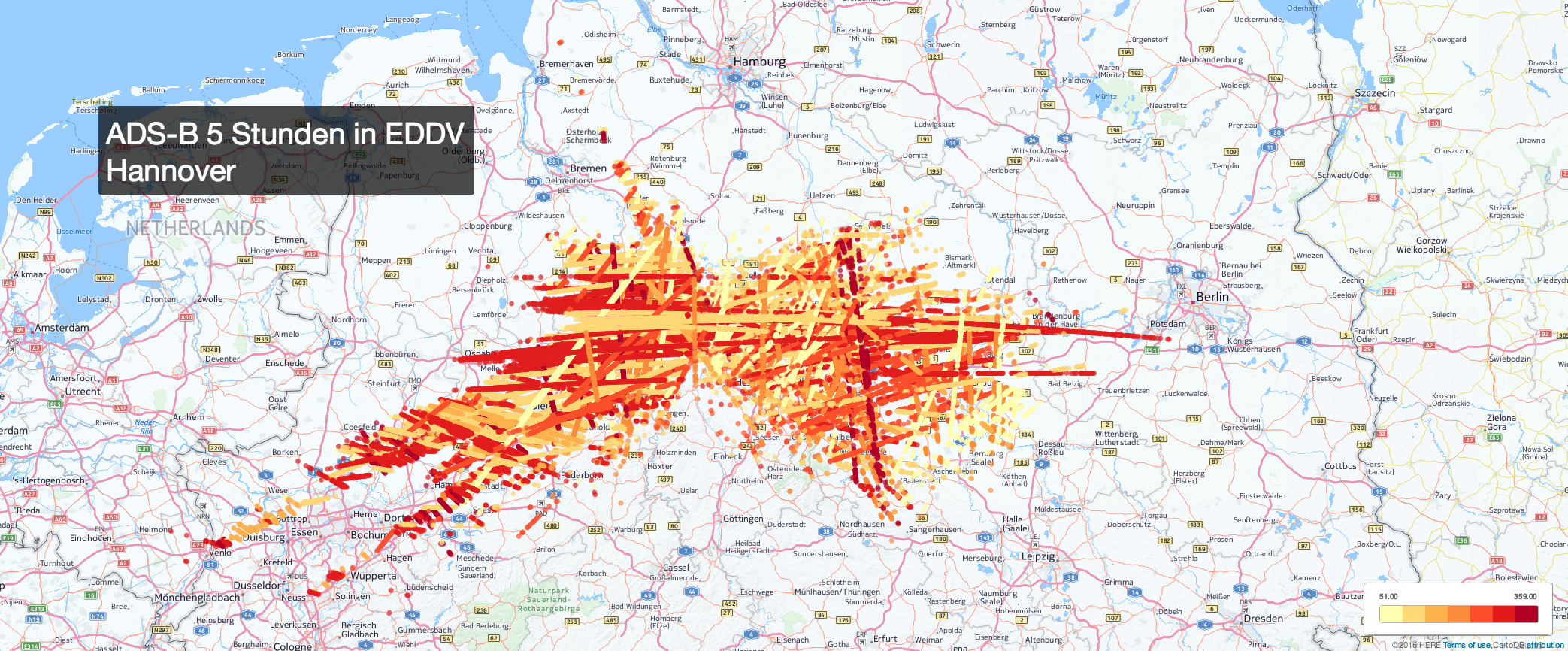
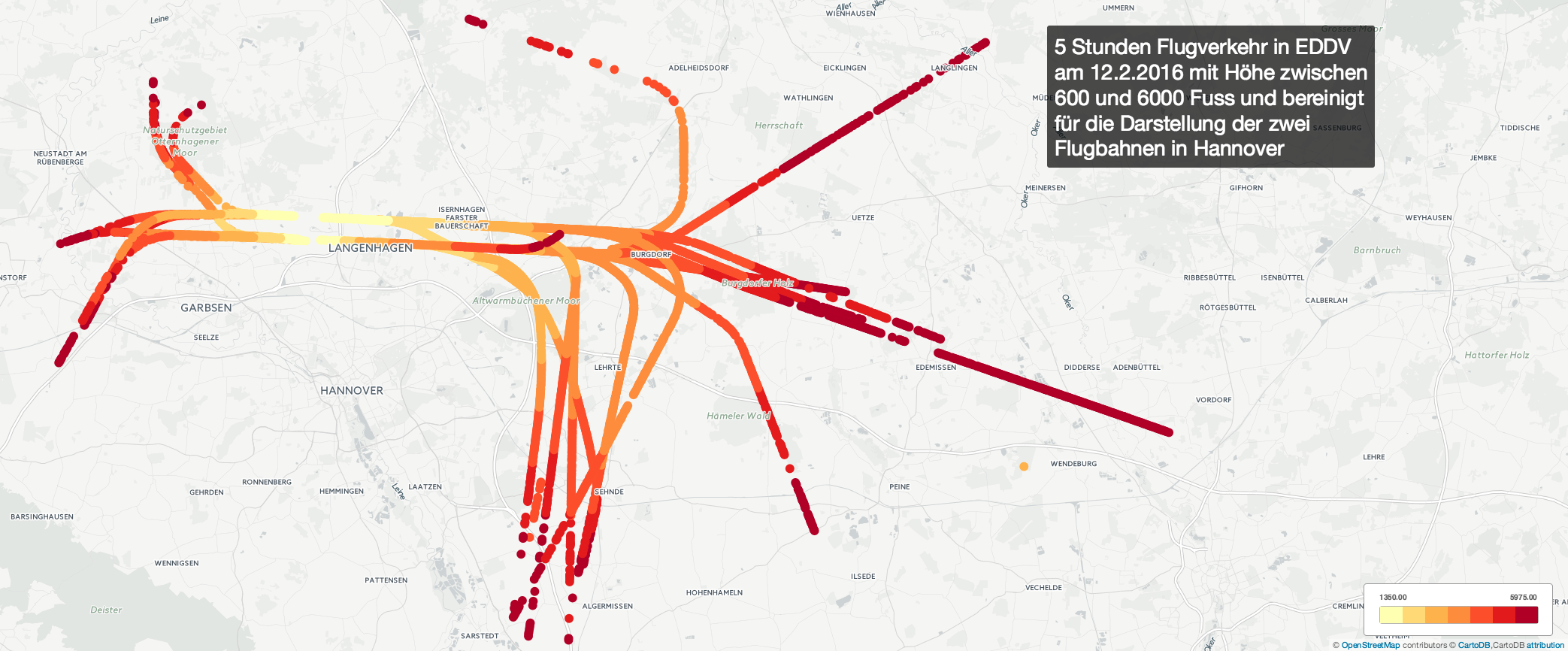
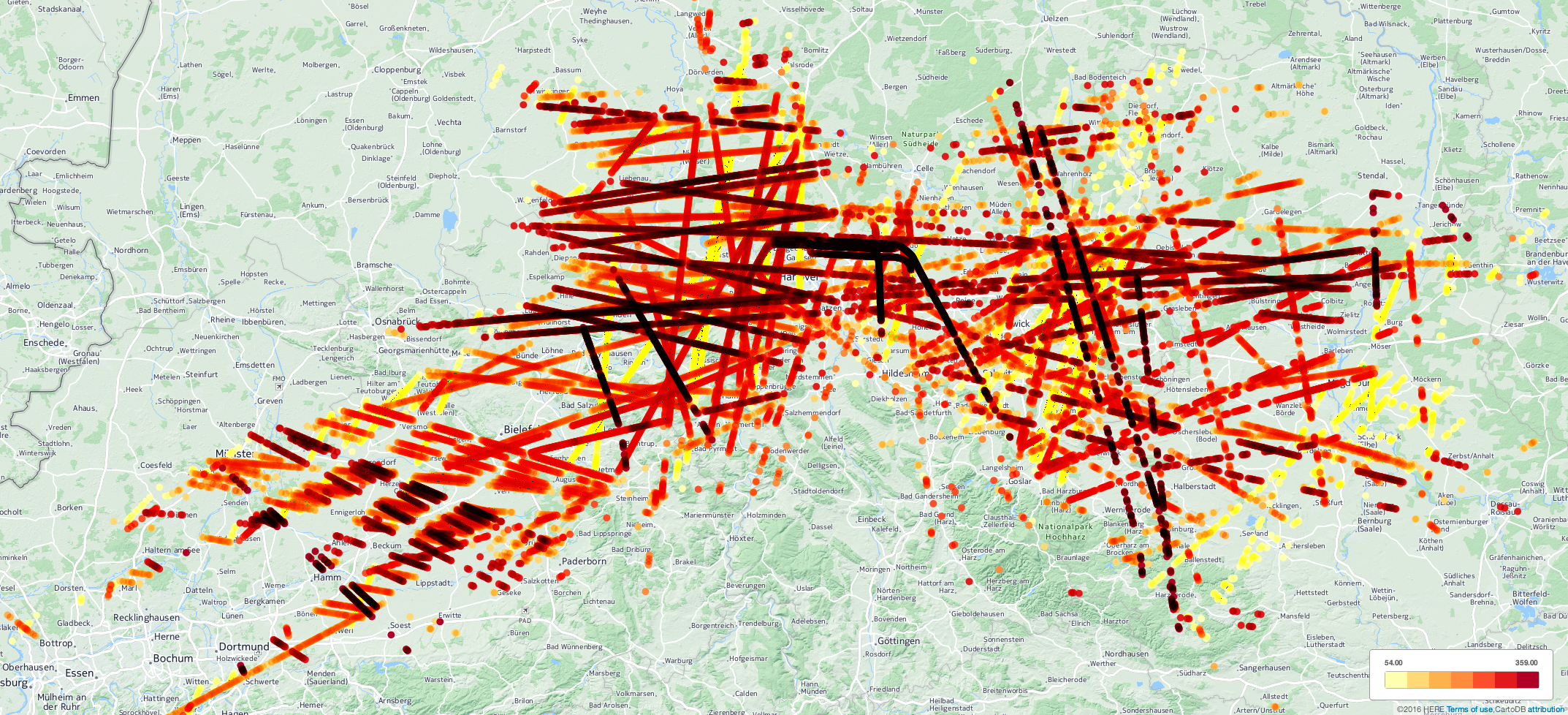
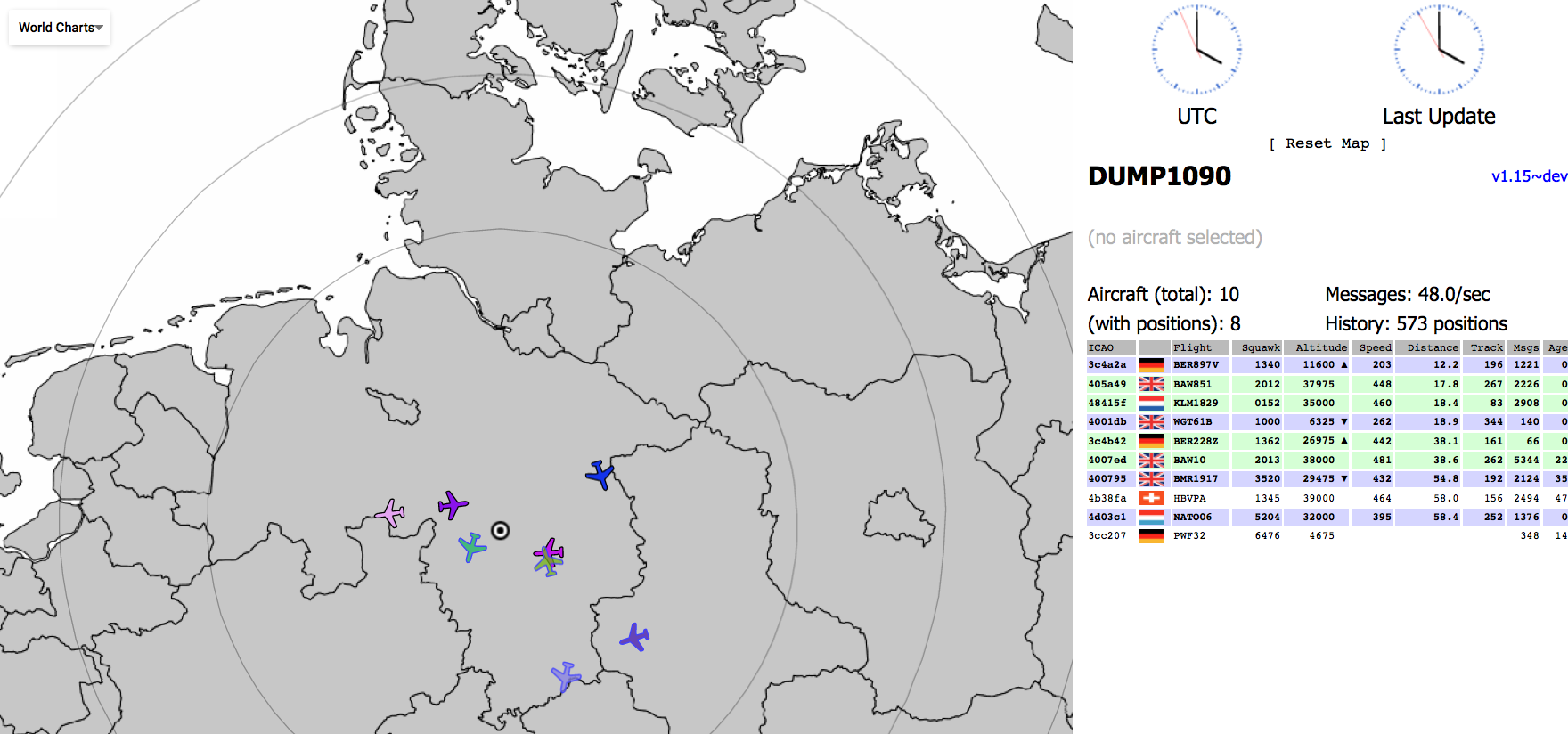
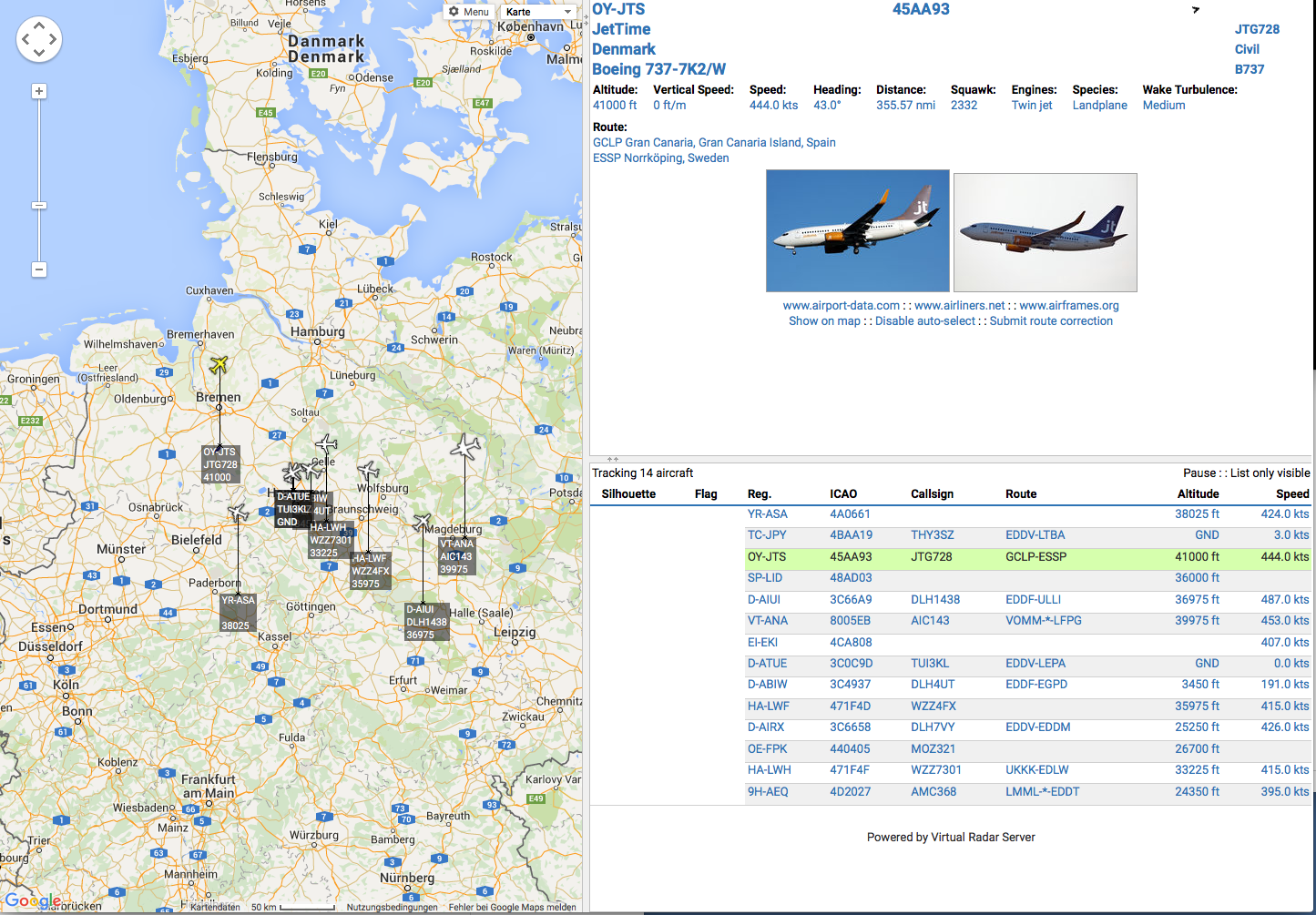
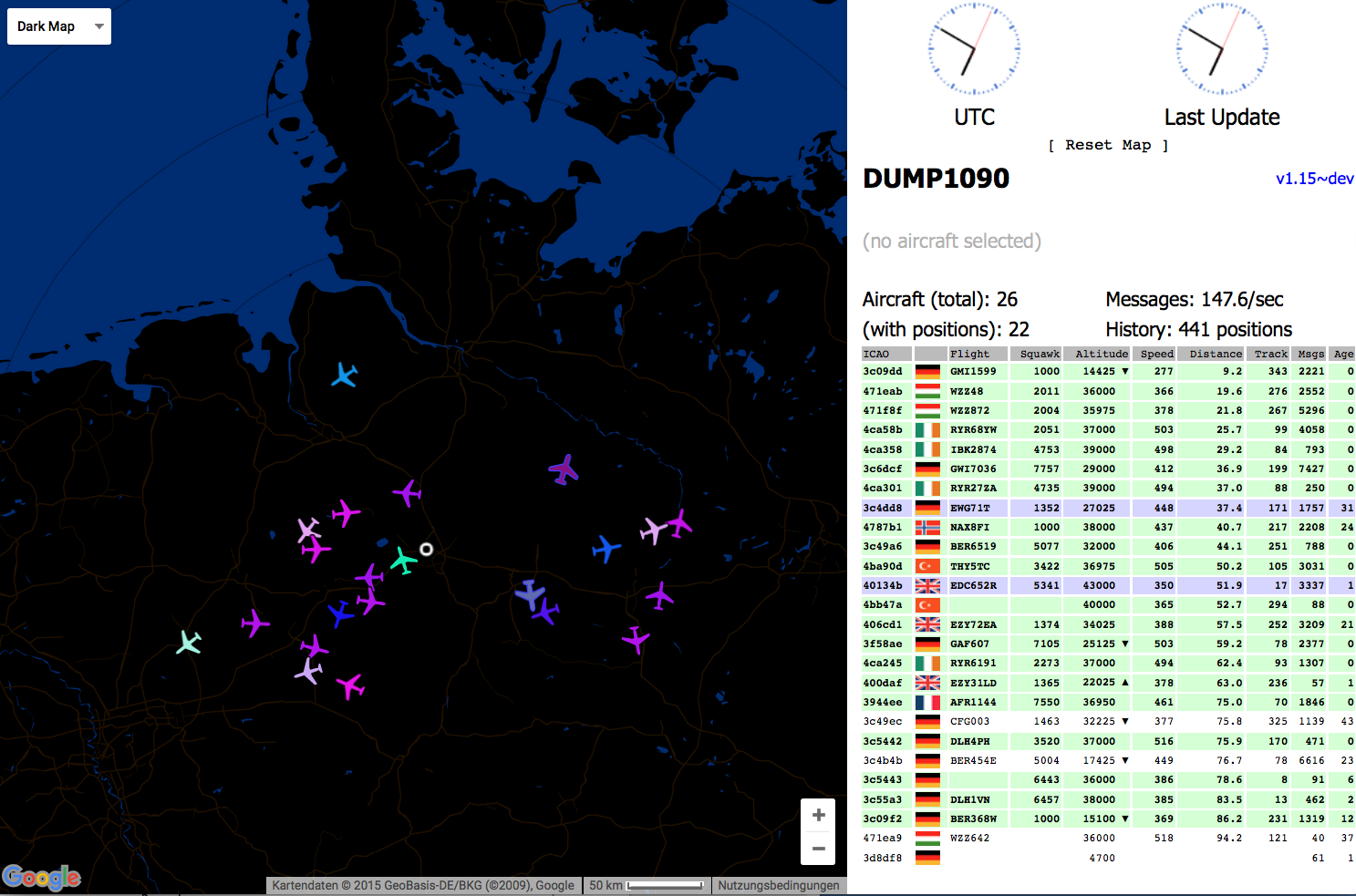
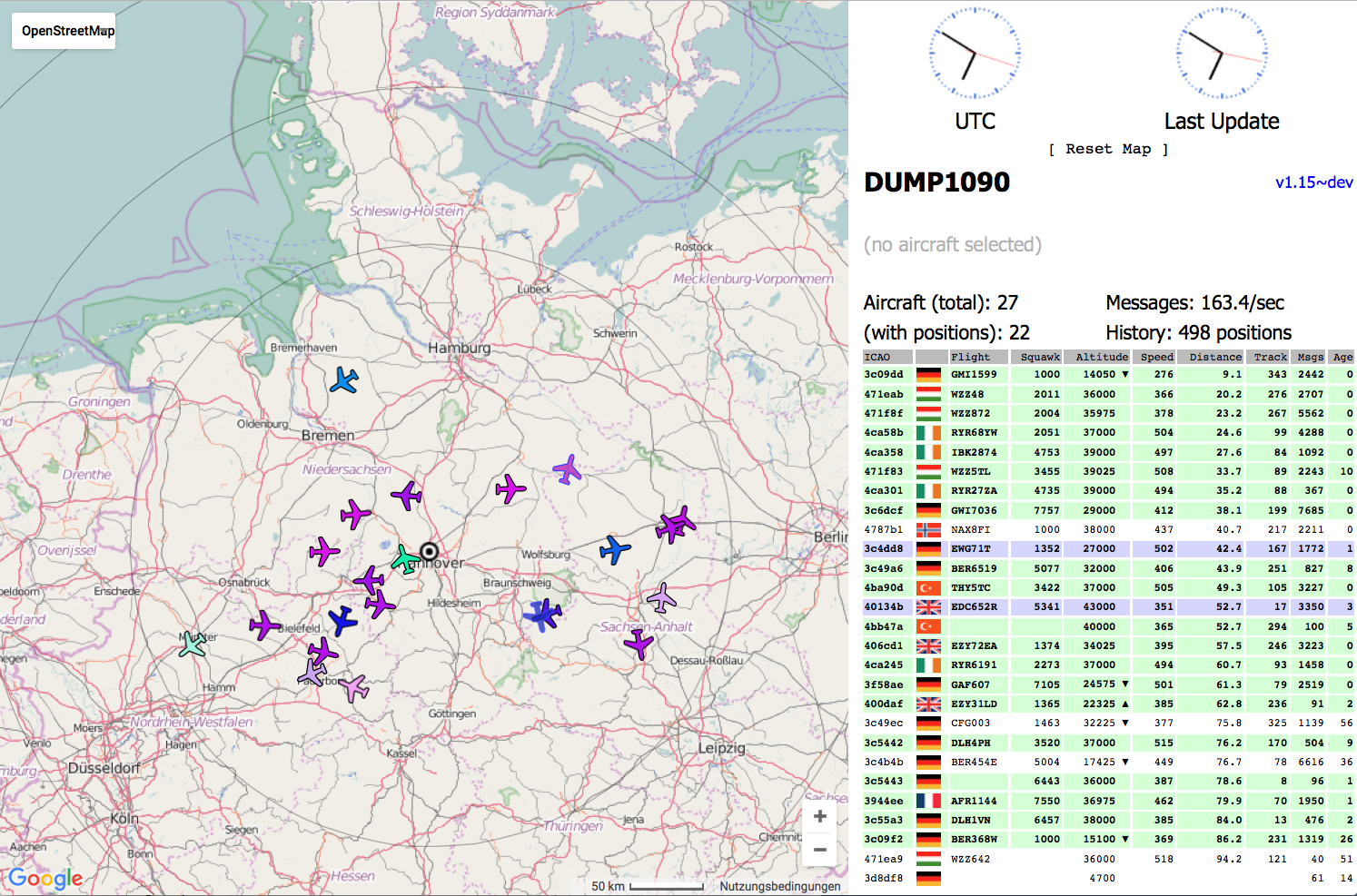
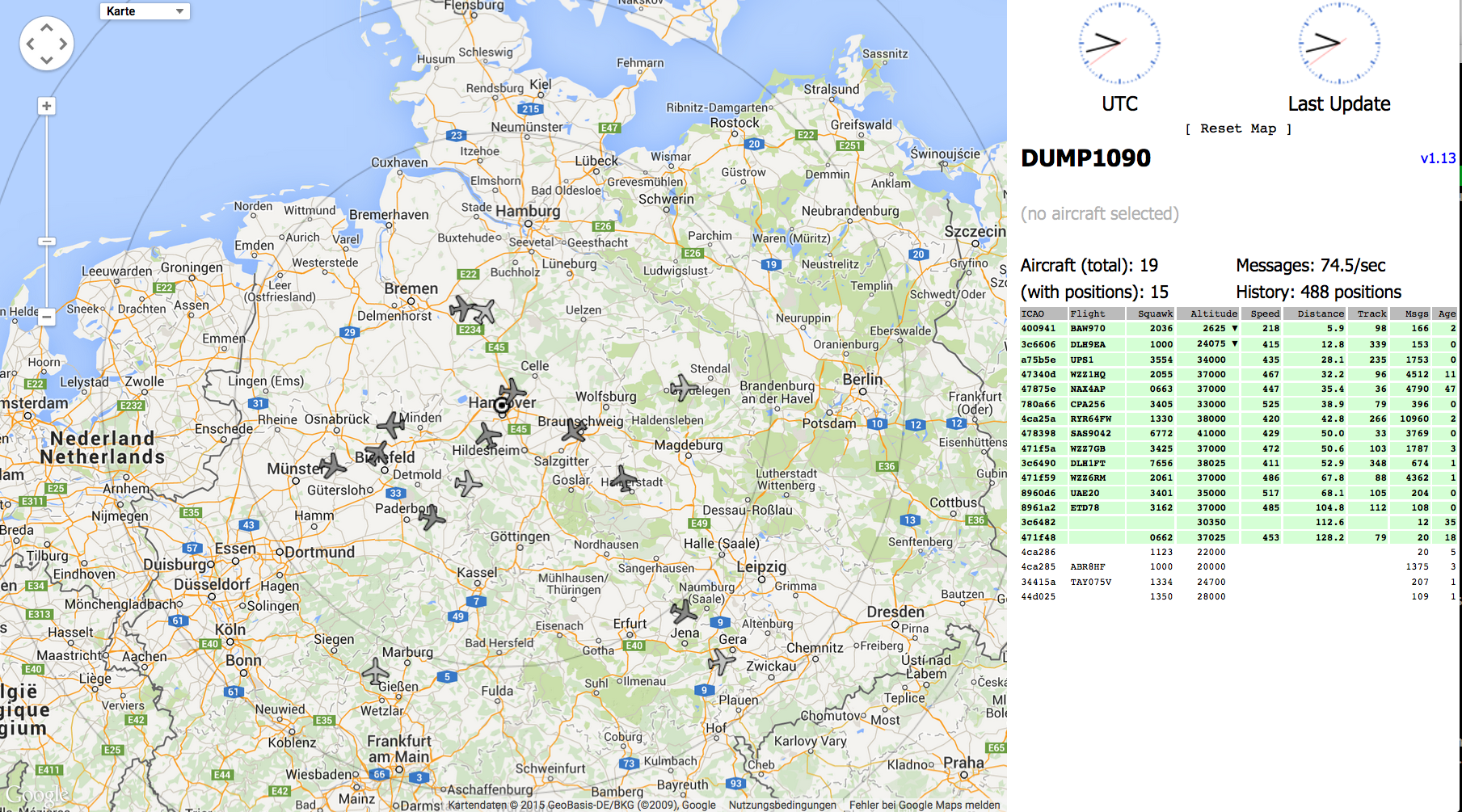
Das kann nun mit meinem Flight Monitor 2.3.0 angezeigt und ermittelt werden, hier ein Beispiel:
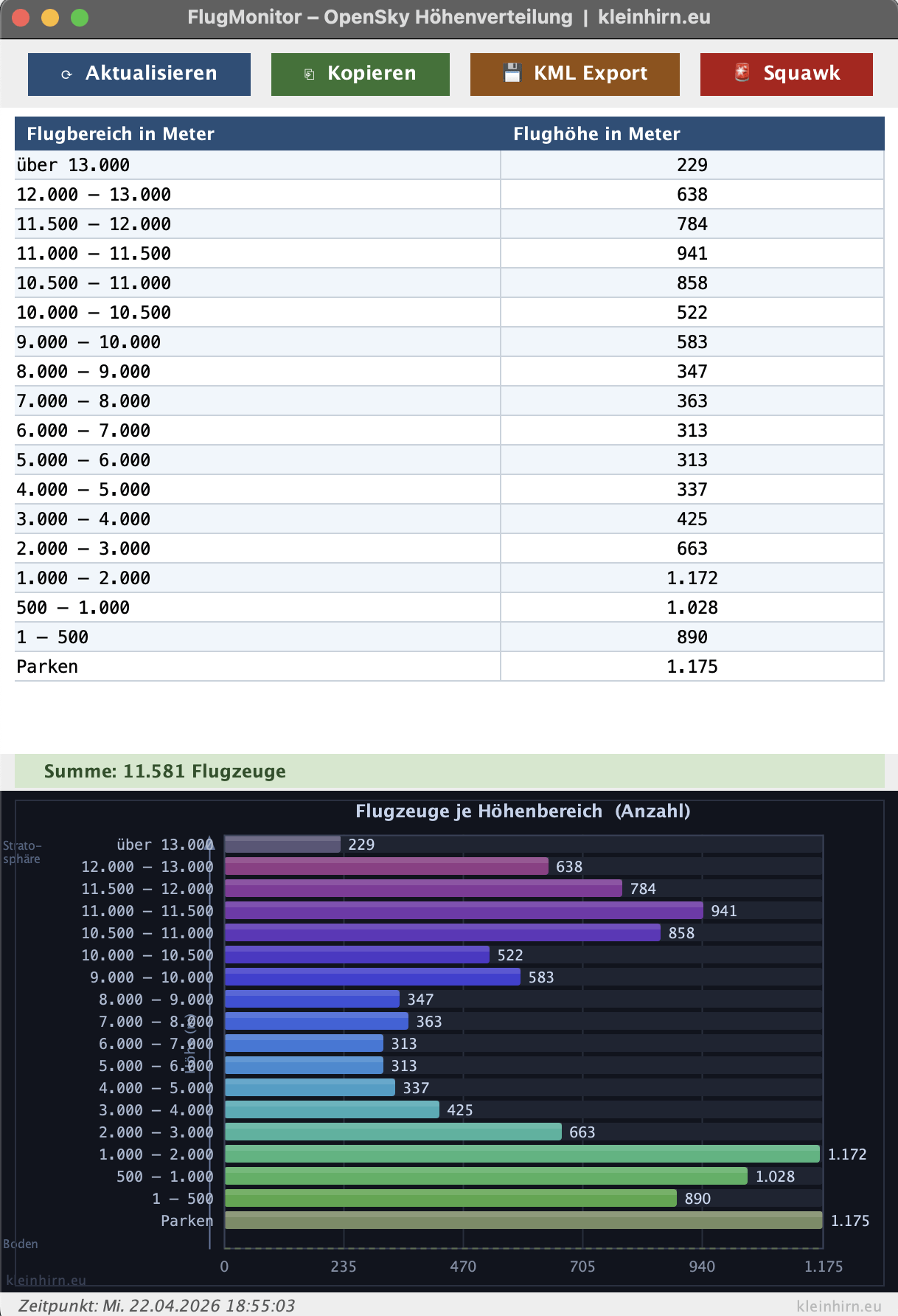
Bei klick auf den Roten Button, z.B. „Squawk-Codes, auch Transpondercodes weltweit anzeigen: „Seven-seven – going to heaven“ – „Seven-six – hear nix“ – „Seven-five – man with a knife““ weiterlesen