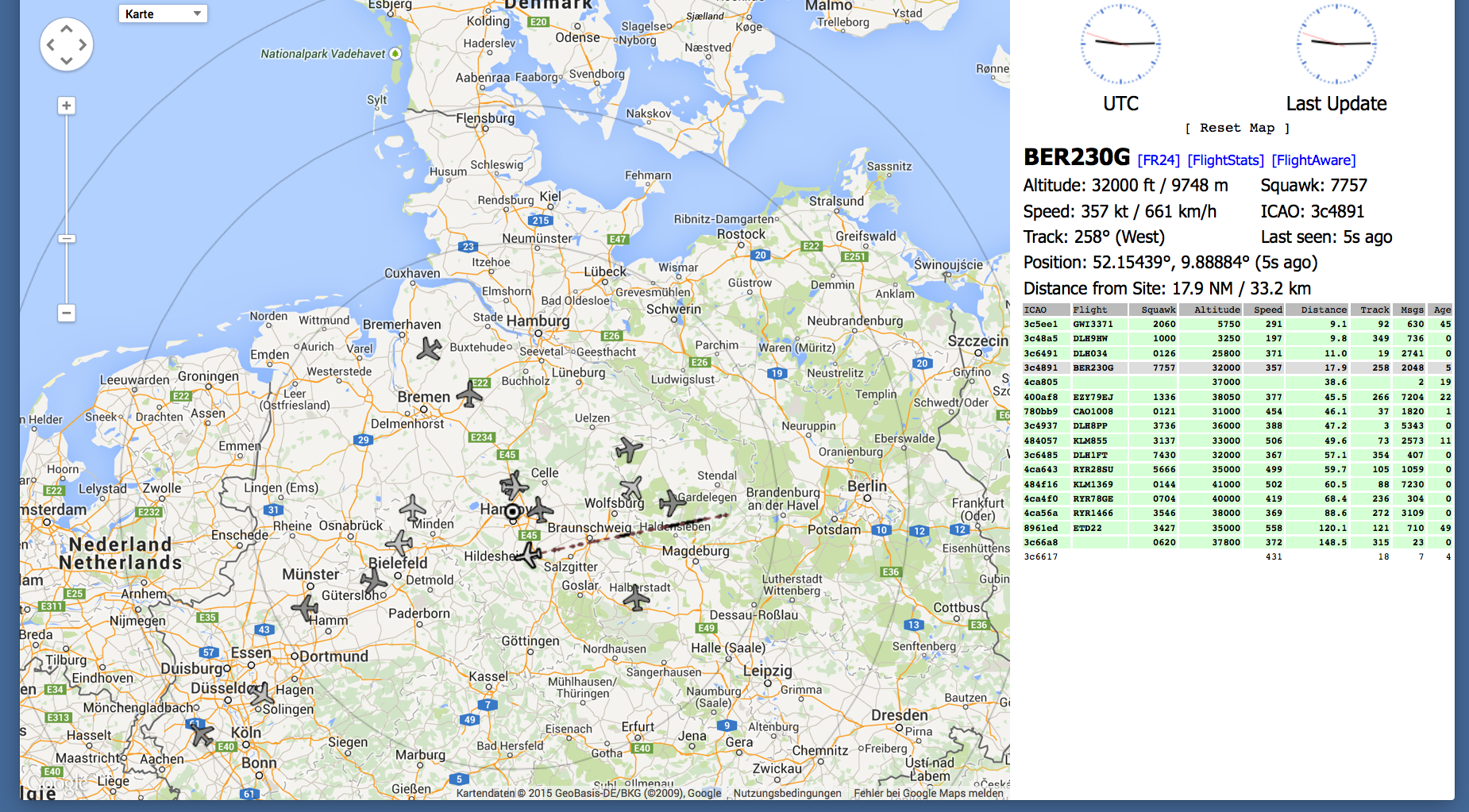
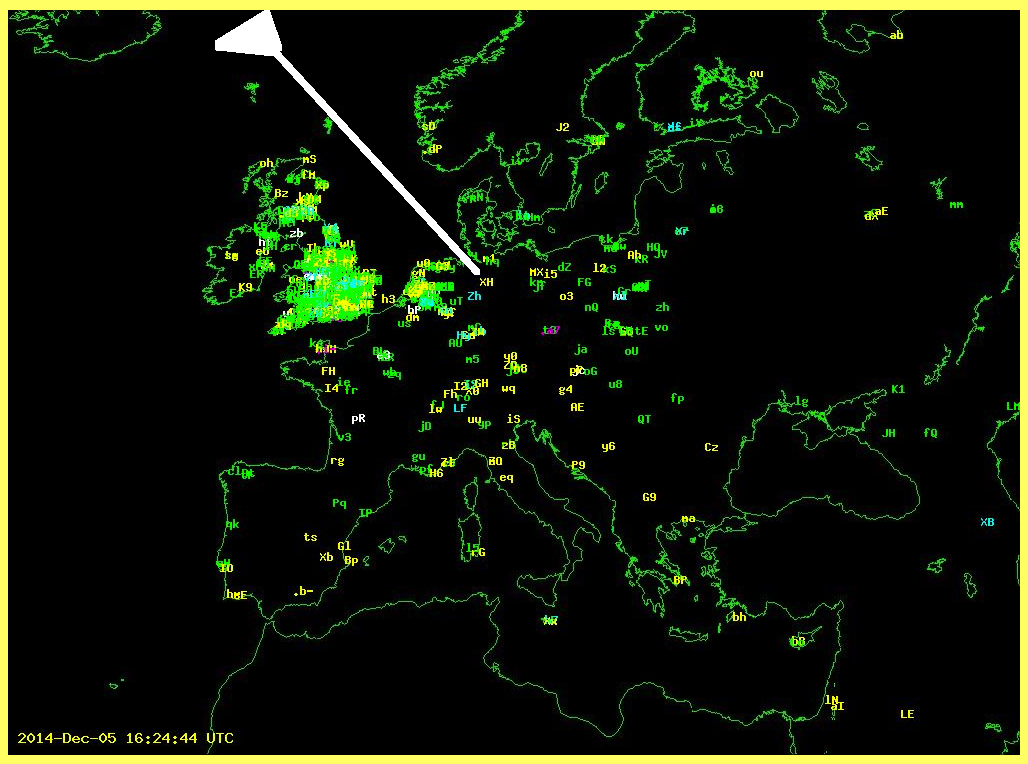
In Hannover wird von der Lufthansa noch nicht gestreikt. Hier die Flugzeuge die vom Raspberry Pi empfangen werden. Mal als dark map:
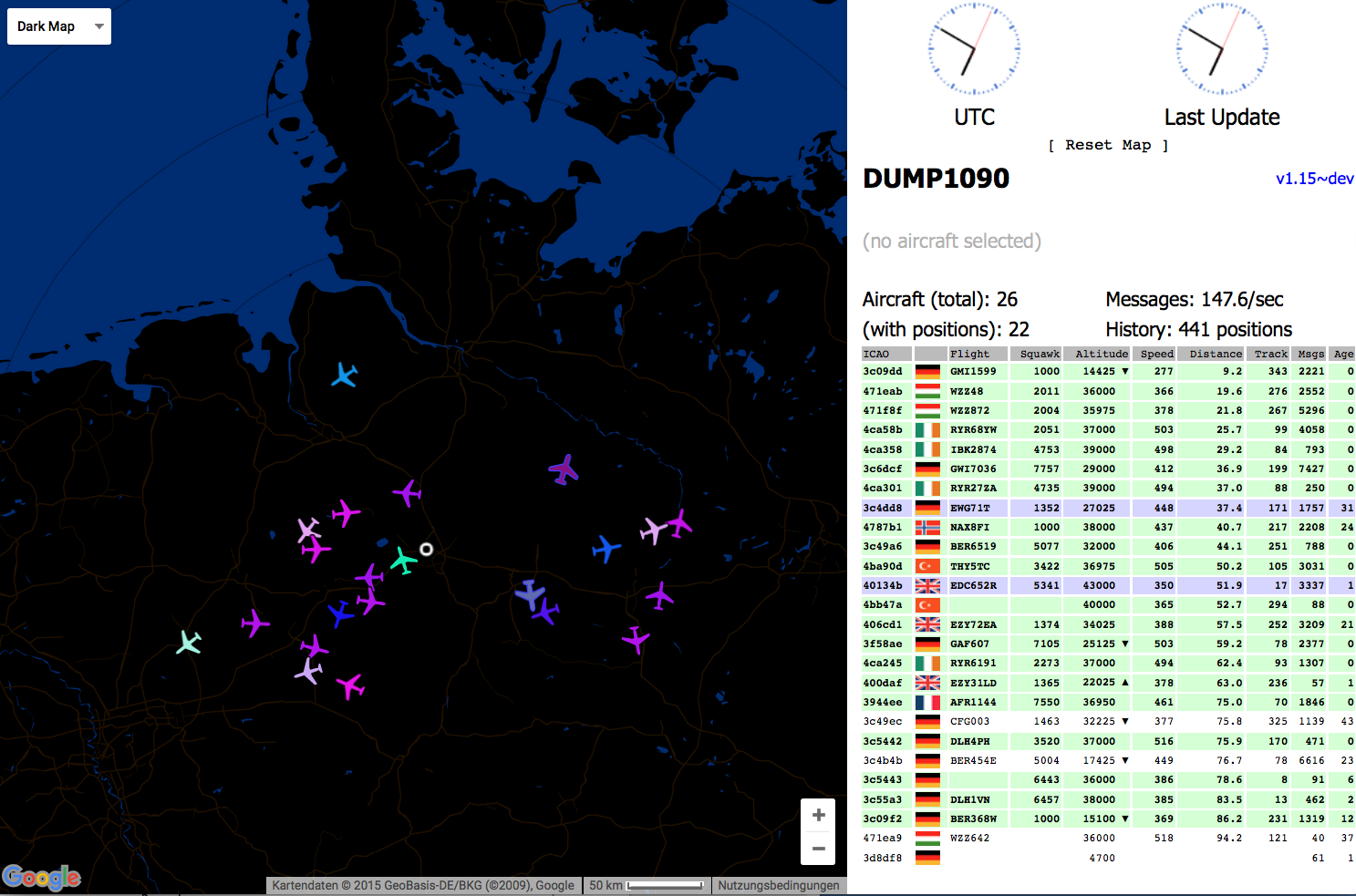
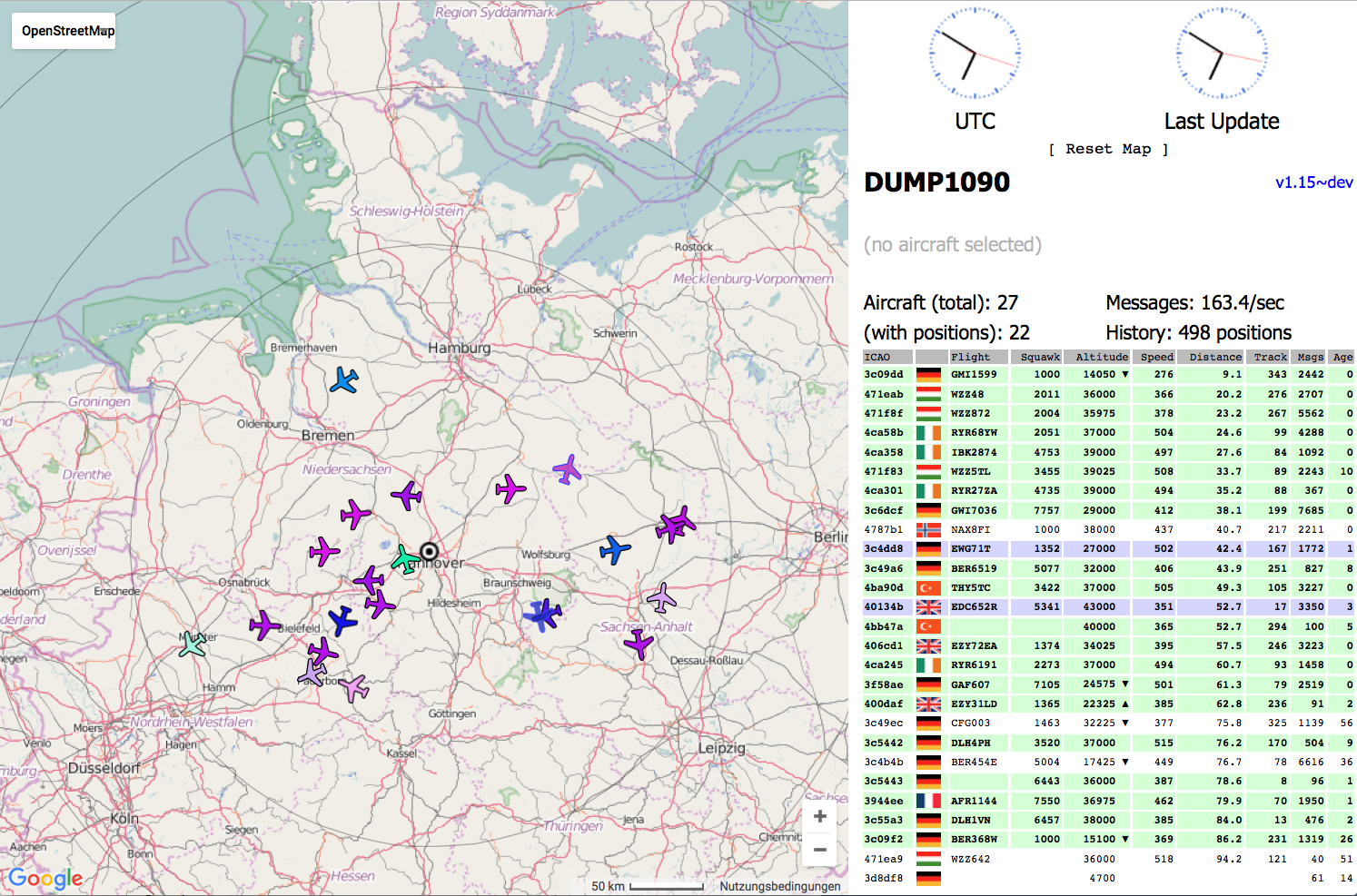
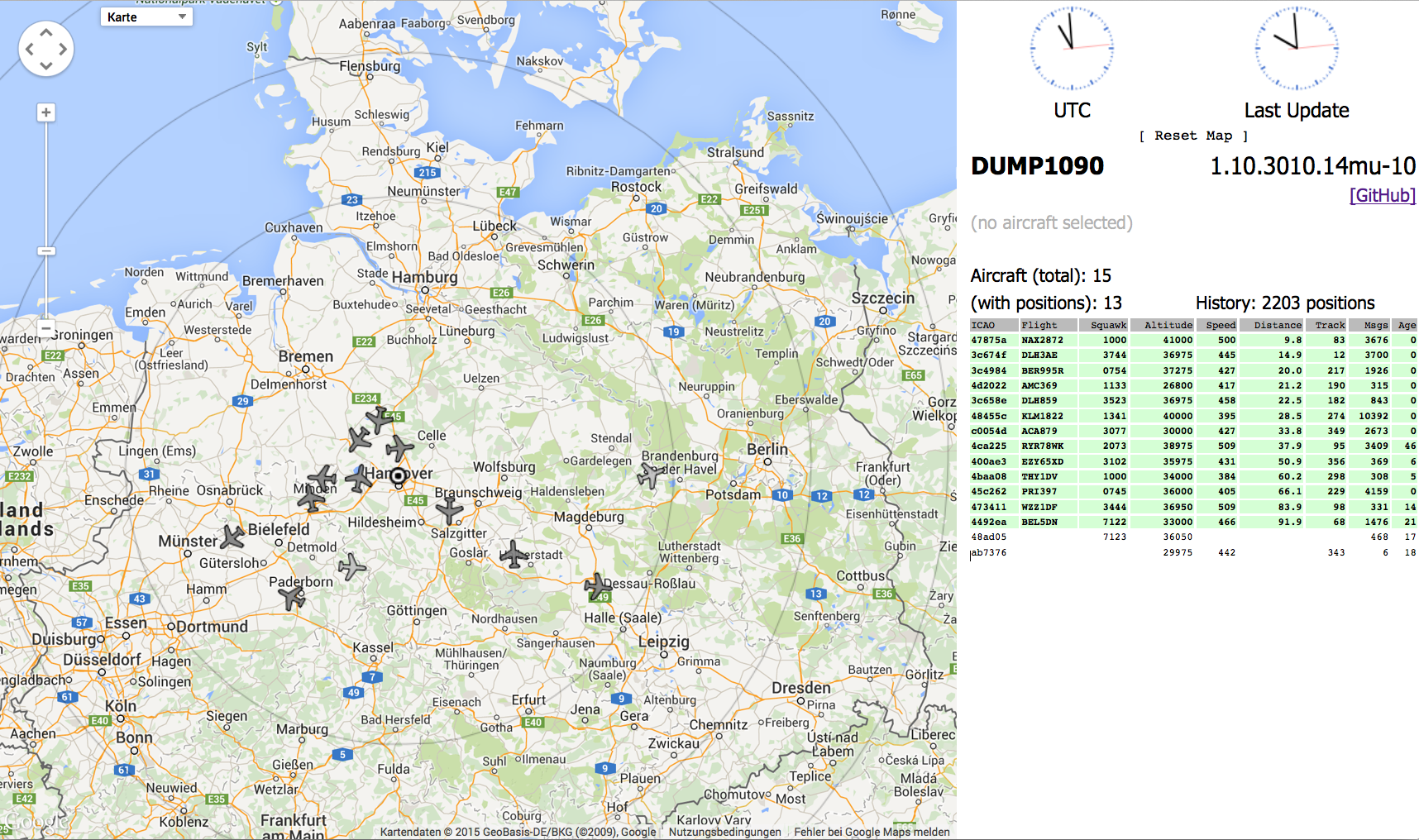
Und als OpenStreetMap:
Wenzlaff.de – Rund um die Programmierung
mit Java, Raspberry Pi, SDR, Linux, Arduino, Sicherheit, Blender, KI, Statistik, Krypto und Blockchain
In Hannover wird von der Lufthansa noch nicht gestreikt. Hier die Flugzeuge die vom Raspberry Pi empfangen werden. Mal als dark map:
Und als OpenStreetMap:
Für dump1090-mutability gibt es bis jetzt noch kein Release, das auch MLAT anzeigen kann.
Multilateration oder kurz MLAT errechnet die Position eines Flugzeuges anhand seiner ModeS-Daten. Dazu sind mindestens vier MLAT-fähige Bodenstationen in einem Gebiet von etwa 250 km Radius nötig, um entsprechend qualitative Positionsdaten mit einer Abweichung unter 100 Metern zu liefern. Mit MLAT können nur Flüge über eine Flughöhe von 10.000 ft dargestellt werden, für die Flugbereiche darunter würde ein engmaschiges Netz von mind. vier MLAT-Empfangsstationen benötigt, um eine möglichst Abdeckung erreichen zu können.
Damit auch MLAT Flugzeuge angezeigt werden können, muss aus den aktuellsten Sourcen ein Install-Package erzeugt und installiert werden. Das geht in einer halben Stunde wie folgt:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 |
# Hilfs Package installieren sudo apt-get install librtlsdr-dev libusb-1.0-0-dev pkg-config debhelper git-core # Libs landen und installieren wget https://github.com/mutability/librtlsdr/releases/download/v0.5.4_git-1/librtlsdr0_0.5.4.git-1_armhf.deb wget https://github.com/mutability/librtlsdr/releases/download/v0.5.4_git-1/librtlsdr-dev_0.5.4.git-1_armhf.deb sudo dpkg -i librtlsdr0_0.5.4.git-1_armhf.deb sudo dpkg -i librtlsdr-dev_0.5.4.git-1_armhf.deb # Verzeichnis erstellen und in das Verzeichnis wechseln mkdir neue-dev-version cd neue-dev-version/ # Aktuellen Entwicklungsstand holen git clone https://github.com/mutability/dump1090.git # in das Dump1090 Verzeichnis gehen cd dump1090 # Package bauen, das dauert ein paar Minuten (ca. 10) dpkg-buildpackage -b # in das Verzeichnis mit dem neuen Package wechseln und das erzeugt Package installieren cd .. sudo dpkg -i dump1090-mutability_1.15~dev_armhf.deb |
Das Ergebnis sieht wie folgt aus:
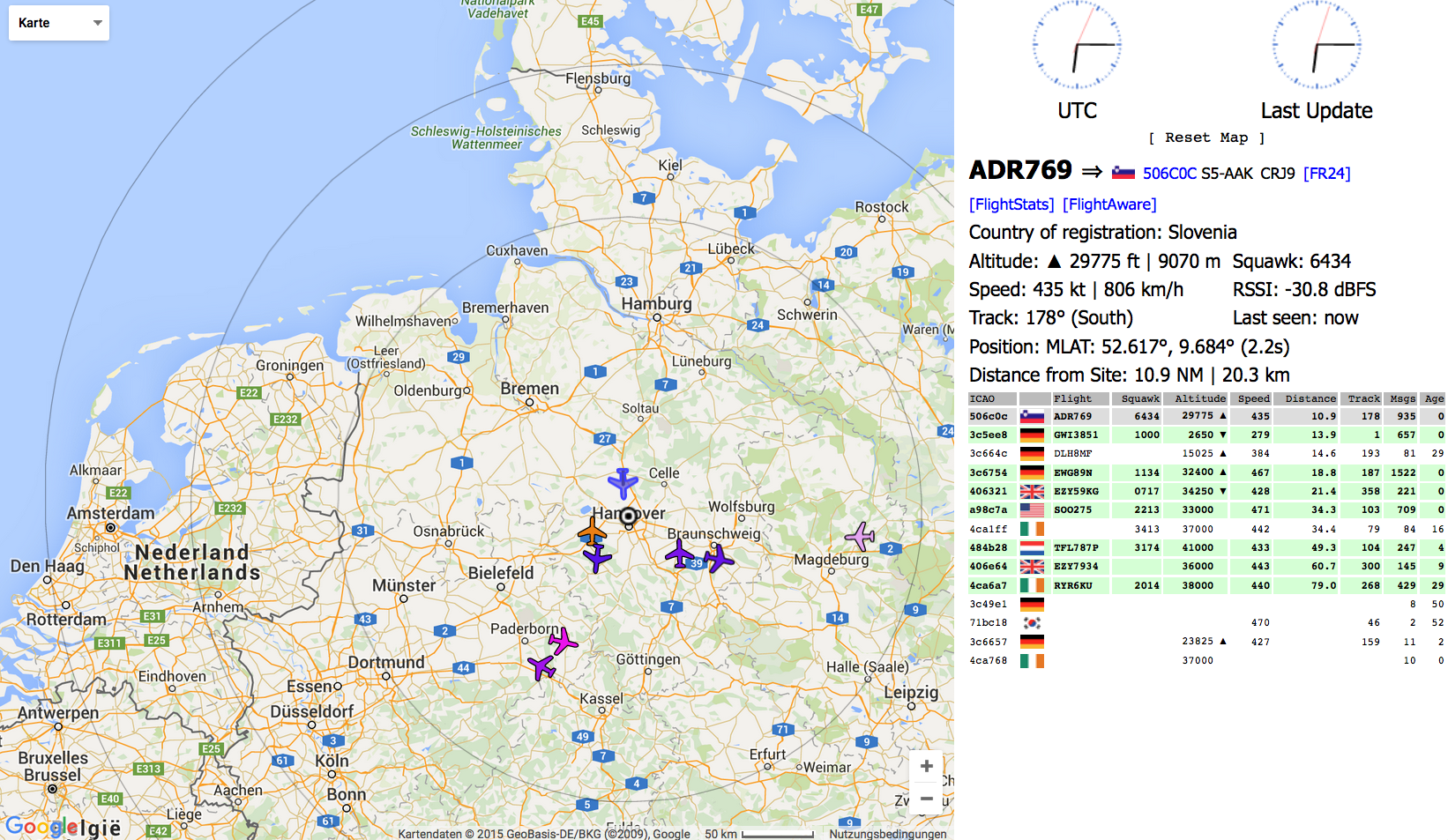
Oben rechts wird nun die neue Version angezeigt. Neu sind auch die angezeigten Flaggen und es werden jetzt auch alle Flugzeuge in der Tabelle und in der Karte lila angezeigt die keinen Transponder haben und per MLAT bestimmt werden.
Cool, ich bin begeistert! „Raspberry Pi: Wie kann die aktuellste Version v1.15-dev von dump1090-mutability für die Anzeige von MLAT installiert werden?“ weiterlesen
Hier hatte ich schon mal beschrieben wie PiAware 2.0.4 installiert wird. Am 28.9.2015 ist die Version 2.1-3 veröffentlicht worden. Wie kann nun auf diese aktuelle Version upgedated werden? Da der default Port geändert wurde, ist evl. noch eine kleine Portanpassung nötig.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 |
# Neue Version laden wget http://flightaware.com/adsb/piaware/files/piaware_2.1-3_armhf.deb # Server stoppen sudo /etc/init.d/piaware stop # Version updaten sudo dpkg -i piaware_2.1-3_armhf.deb # Version ausgeben piaware -v # Ausgabe: 2.1-3 # Server starten sudo /etc/init.d/piaware start # Wenn Fehlermeldung in der Form: Beast-format results connection with localhost:30104: [Errno 111] Connection refused dann den Port auf den alten 30004 setzenhttp://blog.wenzlaff.de/?p=6183&preview=true sudo piaware-config -mlatResultsFormat beast,connect,localhost:30004 # Restart sudo service piaware restart |
Auf der PiAware Seite die Site informationen checken:
|
1 2 3 4 5 6 7 |
Data Feed: Live - vor wenigen Sekunden Feeder Check-in: Live - vor wenigen Sekunden Joined: 30.11.2014 Longest Streak: 334 days (30.11.2014 - Today) Feeder Type: PiAware (Debian Package Add-on) 2.1-3 Multilateration (MLAT): Supported / Enabled (synchronized with 8 nearby receivers) |
sieht gut aus. Es können nun wieder alle Daten gesendet werden. Habe vor ein paar Tage in San Francisco diese Flugzeuge gesehen:

Ob die auch Transponder an Board hatten? „Raspberry Pi: Wie wird die neue Version von PiAware von 2.0.4 auf 2.1-3 upgedated?“ weiterlesen
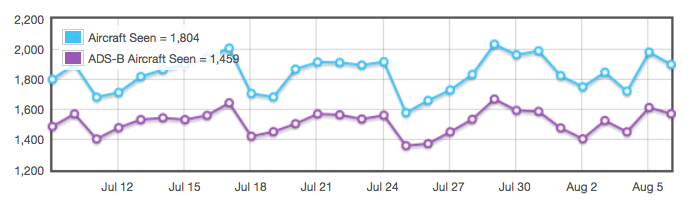
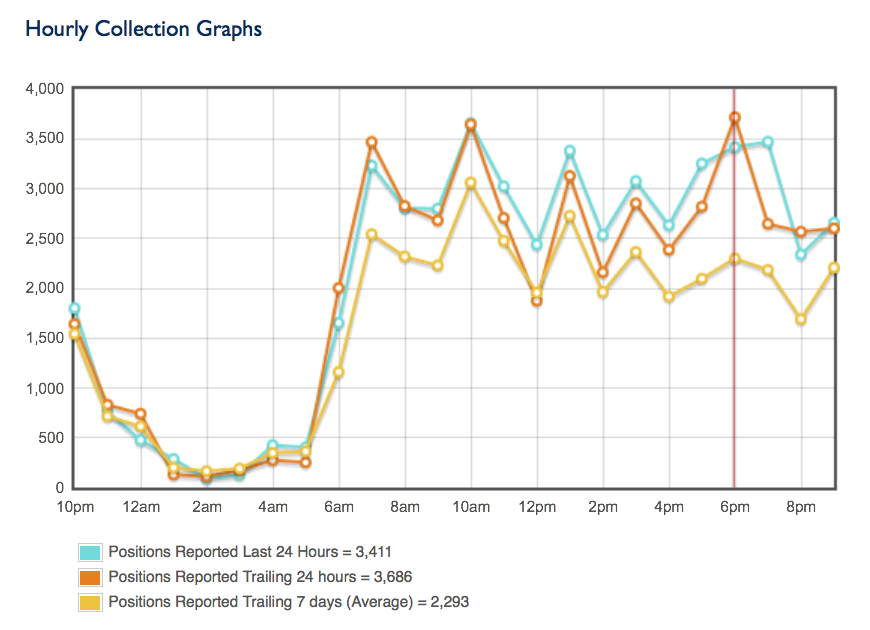
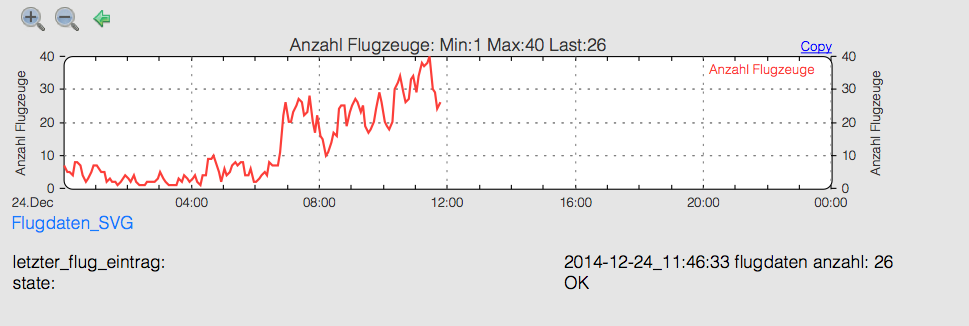
Der Flughafen in Hannover (Langenhagen) meldet ein Plus im Juli von 6,5 %. Das habe ich mal mit dem Raspberry Pi mit DUMP1090 validiert.
Hier das Ergebnis der Auswertung:
Es gibt eine neue Version für den Raspberry Pi von PiaAware und zwar die Version 2.0.4.
Mit diesen und anderen Änderungen:
Wie wird nun ein update durchgeführt:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 |
# System aktualisieren sudo apt-get update sudo apt-get upgrade # erstmal schauen welche Version läuft piaware -v # Ausgabe: 1.20-1 # Client stoppen sudo /etc/init.d/piaware stop # Archive laden wget http://flightaware.com/adsb/piaware/files/piaware_2.0-4_armhf.deb #--2015-06-10 21:54:18-- http://flightaware.com/adsb/piaware/files/piaware_2.0-4_armhf.deb #Resolving flightaware.com (flightaware.com)... 70.42.6.250 #Connecting to flightaware.com (flightaware.com)|70.42.6.250|:80... connected. #HTTP request sent, awaiting response... 200 OK #Length: 2494234 (2.4M) [application/x-debian-package] #Saving to: `piaware_2.0-4_armhf.deb' # #100%[======================================>] 2,494,234 1023K/s in 2.4s # #2015-06-10 21:54:21 (1023 KB/s) - `piaware_2.0-4_armhf.deb' saved [2494234/2494234] # # Installieren sudo dpkg -i piaware_2.0-4_armhf.deb #(Reading database ... 73563 files and directories currently installed.) #Preparing to replace piaware 1.20-1 (using piaware_2.0-4_armhf.deb) ... #Unpacking replacement piaware ... #Setting up piaware (2.0-4) ... #[ ok ] Starting piaware server: piaware. #Processing triggers for man-db ... # Version checken piaware -v # Ausgabe: 2.0-4 # Checken ob alles noch läuft sudo piaware -debug # Ausgabe # .. # piaware has successfully sent several msgs to FlightAware! # 17 msgs recv'd from dump1090-mutab; 17 msgs sent to FlightAware # Alles ok |
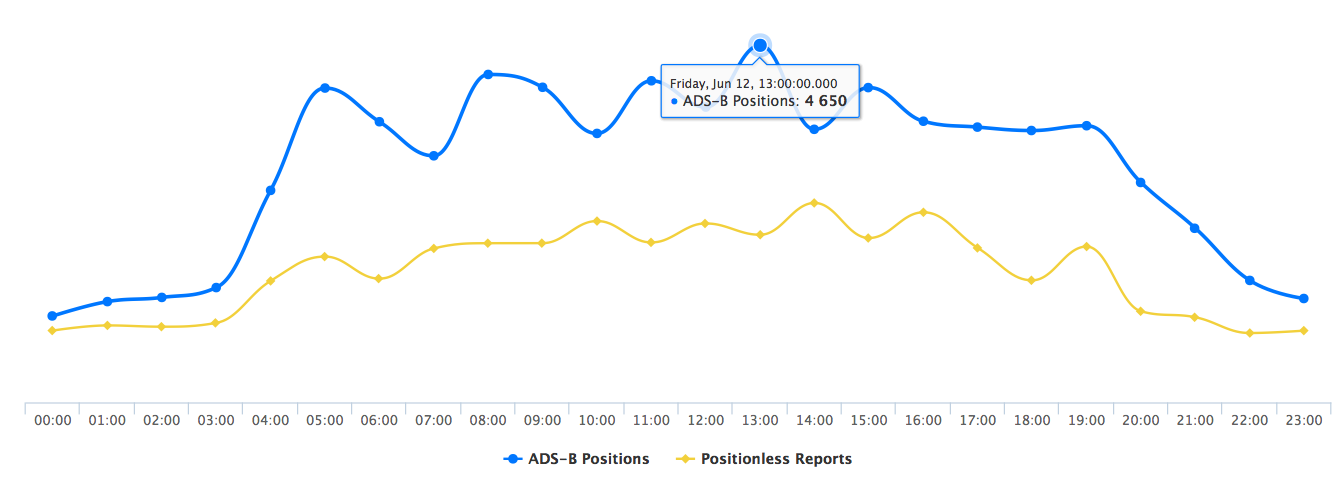
Es läuft nun mit der aktuellen Version. Hier mal die Auswertung von heute aus Langenhagen (EDDV – Hannover):
Mein Raspberry Pi wird seit einiger Zeit zum empfangen von Transponderdaten von Flugzeugen verwendet. Das habe ich hier auf dem Block schon mehrfach beschrieben. Wie können die empfangenen Daten nun aber an Planefinder.net gesendet werden. Voraussetzung ist eine laufende DUMP1090 installation.
Installation
Zuerst die aktuelle Client Version herunterladen und installieren:
|
1 2 3 4 5 6 7 |
# System aktualisieren sudo apt-get uddate suda apt-get upgrade # Plane Finder Client Beta3 (3.0.1657) laden wget http://client.planefinder.net/pfclient_3.0.1657_armhf.deb # installieren sudo dpkg -i pfclient_3.0.1657_armhf.deb |
Ausgabe:

Nun im Browser die angegebenen Adresse z.B. 127.0.0.1:30053 für die Konfiguration aufrufen. Dann einmal die lan und lon angeben oder auf Lokalisieren klicken und die Position auswählen. Dann die eigene E-Mail Adresse eingeben und auf „Create a new sharecode“ klicken. „Raspberry Pi: Wie können Transponder Flugdaten an PlaneFinder.net gesendet werden?“ weiterlesen
Wollte mal sehen, ob meine selbstgebaute Antenne, die an meinem Raspberry Pi hängt, von irgendwelchen Bergen abgeschattet wird. Da gibt die heywhatsthat.com. Für den Flugzeug Transponder empfang, mit 1090 Mhz gibt es ja nicht so große Hindernisse, da die meisten Flugzeuge um ca. 10 km Höhe fliegen. Aber auch um Höhenunterschiede zu visualisieren ist die Seite ganz gut. Von Langenhagen, das in ca. 62 m liegt, kann man schön nach Bremen runterschauen:
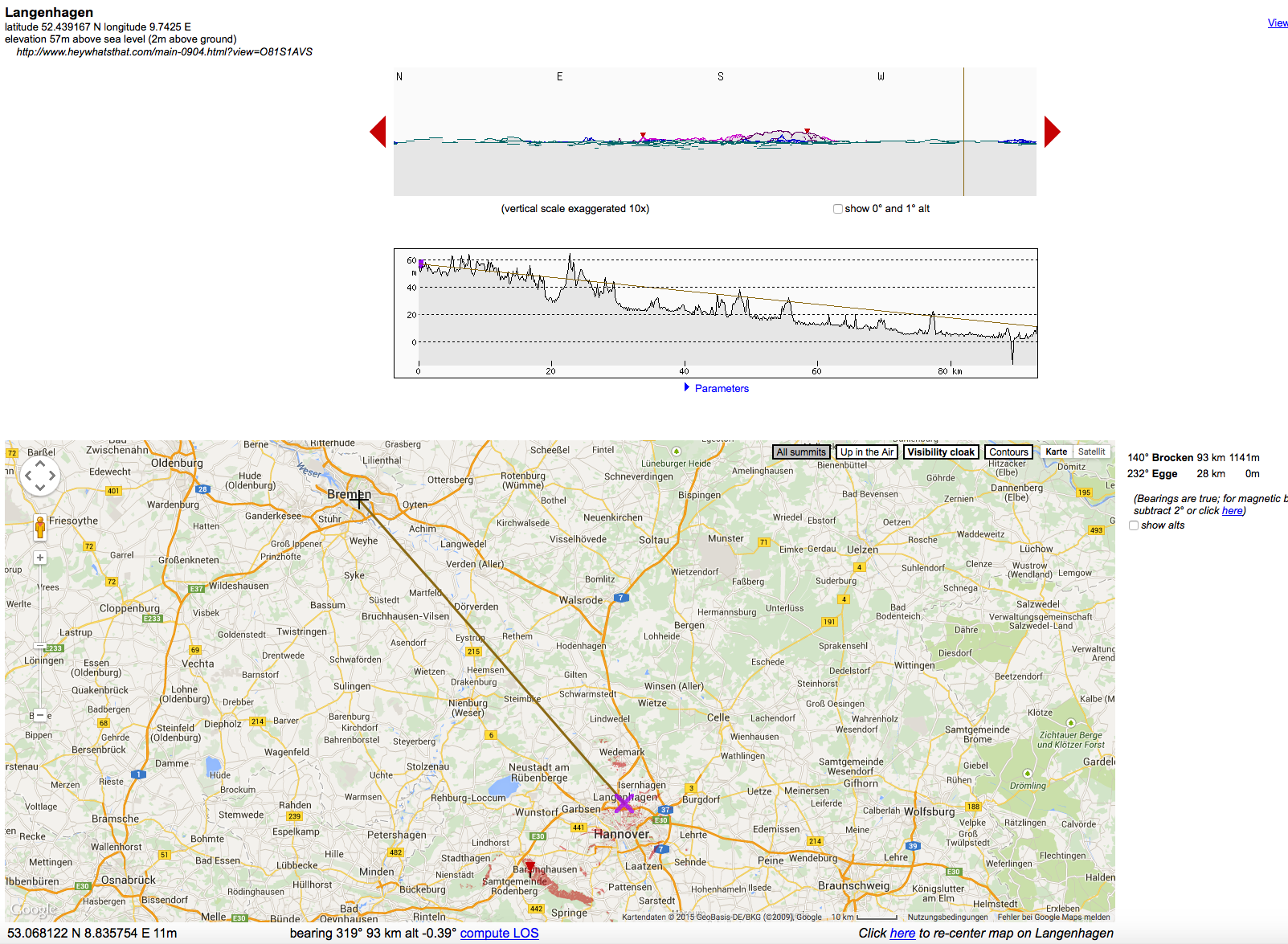 „Raspberry Pi: Höhenunterschiede mit heywhatsthat.com visualisieren“ weiterlesen
„Raspberry Pi: Höhenunterschiede mit heywhatsthat.com visualisieren“ weiterlesen
Die neue Version von Dump1090-mutability ist in der Version 1.13 veröffentlicht worden.
Was es neues gibt, steht hier. Läuft auf dem rPi mit ca. 30% CPU Last, wie man mit htop sehen kann:

Sieht doch cool aus, oder?
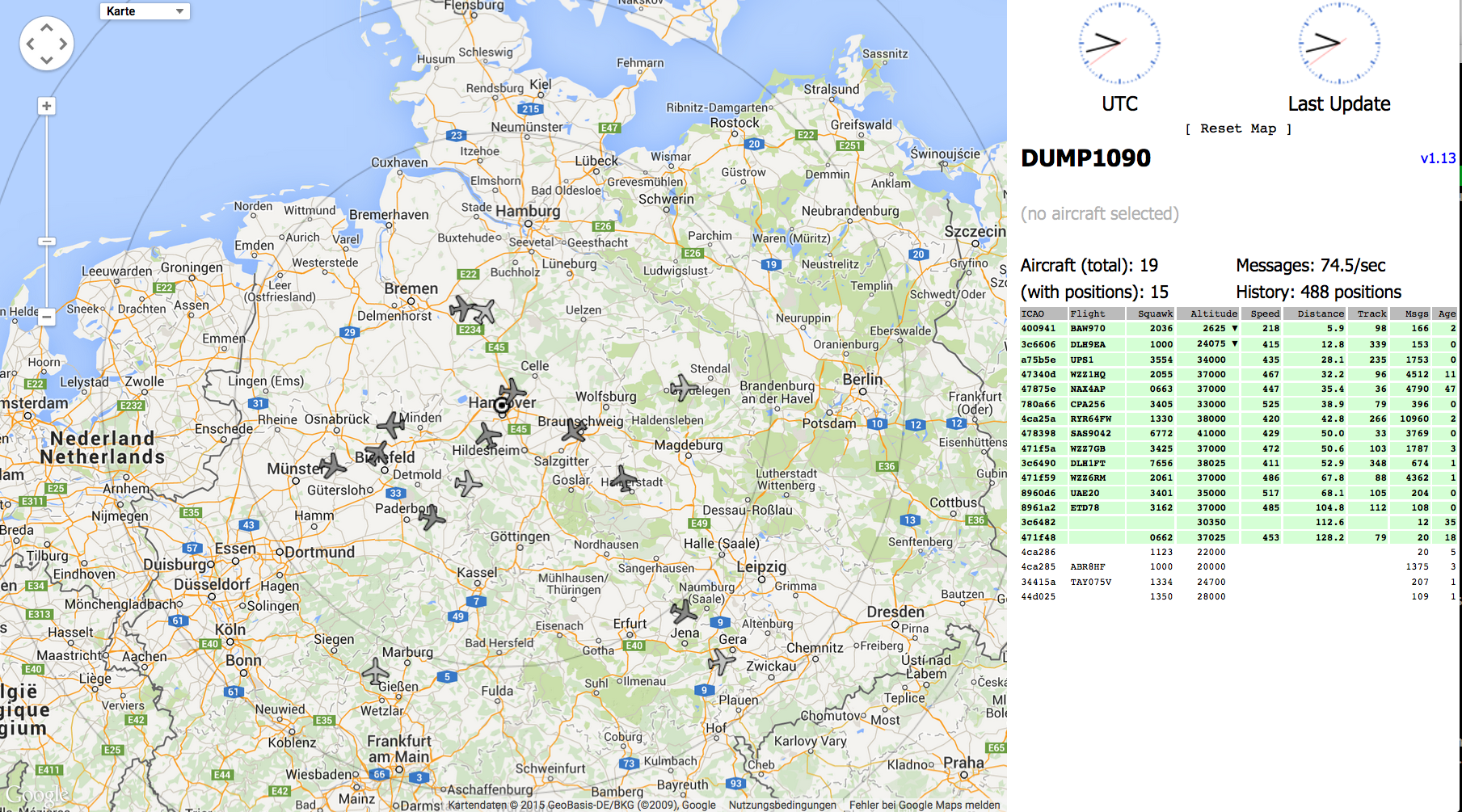
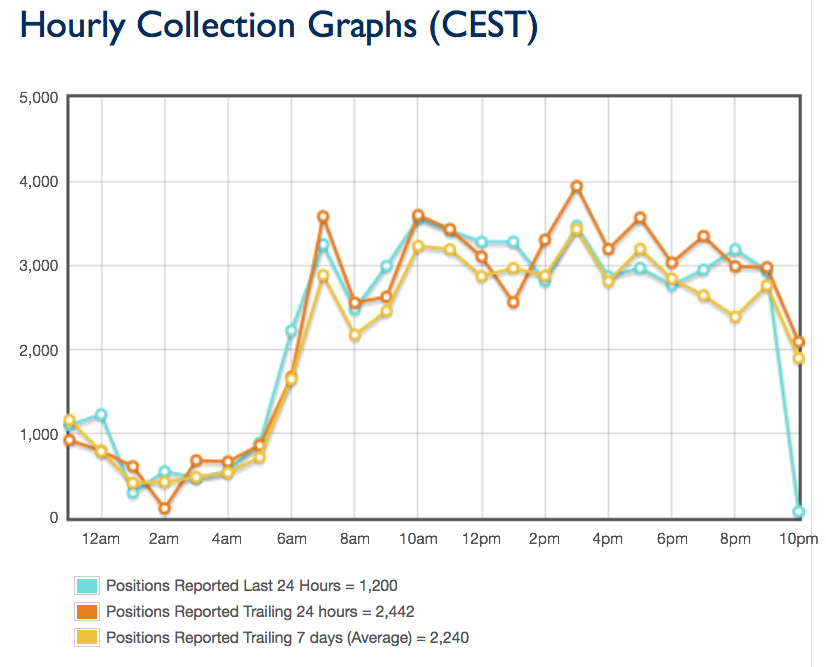
Hier mal eine Auswertung der letzten Tage aus EDDV:
Es gibt seit ein paar Tagen wieder eine neue Version. Folgende Dinge sind neu, wie Oliver Jowett schreibt, Zitat:“
“
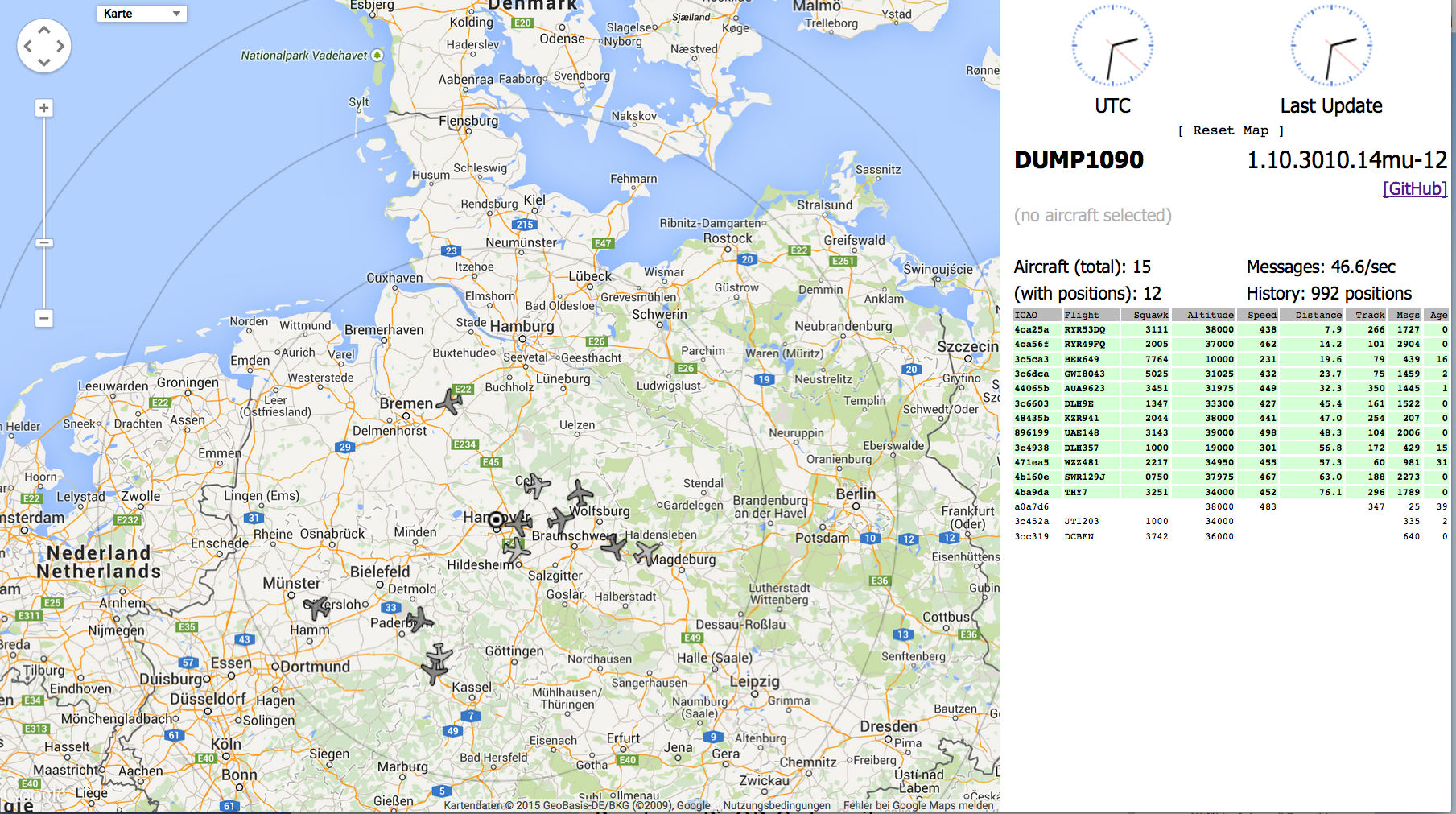
Habe sie nun auch erfolgreich installiert, und es läuft auf dem rPi.
Es geht ganz schnell, das Update:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 |
# System aktualisieren sudo update sudo upgrade # Version downloaden wget https://github.com/mutability/dump1090/releases/download/v1.10.3010.14mu-12/dump1090-mutability_1.10.3010.14mu-12_armhf.deb # Optional, den laufenden Server stopen sudo /etc/init.d/dump1090-mutability stop # Version installieren sudo dpkg -i dump1090-mutability_1.10.3010.14mu-12_armhf.deb # Checken ob der Server läuft sudo /etc/init.d/dump1090-mutability status # Ausgabe: [ ok ] dump1090-mutability is running. # Archive kann gelöscht werden rm dump1090-mutability_1.10.3010.14mu-12_armhf.deb |
Das Ergebnis aus Langenhagen:
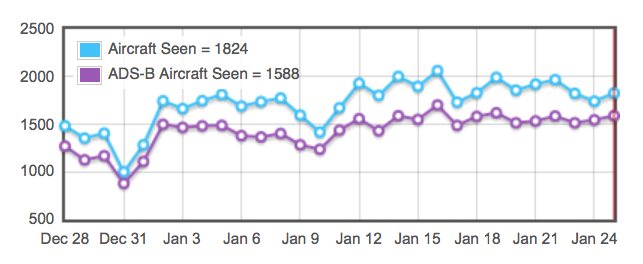
Habe gerade eine fix für TWFlug hochgeladen, der auch eine neue Funktion hat.
Es kann jetzt in Fhem die Summe aller Flugzeuge pro Tag angezeigt werden. Wird ein Flugzeug zwei oder mehrmals am Tag empfangen, wird es nur einmal in der Summe pro Tag berücksichtigt.
Es wird einmal am Tag kurz vor Mitternacht ein Eintrag in folgender Form geschrieben:
|
1 |
2015-01-05_23:59:41 flugdaten summe-pro-tag: 1296 |
Fix in Time Funktion, jetzt mit neuer 1.8 Time Api, LocalDateTime …
7700 Alarm Ausgabe in Konsole
In Fhem kann dann diese Grafik ausgegeben werden:

Hier der nötige Eintrag in der twflug.cfg Datei:
|
1 2 3 |
# die Grafik mit der Logdatei verbinden für die Anzahl Flugzeuge pro Tag define FlugdatenProTag_SVG SVG FileLog_Flugdaten:myFlugProTag:CURRENT attr FlugdatenProTag_SVG room Flugdaten |
Die myFlugProTag.gplot Datei:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 |
/* myFlugProTag.gplot Version 1.0 vom 06.01.2015 Dieses GNU-Plot Script zeigt die Flugdaten von den empfangenen Transpondern pro Tag an. Copyright (C) 2015 Thomas Wenzlaff http://www.wenzlaff.de This program is free software: you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation, either version 3 of the License, or (at your option) any later version. This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details. You should have received a copy of the GNU General Public License along with this program. If not, see {http://www.gnu.org/licenses/}. */ # Die Logdatei sieht wie folgt aus: # 2015-01-05_23:54:43 flugdaten anzahl: 4 # 2015-01-05_23:59:41 flugdaten summe-pro-tag: 1296 set terminal png transparent size <SIZE> crop set output '<OUT>.png' set xdata time set timefmt "%Y-%m-%d_%H:%M:%S" set xlabel " " set title 'Summe aller empfangene Flugzeuge pro Tag' set ytics set y2tics set grid ytics y2tics set ylabel "Anzahl Flugzeuge" set y2label "Anzahl Flugzeuge" #FileLog 4:summe-pro-tag\x3a:0: plot "<IN>" using 1:2 axes x1y2 title 'Summe aller Flugzeuge pro Tag' ls l2fill lw 2 with lines |
Welche Funktionen brauch ihr noch?
Wie hier beschrieben, gibt es einen neuen fork von DUMP1090. Nun ist wieder eine neue Version erschienen (1.10.3010.14mu-11).
Was ist neu?
-Es kann jetzt ein maximaler Bereich angegeben werden mit Parameter –max-range parameter
-Anzeige der Nachrichten Zeit
-Fix bei der UTC Uhr anzeige
-Fix im Info Panel
-Farbe des Flugeuges grau wenn es nicht mehr gesehen wird
-Fix beim beenden über SIGINT
-div. Fix..
Wie kann das update installiert werden?
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 |
# System aktualisieren sudo update sudo upgrade # Version downloaden wget https://github.com/mutability/dump1090/releases/download/v1.10.3010.14mu-11/dump1090-mutability_1.10.3010.14mu-11_armhf.deb # Laufenden Server stopen sudo /etc/init.d/dump1090-mutability stop # Version installieren sudo dpkg -i dump1090-mutability_1.10.3010.14mu-11_armhf.deb # Es erscheint eine Frage nach dem maximalen Bereich in nautische Meilen Eingab z.B. 200 # Checken ob der Server läuft sudo /etc/init.d/dump1090-mutability status # Ausgabe: [ ok ] dump1090-mutability is running. # Archive kann gelöscht werden rm dump1090-mutability_1.10.3010.14mu-11_armhf.deb |
Dann aufrufen der Seite im Browser mit http://rpi-adresse:port
Der DUMP1090 Server läuft bei mir schon lange auf einem eigenen Raspberry Pi B+ ganz gut. Es gibt nun einen neuen fork von Oliver Jowett (thanks), der einige Neuerungen bzw. Erweiterungen hat. Der dump1090-mutability.
Der mutability fork braucht nicht als root laufen und enthält die FlightAware (faupt1090) Verbindung. Auch läßt er sich besser konfigurieren auch mit externen Server. Es gibt auch eine schönere GUI, mit Kreisen rund um den Standort und bessere Daten. So werden jetzt alle Flugzeuge in Summe angezeigt und auch mit Postitionsdaten. Also einige Gründe, mal umzuschwenken.
Hier mal ein Foto um Geschmack zu machen mit der Summe der Flugzeuge:
Und hier ein Foto, wenn ein Flugzeug selektiert ist mit Details:
 „Raspberry Pi: Wie kann ein neuer Mode S Decoder für RTLSDR Devices (DUMP1090 fork) dump1090-mutability installiert werden?“ weiterlesen
„Raspberry Pi: Wie kann ein neuer Mode S Decoder für RTLSDR Devices (DUMP1090 fork) dump1090-mutability installiert werden?“ weiterlesen
Heute ist die neue Version PiAware 1.19.-3 erschienen.
Was gibt es neu:
Wir wird die neue Version nun installiert bzw. upgegradet?
Zuerste den (optional) den laufenden piaware Prozess stoppen mit:
|
1 |
sudo /etc/init.d/piaware stop |

Dann die aktuelle Version downloaden mit:
|
1 |
wget http://flightaware.com/adsb/piaware/files/piaware_1.19-3_armhf.deb |
Den update bzw. die Neuinstallation ausführen mit:
|
1 |
sudo dpkg -i piaware_1.19-3_armhf.deb |

Optional bei Neuinstallation:
|
1 |
sudo apt-get install -fy |
Nun den Server neu starten bzw. restarten mit:
|
1 |
sudo /etc/init.d/piaware restart |
Woran kann man nun erkennen das alles wieder läuft? Auf der User-Seite ist nun die folgende Warnung entfernt:

Und nach ein paar Minuten gibt es die Info:

Und natürliche werden auch die Fluginformationen aktualisiert, ok 723 Flugzeuge für den letzten Tag im Jahr ist nicht viel aber es sind ja auch noch ein paar Stunden bis 2015:

Es kann aber auch die Version angezeigt werden mit dem neuen Feature:
|
1 |
piaware -v |
Ausgabe wenn das update geklappt hat: 1.19-3
Gut Flug …
Habe soeben die 1. Version von dem DUMP1090 Client TWFlug kostenlos 
veröffentlicht.
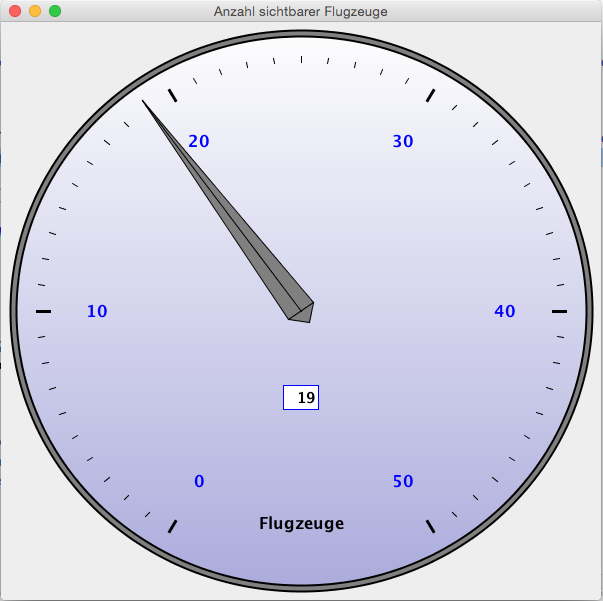
TWFlug liest die Daten von einem DUMP1090 Server und zeigt sie (optional) in einem Tacho an oder/und schreibt die Daten in eine Logdatei für die Auswertung mit z.B. Fhem. Es kann die Logdatei auch per sFTP an einen entfernten Rechner kopieren.
Das TWFlug Programm ist ein Java Programm und läuft somit auf allen Betriebssystem. Es können mit Fhem dann solche schönen Grafiken in Echtzeit angezeigt werden:
Installation:
Download der twflug-0.1.0.zip.
Dann das Archive auspacken.
Für das Starten gibt es zwei Möglichkeiten mit oder ohne GUI.
Ohne GUI mit Eingabe in der Konsole in dem TWFlug Verzeichnis mit:
|
1 |
java -jar twflug.jar -n --ip IP-VOM-DUMP1090-Server |
also z.B. java -jar twflug.jar -n --ip 192.198.1.2
oder mit GUI
|
1 |
java -jar twflug.jar --ip IP-VOM-DUMP1090-Server |
also z.B. java -jar twflug.jar --ip 192.198.1.2
Dann startet nach einigen Sekunden, die folgenden Anzeige von TWFlug:
Weiter Infos zu den Parametern erhält man durch Eingabe von
|
1 |
java -jar twflug.jar --help |
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 |
[main] DEBUG de.wenzlaff.twflug.TWFlug - Starte TWFlug ... usage: TWFlug -c,--copy-time <arg> copy time in Minuten (default: 60 Minuten) -d,--debug print debugging information (default: false) -dd,--ziel-datei <ziel-datei> destination file name (default: /home/pi/fhem/log/flugdaten-YYYY-MM.log) -dip,--ziel-ip <arg> ip adress for copy destination -dpsw,--ziel-passwort <arg> passwort from destination User -duser,--ziel-user <arg> destination User (default: pi -h,--help print help and exit -height,--window-height <arg> set window hight (default: 600) -i,--ip ip adress from DUMP1090 -k,--copy copy output file to destination (default: false) -max,--max-count <arg> set max count value (default: 50) -min,--min-count <arg> set min count value (default: 0) -n,--no-gui display no GUI. Only logfile output (default: false) -o,--outputfile <outputfile> use given file for DUMP output (default: flugdaten-YYYY-MM.log) -p,--port <arg> port from DUMP1090 (default: 30003) -r,--refresh-time <arg> refresh time in ms (default: 300000 ms = 5 Minuten) -v,--version print the version information and exit -width,--window-width <arg> set window with (default: 600) |
Weitere Anregungen, Bugs, Fix, Likes, Lob und Dank gerne als Kommentar hier auf der Seite.
Viel Spaß beim Planecounting.
Das bekannte Windows Programm PlanePlotter sendet die Flugdaten von Transpondern an PlanePlotter. Wie können diese Daten aber mit einem Raspberry Pi und ohne Windows an den PlanePlotter Server versendet werden.
Zuerst muss auf der PlanePlotter Seite eine Registrierung erfolgen. Folgende Angaben sind nötig:
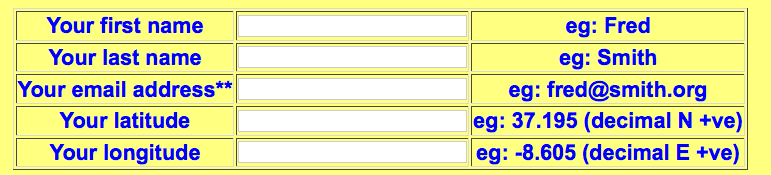
An die dort angegebenen E-Mail Adresse wird dann nach ein paar Minuten eine C- Header Datei mit Namen: coaa.h versendet.
Diese coaa.h ist wie folgt aufgebaut:
|
1 2 3 4 5 |
//coaa.h configuration file for Thomas Wenzlaff 2011-11-11 11:11:11 #define USER_REGNO 123456 #define USER_AUTHCODE 1234567890 #define USER_LATITUDE 52.4388 #define USER_LONGITUDE 9.7428 |
Dies Datei dann so wie sie ist, in das Homeverzeichnis von dem DUMP1090 Programm kopieren und das ppup (=plane plotter upload) Programm welches auch in dem Verzeichnis ist neu compilieren mit:
|
1 |
make -f makeppup1090 |
wenn der compile ohne Fehler durchgelaufen ist, kann das Program mit
|
1 |
./ppup1090 |
gestartet werden (oder wenn das hochladen im Hintergrund geschehen soll mit ./ppup1090 &). Schon werden die Daten an PlanePlotter alle 60 Sekunden hochgeladen. Das ppup1090 muss nach dem start des DUMP1090 Servers erfolgen, da er ja die Daten von diesem Server erhält.
Wie kann nun aber kontrolliert werden, ob die Daten richtig an PlanePlotter gesendet werden?
Dazu den http://www.coaa.co.uk/rpiusers.php?authcode=USER_AUTHCODE link verwenden. Den USER_AUTHCODE aus der coaa.h, die man per E-Mail erhalten hat, ersetzen und den Link im Browser aufrufen.
Z.b. http://www.coaa.co.uk/rpiusers.php?authcode=1234567890
Hier mal mein Ergebnis.
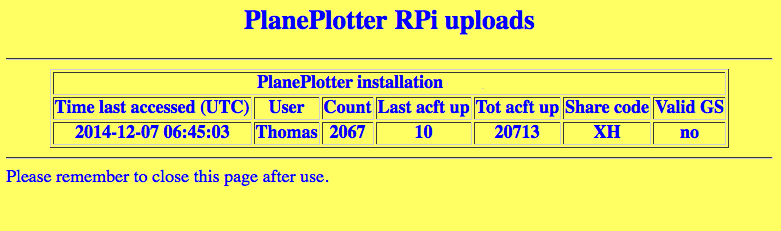
Jeder User erhält dann einen eindeutigen Share code, der bei mir XH lautet. Diesen Code findet man dann, auf der Übersichtsseite (hier mal weiß makiert):
Habt ihr noch weitere Ideen? Fehlt was?
Habe ein Java Programm für die übersichtliche Anzeige der empfangenen Flugzeuge erstellt.
Wer einen DUMP1090 Server laufen hat, kann das TWFlug Programm starten.
Es werden bisher folgende Funktione geboten:
Das TWFlug Programm läuft auf unterschiedlichen Plattformen (Win, Linux, Mac…), bisher habe ich Mac OS X Yosemite (10.10.1) getestet. Wer vor der ersten öffentlichen Version am Test teilnehmen möchte, kann mir eine E-Mail senden.
So sieht das TWFlug nach dem Start aus:
Folgendes Fhem-Format wird alle 5 Minuten geschrieben, damit in Fhem Grafiken erzeugt werden können:
|
1 2 3 4 5 6 7 8 9 10 |
2014-12-01_21:00:52 flugdaten anzahl:31 2014-12-01_21:05:52 flugdaten anzahl:31 2014-12-01_21:10:52 flugdaten anzahl:32 2014-12-03_06:11:56 flugdaten anzahl:7 2014-12-03_06:16:56 flugdaten anzahl:12 2014-12-03_06:21:56 flugdaten anzahl:10 2014-12-03_06:26:56 flugdaten anzahl:11 2014-12-03_06:31:56 flugdaten anzahl:9 2014-12-03_06:36:56 flugdaten anzahl:18 2014-12-03_06:41:56 flugdaten anzahl:20 |
Das Programmfenster läßt sich skalieren, so das es auf dem Desktop schön aussieht:
Der Quellcode liegt auf GitHub.
Vor einiger Zeit hatte ich schon mal beschrieben wie man die Flugzeugsignale mit dem Raspberry Pi empfängt und nach Flightradar24.com senden kann. Es gibt aber noch eine andere Flugseite FlightAware. Wie kann man die Flugsignale gleichzeitig auch nach FlightAware senden? Das geht mit dieser Beschreibung ganz gut. Man benötigt erst mal einen Account bei FlightAware. Der Dump1090 Server muss installiert sein und laufen. Das wurde von mir auch schon mal beschrieben.
Dann folgende Befehle im Terminal eingeben um die empfangenen Flugsignale vom DUMP1090 über faup1090 alle 5 Minuten verschlüsselt (TLS) an FlightAware zu senden:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 |
# System updaten sudo apt-get update sudo apt-get upgrade # Nötige Komponenten laden sudo apt-get install -fy # Programm downloaden wget http://uk.flightaware.com/adsb/piaware/files/piaware_1.20-1_armhf.deb # und instalieren sudo dpkg -i piaware_1.20-1_armhf.deb # Optional zwei Einstellungen setzen (siehe weiter unten) sudo piaware-config -autoUpdate 1 -manualUpdate 1 # Feed starten mit sudo piaware-config -user USERNAME -password # Passwort abfrage kommt, dann Passwort eingeben # und piaware einmal restarten sudo /etc/init.d/piaware restart # Status kann optional abgefragt werden mit sudo /etc/init.d/piaware status # oder mehr mit sudo piaware-status # Stoppen des piAware Servers mit sudo /etc/init.d/piaware stop # Starten des piAware Servers mit sudo /etc/init.d/piaware start |
Die möglichen Einstellungen können mit
|
1 |
sudo piaware-config -help |
abgefragt werden. Es werden folgende Befehle unterstützt:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 |
piaware-config : piaware-config -help|-user|-password|-start|-stop|-status|-autoUpdate 1/0|-manualUpdate 1/0 -user value specify the user name of a valid FlightAware account <> -password interactively specify the password of the FlightAware account -autoUpdate value 1 = allow FlightAware to automatically update software on my Pi, 0 = no <> -manualUpdate value 1 = allow me to trigger manual updates through FlightAware, 0 = no <> -start attempt to start the ADS-B client -stop attempt to stop the ADS-B client -restart attempt to restart the ADS-B client -status get the status of the ADS-B client -show show config file -- Forcibly stop option processing -help Print this message -? Print this message |
Schon nach ein paar Minuten werden die Flugdaten bei FlightAware sichtbar.
Der Quellcode und Beschreibung zu dem piaware Programm findet man auf Github.
Was das piaware Programm so nach dem start macht, kann in der Logdatei unter /tmp/piaware.out eingesehen werden. Hier mal ein Auszug aus der Verbindung:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 |
11/30/2014 12:14:22 **************************************************** 11/30/2014 12:14:22 piaware version 1.18 is running, process ID 12345 11/30/2014 12:14:22 your system info is: Linux xxxx 3.12.28+ #712 PREEMPT Tue Sep 16 15:49:13 BST 2014 armv6l GNU/Linux 11/30/2014 12:14:22 connecting to FlightAware eyes.flightaware.com/1200 11/30/2014 12:14:23 FlightAware server SSL certificate validated 11/30/2014 12:14:23 encrypted session established with FlightAware 11/30/2014 12:14:23 autoUpdate in adept config is enabled, allowing update 11/30/2014 12:14:23 manualUpdate in adept config is enabled, allowing update 11/30/2014 12:14:24 ADS-B data program 'dump1090' is listening on port 30005, so far so good 11/30/2014 12:14:24 i see nothing serving on port 10001, starting faup1090... 11/30/2014 12:14:24 started faup1090 (process ID 12345) 11/30/2014 12:14:27 connecting to faup1090 on port 10001... 11/30/2014 12:14:27 piaware is connected to faup1090 on port 10001 11/30/2014 12:14:27 logged in to FlightAware as user USERNAME 11/30/2014 12:14:27 piaware received a message from the ADS-B source! 11/30/2014 12:14:32 piaware has successfully sent several msgs to FlightAware! 11/30/2014 12:14:57 26 msgs recv'd from dump1090 via faup1090; 26 msgs sent to FlightAware 11/30/2014 12:15:23 server is sending alive messages; we will expect them 11/30/2014 12:19:57 309 msgs recv'd from dump1090 via faup1090 (283 in last 5m); 310 msgs sent to FlightAware 11/30/2014 12:24:57 625 msgs recv'd from dump1090 via faup1090 (316 in last 5m); 627 msgs sent to FlightAware ... |
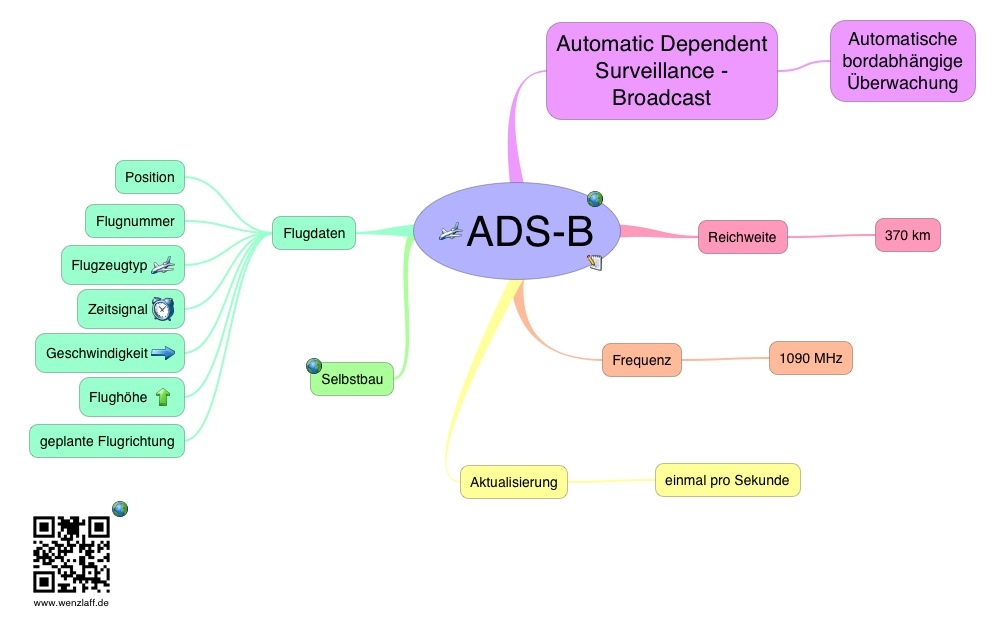
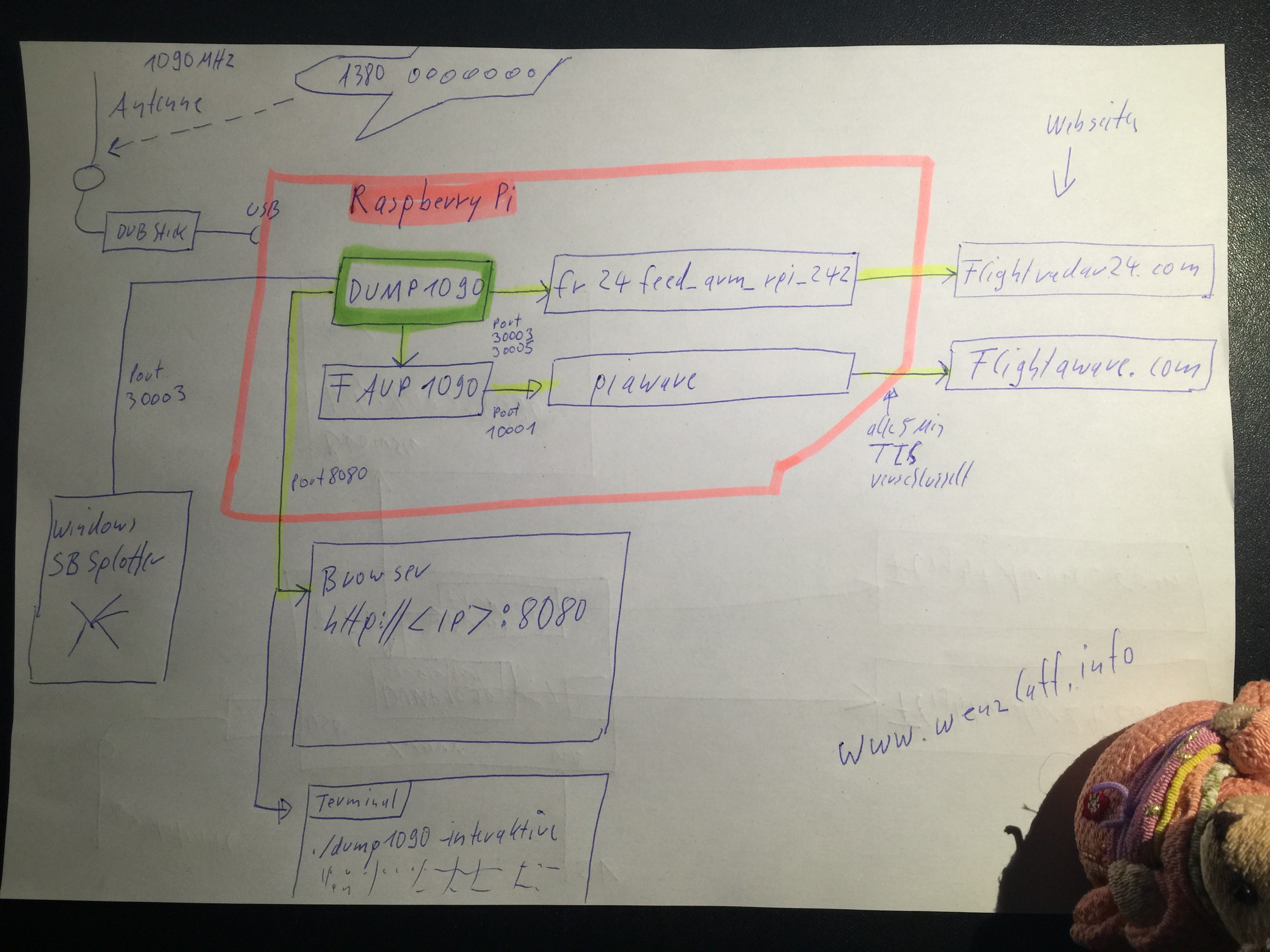
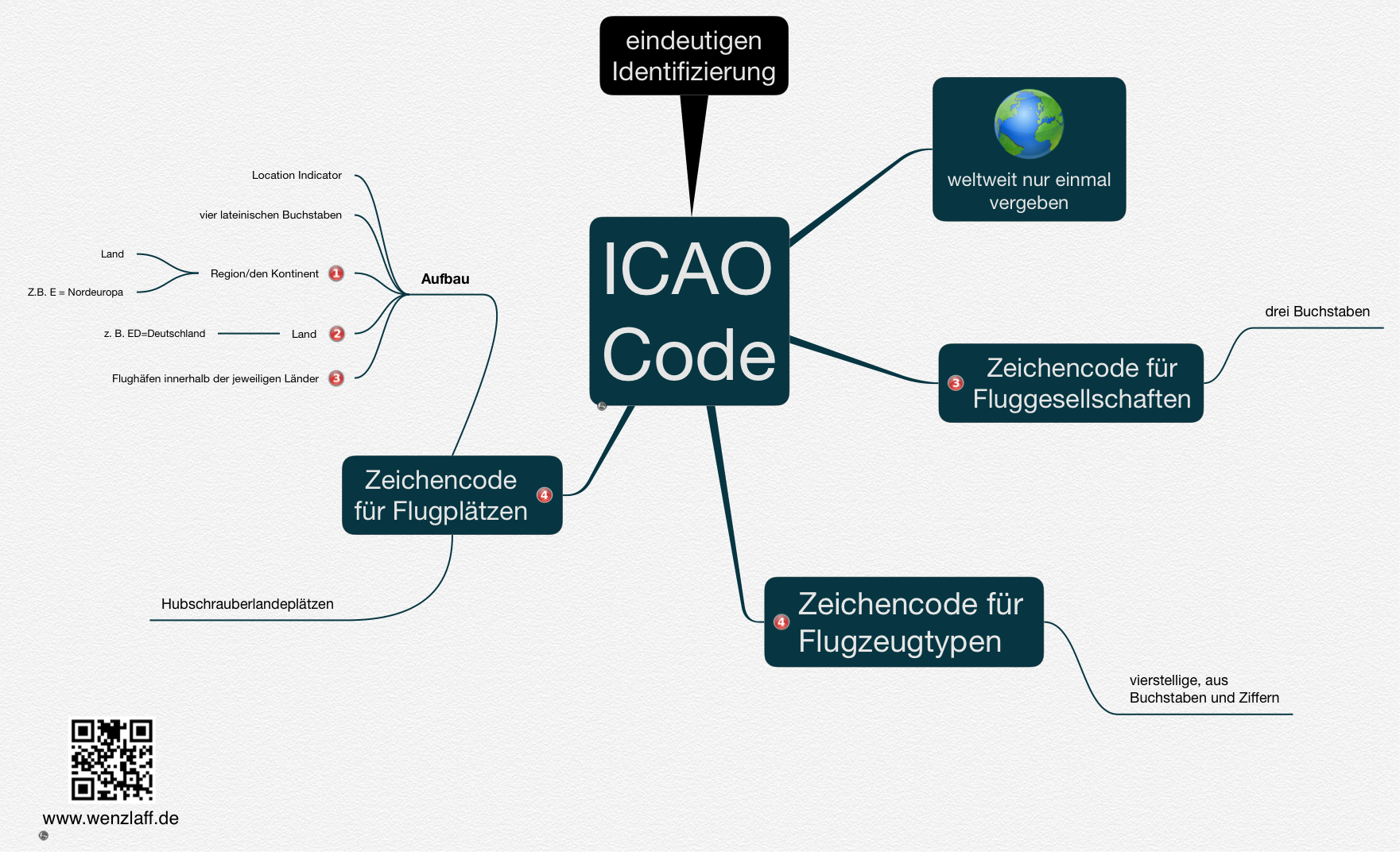
Hier die Architektur-Grafik:
Mehr Mindmaps im Archive 2012, 2013, 2014 in den Formaten PDF, MM, ITMZ, MMAP und XMIND.
Mehr Mindmaps im Archive 2012, 2013, 2014 in den Formaten PDF, MM, ITMZ, MMAP und XMIND.
Wie in diesem Post beschrieben können Flugdaten mit dem Raspberry Pi empfangen werden. Diese Daten können auch automatisch an Flightradar24.com gesendet werden damit auch andere davon etwas haben ;-). Die Anmeldung wird hier für Windows User beschrieben. Es geht aber auch viel einfacher, nur mit dem Raspberry Pi unter Debian. Das beschreibe ich hier mal.
Das Programm von Flightradar24 kann (von hier) manuell geladen und installiert werden.
Es geht aber einfach so:
# download
wget https://dl.dropboxusercontent.com/u/66906/fr24feed_arm-rpi_242.tgz
# entpacken
tar xf fr24feed_arm-rpi_242.tgz
# Progamm ausführbar machen
chmod +x fr24feed_arm-rpi_242
# Archive löschen
rm fr24feed_arm-rpi_242.tgz
Die Geoposition vom Standort suchen über Google Maps. Z.B. von Langenhagen:
Latitude: 52.4388
Longitude: 9.7428
Starten der einmaligen Anmeldung bei Flightradar24 mit:
|
1 |
./fr24feed_arm-rpi_242 --signup |
Der folgende Dialog muss einmal erfolgreich durchlaufen werden und die abgefragen Parameter eingegeben werden:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 |
[i]FR24Feed v242 - built on Aug 15 2014/08:32:38 Welcome to the FR24 Feeder sign up wizard! Before you continue please make sure that: 1 - You have a working receiver/decoder providing Basestation compatible stream 2 - You know the network address of the data feed (localhost:30003 by default) 3 - You know your receivers location up to 1 decimal point 4 - You have a working email address that will be used to contact you To terminate - press Ctrl+C at any point Step 1/5 - Enter Latitude (DD.DDDD) $:52.4610 Step 2/5 - Enter Longitude (DD.DDDD) $:9.6850 Step 3/5 - Enter your email address (username@domain.tld) $:email@gültige-adresse.de Step 4/5 - Enter your the hostname of the data feed (leave empty for localhost) $:piplus Step 5/5 - Enter your the port number of the data feed (leave empty for 30003) $: Validating form data...OK The closest airport found is ICAO:EDDV IATA:HAJ near Hannover. Latitude: 52.461048 Longitude: 9.685078 Country: Germany Flightradar24 may, if needed, use your email address to contact you regarding your data feed. Would you like to continue using these settings? (yes/no)$:yes Taking data sample, minimum 3 AC required including at least 2 ADS-B: [b]connecting to piplus:30003 [b]connected [i]00:00 - Connected to the data feed [b]working [i]Data feed time difference OK abs(18:52:55.869 - 18:52:55.879)=0 [b]00:05 - 4 AC in range [b]00:10 - 5 AC in range [b]00:15 - 6 AC in range [b]00:20 - 5 AC in range [b]00:25 - 7 AC in range [b]00:30 - 7 AC in range [b]00:35 - 8 AC in range [i]Removed 0 of 9 AC [b]disconnected Sending data sample to the server, completing registration...OK Account registered successfully! Your sharing key is: xxxxxxxxx Your radar code is: x-xxxxx |
Nach der Registrierung wird auch eine E-Mail mit den Key gesendet, dann wie folgt starten:
|
1 |
/dump1090 --fix --net --net-sbs-port 30003 --net-ro-port 31001 --quiet > /dev/null |
Ergebnis:
|
1 2 3 4 5 6 7 |
Found 1 device(s): 0: Generic, RTL2832U, SN: 777711111777777 (currently selected) Found Rafael Micro R820T tuner Max available gain is: 49.60 Setting gain to: 49.60 Exact sample rate is: 2000000.052982 Hz Gain reported by device: 49.60 |
Dann in einer neuen Konsole den senden Feed starten mit:
|
1 |
./fr24feed_arm-rpi_242 --fr24key=KEY |
Ergebnis der Daten die gesendet werden (wenn –quiet > /dev/null vom obigen Aufruf entfernt werden):
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 |
[i]Downloading configuration...OK [i]Parsing configuration...OK [c]Interval: 5s [c]Latitude: 52.4610 [c]Longitude: 9.6850 [c]GND: YES [c]NonADSB: YES [i]Source defined as Basestation [n]defined 1 server [n]EDV@xx.xxx.xxx.xxx:8099/UDP [n]connecting [i][stats]Stats thread started [b]connecting to piplus:30003 [b]connected [b]working [i]Data feed time difference OK abs(19:01:25.531 - 19:01:25.500)=0 [n]connected [n]switching to UDP [n]working [i]sent 2 planes in 1 packets [i]sent 6 planes in 1 packets [i]sent 4 planes in 1 packets [i]sent 5 planes in 1 packets [i]sent 4 planes in 1 packets [i]sent 4 planes in 1 packets [i]sent 4 planes in 1 packets [i]sent 4 planes in 1 packets [i]sent 5 planes in 1 packets [i]sent 4 planes in 1 packets [i]sent 4 planes in 1 packets [i]sent 4 planes in 1 packets [i]sent 4 planes in 1 packets [n]pinging the server [i]sent 5 planes in 1 packets |
Wenn es Probleme gibt, kann mit
|
1 |
netstat -naep |
geschaut werden, ob die Programme dump1090 und fr24feed_arm-r auf verbunden stehen.
Wenn die Daten erfolgreich an Flightradar24 gesendet werden, kann man mit der gleichen E-Mail Adresse wie oben bei der Anmeldung einen kostenlosen Premium Account auf der Webseite anlegen. Die Anmeldung ist da etwas schwer auffindbar. Der bleibt aber nur 7 Tage länger, als die letzte Übertragung gültig ist aktiv.

Mehr Mindmaps im Archive 2012, 2013, 2014 in den Formaten PDF, MM, ITMZ, MMAP und XMIND.
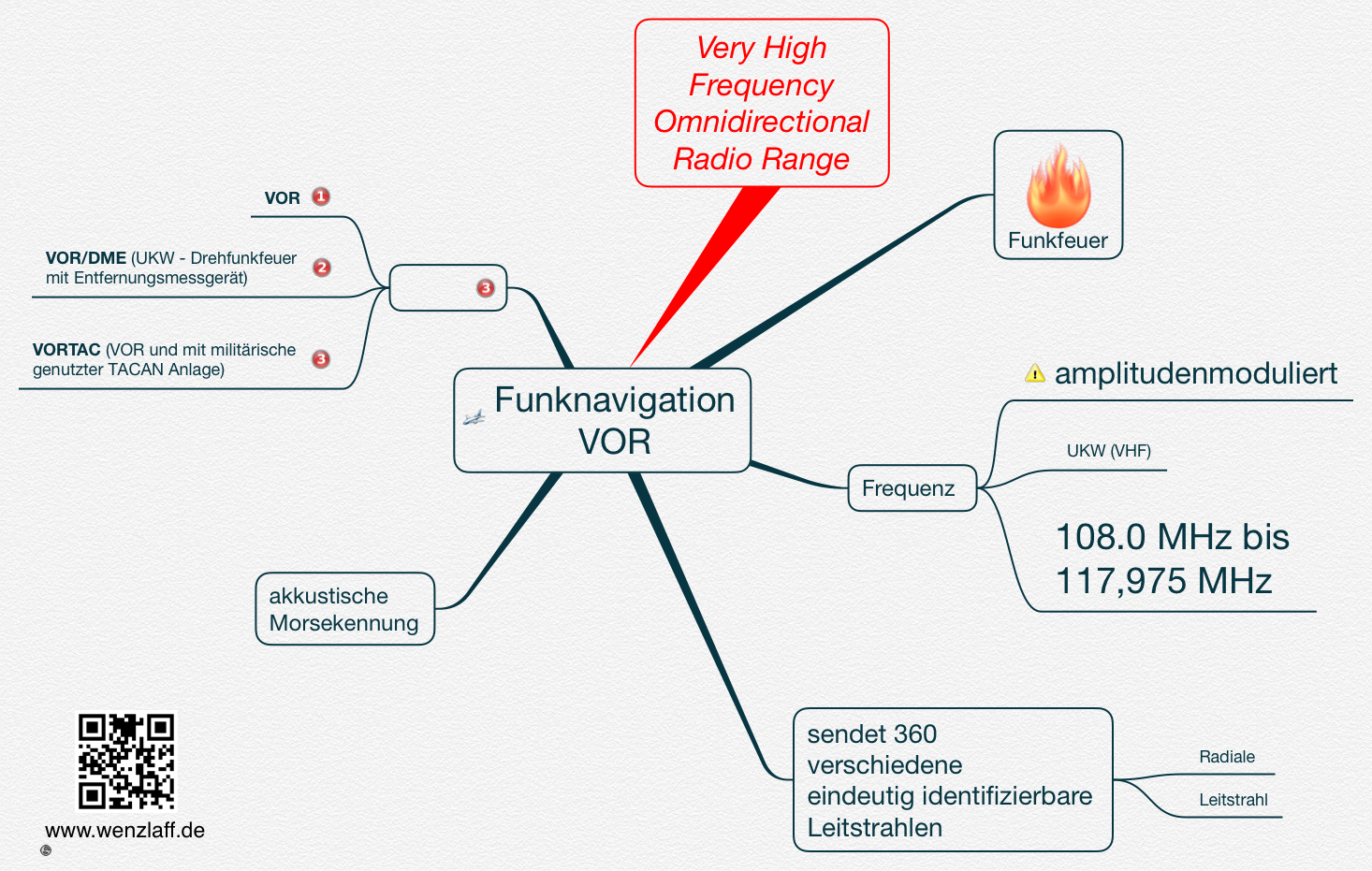
Mehr Mindmaps im Archive 2012, 2013, 2014 in den Formaten PDF, MM, ITMZ, MMAP und XMIND.