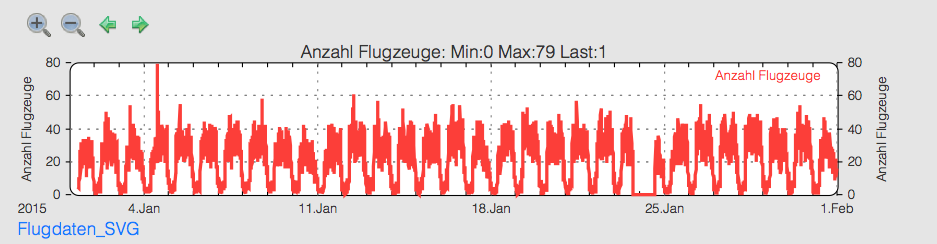
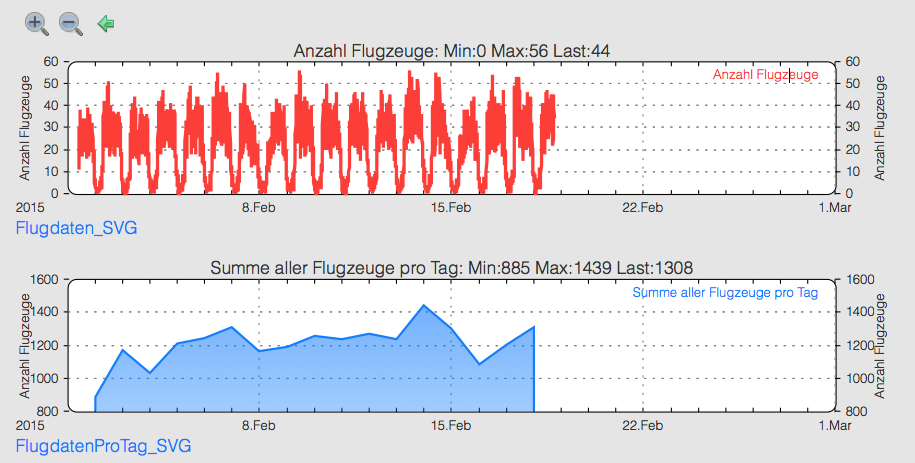
Der Streik am 30.1.2015 am Flughafen in Hannover hat keine relevanten Auswirkungen auf den Flugverkehr, der von mir mit einem Raspberry Pi und DUMP1090 via Fhem erfasst wird. Das zeigen diese Grafiken:
Raspberry Pi: Wie kann eine automatische Scriptausführung nach einem reboot eingerichtet werden?
Wie kann ein Script automatisch nach dem reboot starten? Da gibt es mehrere Möglichkeiten. Hier die via crontab und @reboot.
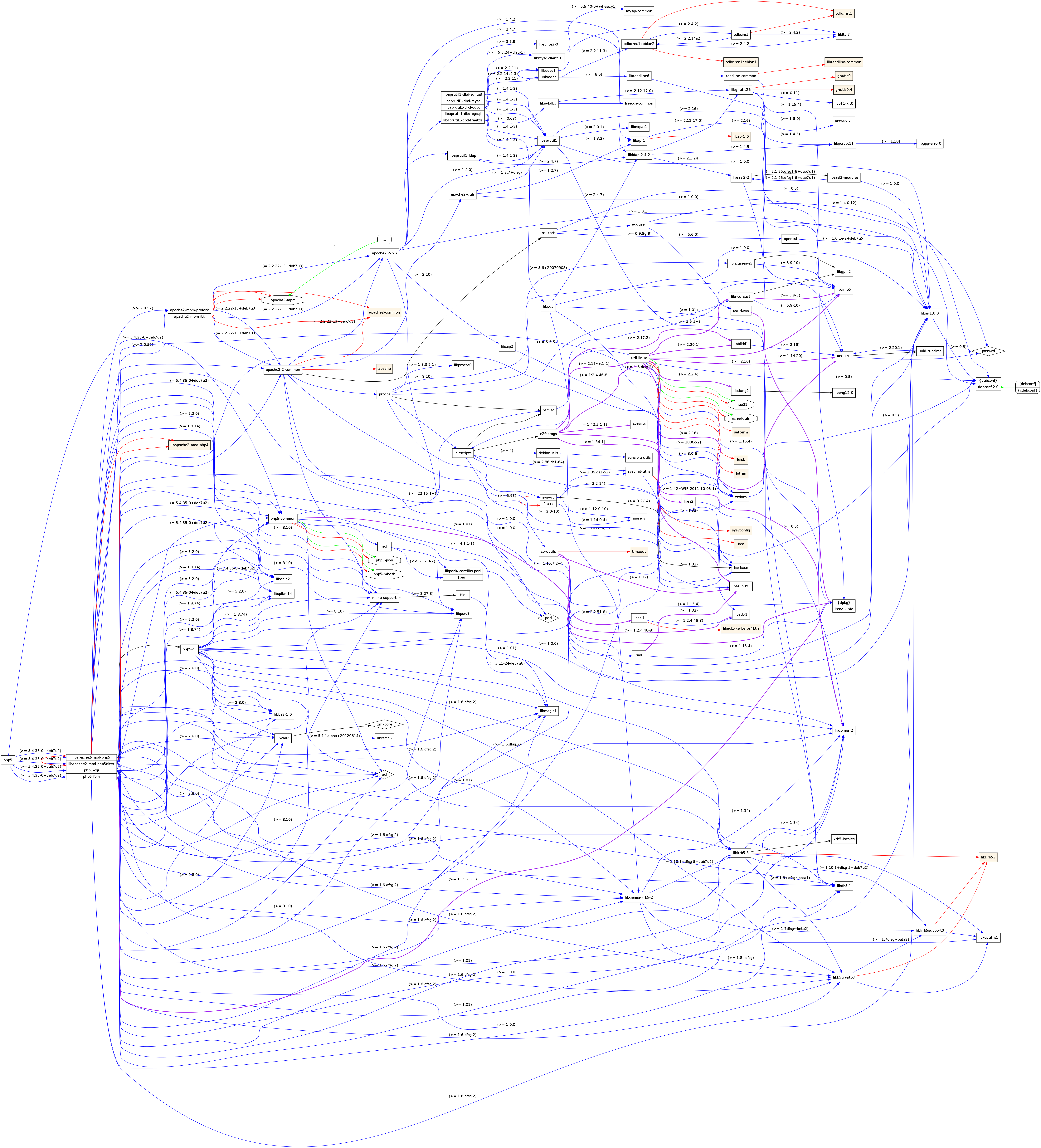
Cron ist in den meisten Installationen schon enthalten. In Kali und Debian Linux mit diesen Abhängigkeiten, wie meine Mindmap zeigt: „Raspberry Pi: Wie kann eine automatische Scriptausführung nach einem reboot eingerichtet werden?“ weiterlesen
Raspberry Pi: Wie kann die Bandbreite pro Prozess mit NetHogs angezeigt werden?
Mit dem Kommandozeilenwerkzeug nethogs, das die Bandbreitennutzung nach Prozessen und Sub-Netzen gruppieren kann, bekommt man schnell einen Überblick.
Es listet die PID, den Prozessnamen, Send Bytes, Received Bytes und den ausführenden Benutzer auf.
Die Installation ist auf dem Raspberry Pi mit:
|
1 |
apt-get nethogs |
schnell erledigt. Das Programm hat nur die folgenden Abhängigkeiten:
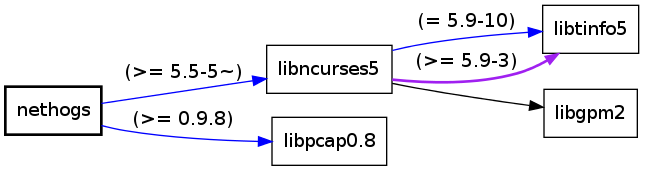
„Raspberry Pi: Wie kann die Bandbreite pro Prozess mit NetHogs angezeigt werden?“ weiterlesen
Raspberry Pi: Was ist bei Kali Linux anders als im Debian?
Wer den Raspberry Pi bisher unter Debian laufen hat, wundert sich evl. über einige Unterschiede zu Kali Linux. Welche fallen zuerst auf?
Es gibt default kein raspi-config. Der Speicher der SD-Karte kann aber mit raspi-config sehr einfach expandiert werden. Deshalb ausnahmsweise ein paar Packages, die nicht von Kali stammen, wie folgt installieren mit dem root User:
|
1 2 3 4 5 6 7 8 9 |
apt-get update apt-get upgrade wget http://archive.raspberrypi.org/debian/pool/main/r/raspi-config/raspi-config_20150706_all.deb # lua5.1 da lua5.2 nicht läuft wget http://http.us.debian.org/debian/pool/main/l/lua5.1/lua5.1_5.1.5-7.1_armel.deb wget http://http.us.debian.org/debian/pool/main/t/triggerhappy/triggerhappy_0.3.4-2_armel.deb dpkg -i triggerhappy_0.3.4-2_armel.deb dpkg -i lua5.1_5.1.5-7.1_armel.deb dpkg -i raspi-config_20150706_all.deb |
Dann gibt es unter Kali kein /boot Verzeichnis mit den Boot Dateien. Das /boot Verzeichnis ist dort leer. Das /boot Verzeichnis liegt auf einer anderen Partition und zwar auf mmcblk0p1. Deshalb ein Verzeichnis z.B. /boot-bereich anlegen und mounten. Dann können diese Dateien bearbeitet werden.
Wenn die Dateien bearbeitet wurden, einfach das Verzeichnis wieder umounten.
|
1 2 3 4 |
mkdir /boot-bereich mount /dev/mmcblk0p1 /boot-bereich/ nano /boot-bereich/config.txt umount /boot-bereich |
Welche Unterschiede fallen Euch auf? Gern als Kommentar.
Raspberry Pi: Wie können OpenHab Addons installiert werden?
Wie können Addons für OpenHab installiert werden?
Dazu erweitern wir erst einmal die Addons mit den Bindings. Die werden später benötigt.
|
1 2 3 4 5 |
cd OpenHab/addons wget https://openhab.ci.cloudbees.com/job/openHAB/lastSuccessfulBuild/artifact/distribution/target/distribution-1.6.0-SNAPSHOT-addons.zip unzip distribution-1.6.0-SNAPSHOT-addons.zip # Optional: Löschen des zip rm distribution-1.6.0-SNAPSHOT-addons.zip |
Jessie: RPI-Monitor für den Raspberry Pi installieren
Dieser Entwurf aus dem letzten Jahr, wollte ich nun auch noch veröffentlichen. Wer einen RPI-Monitor braucht:
Wie hier gut beschrieben die Version 2.6.1 installieren, da die aktuelle Version 2.9.1 unter jessie nicht läuft.
Aber auch auf der RPI-Monitor Seite wird die Installation ausführlich beschrieben.
|
1 2 3 4 5 |
sudo apt-get update && sudo apt-get upgrade sudo apt-get install dpkg-dev librrds-perl libhttp-daemon-perl libjson-perl libipc-sharelite-perl libfile-which-perl wget --no-check-certificate https://github.com/XavierBerger/RPi-Monitor-deb/raw/master/packages/rpimonitor_2.6-1_all.deb sudo dpkg -i rpimonitor_2.6-1_all.deb rm rpimonitor_2.6-1_all.deb |
Nun im Browser http://IP:8888/ aufrufen.
„Jessie: RPI-Monitor für den Raspberry Pi installieren“ weiterlesen
Raspberry Pi Wardrive: Kismet compilieren und WLANs auf Google anzeigen
Da es auf Debian wheezy noch nicht das aktuelle Kismet Package gibt, hier die Anleitung wie es compiliert und installiert werden kann.
|
1 2 3 4 5 6 7 8 9 10 |
# System aktualisieren sudo apt-get update sudo apt-get upgrade # nötige Programme laden sudo apt-get install screen gpsd libncurses5-dev libpcap-dev tcpdump libnl-dev wget http://www.kismetwireless.net/code/kismet-2013-03-R1b.tar.gz tar xfvz kismet-2013-03-R1b.tar.gz cd kismet-2013-03-R1b/ ./configure sudo make install |
Wenn der GPS Empfänger über gpsd läuft und wie bei mir nicht an dem USB Port hängt, müssen in /usr/local/etc/kismet.conf noch folgende Einstellungen gemacht werden.
|
1 2 3 4 5 6 7 |
# (Optional) Verzeichnis wo die Logeinträge hingeschrieben werden, sonst start Verzeichnis logprefix=/home/pi/kismet # das WLAN Interface und den WLAN-Stick Type ncsource=wlan0:type=rt2800usb gps=true gpstype=gpsd gpshost=localhost:2947 |
Gestartet wird Kismet bei mir über ein kleines bash Script start-wardrive.sh:
|
1 2 3 4 5 6 |
#!/bin/bash cd kismet-2013-03-R1b sudo pkill wpa_cli sudo pkill ifplugd sudo pkill wpa_supplicant sudo kismet |
Für die Auswertung kann man das Python Script zum umwandeln einer NETXML Datei in das KML Format verwenden, es geht wie folgt
„Raspberry Pi Wardrive: Kismet compilieren und WLANs auf Google anzeigen“ weiterlesen
Raspberry Pi: Wardriving (Warwalking) Kismet netxml Dateien visualisieren mit Google Earth
Auswertung der netxml Daten geht auch sehr gut mit giskismet, das die netxml Dateien in eine SQLite Datenbank (default: wireless.dbl ) kopiert und auch GoogleEarth / KML Dateien für die Visualisierung via SQL erzeugen kann.
Installiert wird es auf dem Raspberry Pi mit: „Raspberry Pi: Wardriving (Warwalking) Kismet netxml Dateien visualisieren mit Google Earth“ weiterlesen
Raspberry Pi: GPS-Module GY-GPS6MV2 einrichten
Haben nun auch einen GPS-Empfänger (Datenblatt (pdf)) bekommen. Hier ein paar Highlights:
- Model: GY-GPS6MV2
- Power Supply Range: 3 V to 5 V
- Ceramic antenna
- EEPROM for saving the configuration data when powered off
- Backup battery
- LED signal indicator
- Antenna Size: 25 x 25 mm
- Module Size: 25 x 35 mm
- Default Baud Rate: 9600 bps
Klein und billig: „Raspberry Pi: GPS-Module GY-GPS6MV2 einrichten“ weiterlesen
Mindmaps ab jetzt auf kleinhirn.eu
Ab jetzt werden die Mindmaps auf der Domäne kleinhirn.eu veröffentlicht.
Für das dump1090-mutability (1.13) unter Debian für den Raspberry Pi gibt es da jetzt auch eine Mindmap.
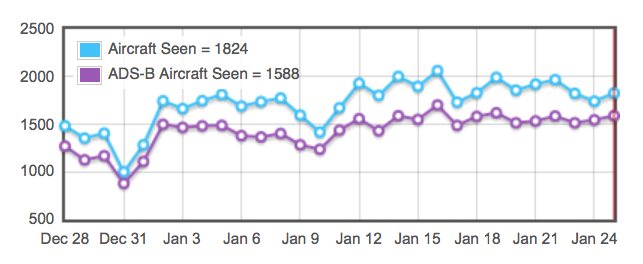
Vorgestern wurde eine neue Version von dump1090-mutability (1.13) für den Raspberry Pi veröffentlicht
Die neue Version von Dump1090-mutability ist in der Version 1.13 veröffentlicht worden.
Was es neues gibt, steht hier. Läuft auf dem rPi mit ca. 30% CPU Last, wie man mit htop sehen kann:

Sieht doch cool aus, oder?
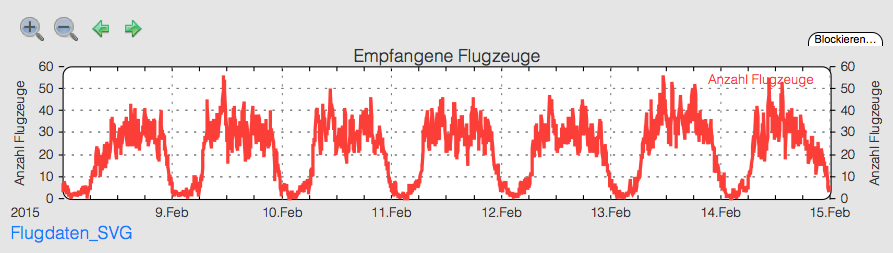
Hier mal eine Auswertung der letzten Tage aus EDDV:
Raspberry Pi: TWFlug ermöglicht nun die Summe aller Flugzeuge am Tag via Fhem
Habe gerade eine fix für TWFlug hochgeladen, der auch eine neue Funktion hat.
Es kann jetzt in Fhem die Summe aller Flugzeuge pro Tag angezeigt werden. Wird ein Flugzeug zwei oder mehrmals am Tag empfangen, wird es nur einmal in der Summe pro Tag berücksichtigt.
Es wird einmal am Tag kurz vor Mitternacht ein Eintrag in folgender Form geschrieben:
|
1 |
2015-01-05_23:59:41 flugdaten summe-pro-tag: 1296 |
Fix in Time Funktion, jetzt mit neuer 1.8 Time Api, LocalDateTime …
7700 Alarm Ausgabe in Konsole
In Fhem kann dann diese Grafik ausgegeben werden:

Hier der nötige Eintrag in der twflug.cfg Datei:
|
1 2 3 |
# die Grafik mit der Logdatei verbinden für die Anzahl Flugzeuge pro Tag define FlugdatenProTag_SVG SVG FileLog_Flugdaten:myFlugProTag:CURRENT attr FlugdatenProTag_SVG room Flugdaten |
Die myFlugProTag.gplot Datei:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 |
/* myFlugProTag.gplot Version 1.0 vom 06.01.2015 Dieses GNU-Plot Script zeigt die Flugdaten von den empfangenen Transpondern pro Tag an. Copyright (C) 2015 Thomas Wenzlaff http://www.wenzlaff.de This program is free software: you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation, either version 3 of the License, or (at your option) any later version. This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details. You should have received a copy of the GNU General Public License along with this program. If not, see {http://www.gnu.org/licenses/}. */ # Die Logdatei sieht wie folgt aus: # 2015-01-05_23:54:43 flugdaten anzahl: 4 # 2015-01-05_23:59:41 flugdaten summe-pro-tag: 1296 set terminal png transparent size <SIZE> crop set output '<OUT>.png' set xdata time set timefmt "%Y-%m-%d_%H:%M:%S" set xlabel " " set title 'Summe aller empfangene Flugzeuge pro Tag' set ytics set y2tics set grid ytics y2tics set ylabel "Anzahl Flugzeuge" set y2label "Anzahl Flugzeuge" #FileLog 4:summe-pro-tag\x3a:0: plot "<IN>" using 1:2 axes x1y2 title 'Summe aller Flugzeuge pro Tag' ls l2fill lw 2 with lines |
Welche Funktionen brauch ihr noch?
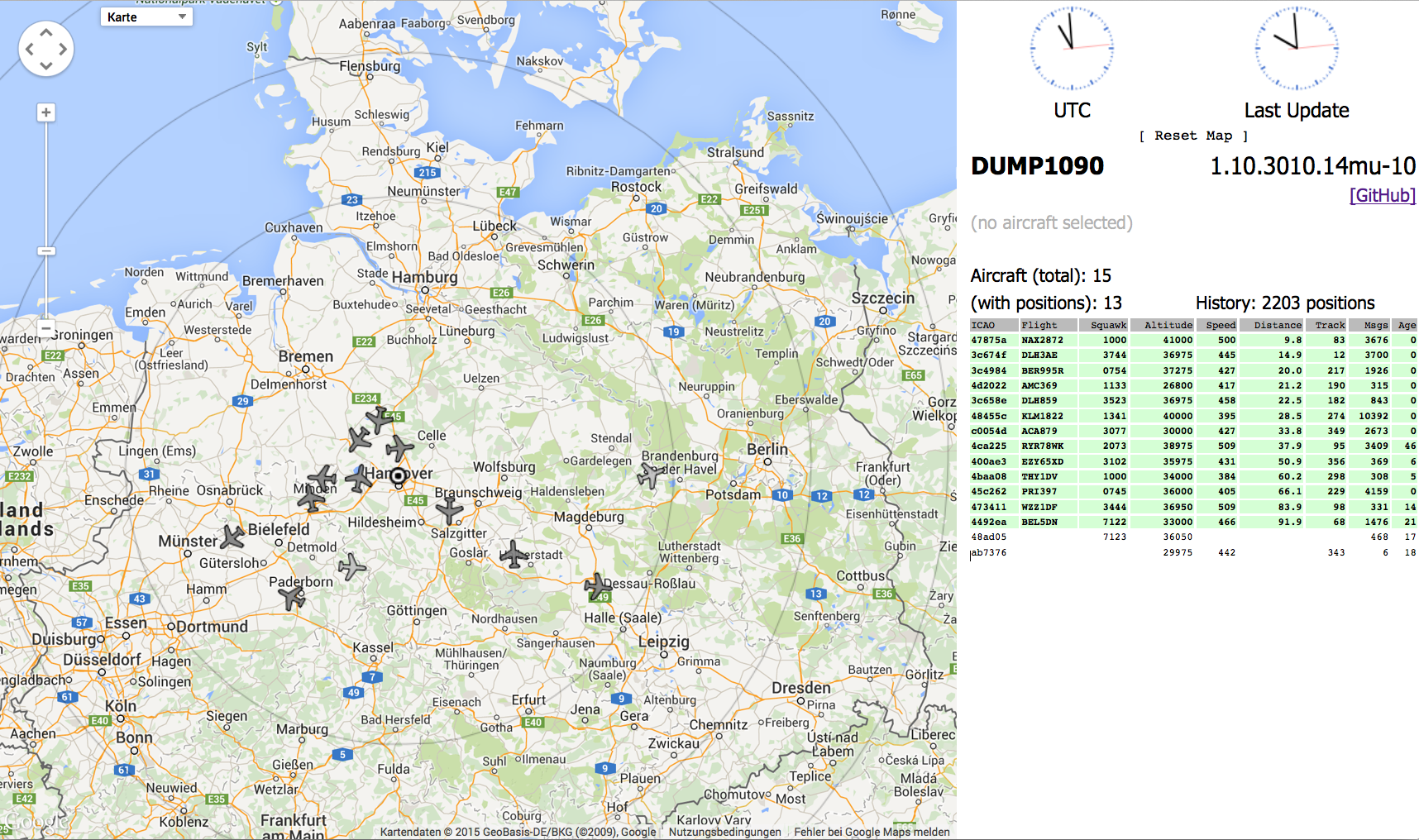
Raspberry Pi: Neue Version dump1090-mutability (1.10.3010.14mu-11) veröffentlicht
Wie hier beschrieben, gibt es einen neuen fork von DUMP1090. Nun ist wieder eine neue Version erschienen (1.10.3010.14mu-11).
Was ist neu?
-Es kann jetzt ein maximaler Bereich angegeben werden mit Parameter –max-range parameter
-Anzeige der Nachrichten Zeit
-Fix bei der UTC Uhr anzeige
-Fix im Info Panel
-Farbe des Flugeuges grau wenn es nicht mehr gesehen wird
-Fix beim beenden über SIGINT
-div. Fix..
Wie kann das update installiert werden?
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 |
# System aktualisieren sudo update sudo upgrade # Version downloaden wget https://github.com/mutability/dump1090/releases/download/v1.10.3010.14mu-11/dump1090-mutability_1.10.3010.14mu-11_armhf.deb # Laufenden Server stopen sudo /etc/init.d/dump1090-mutability stop # Version installieren sudo dpkg -i dump1090-mutability_1.10.3010.14mu-11_armhf.deb # Es erscheint eine Frage nach dem maximalen Bereich in nautische Meilen Eingab z.B. 200 # Checken ob der Server läuft sudo /etc/init.d/dump1090-mutability status # Ausgabe: [ ok ] dump1090-mutability is running. # Archive kann gelöscht werden rm dump1090-mutability_1.10.3010.14mu-11_armhf.deb |
Dann aufrufen der Seite im Browser mit http://rpi-adresse:port
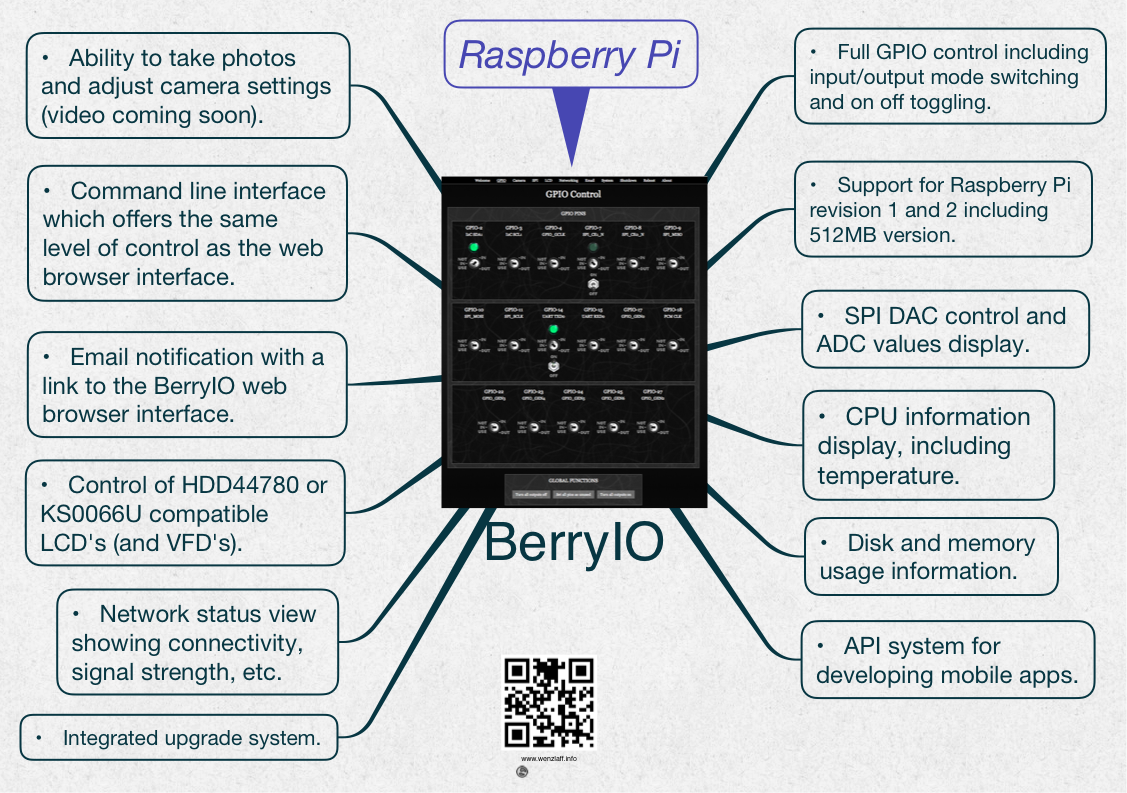
Raspberry Pi: Einfaches steuern der Ports, Kamera, System usw. über Browser mit BerryIO V. 1.12.0
Einfaches steuern der IO Ports, Kamera, LCD, SPI, Network, Systemstatus usw. des rPi geht mit BerryIO, das in ein paar Minuten installiert ist.
Zuerst einmal ein kleiner Überblick als Mindmap:
Und nun die Installation:
|
1 2 3 4 5 6 7 8 9 10 11 |
# System aktualisieren sudo apt-get update sudo apt-get upgrade # Download der aktuellen Version wget -N https://raw.github.com/NeonHorizon/berryio/master/scripts/berryio_install.sh # Script ausführbar machen chmod +x berryio_install.sh # Installation starten sudo ./berryio_install.sh # Programm Hilfe aufrufen berryio help |
Ausabe der Hilfe:
|
1 2 3 4 |
BerryIO V1.12.0 (2014-08-02) USAGE: sudo berryio <command> [<option>] [<option>] [....] |
Es gibt auch eine Kommandozeilen API. Cool mit der Api, man kann auch alles über das Terminal abfragen und evl. scripten. Da kommt mir doch gleich eine Idee zum Fhem Server.
Aber die Gui ist auch schön.
Aufruf im Browser: http://pi-adresse dann eingabe des Users: pi und Passwort.
Schon erscheint der Dialog:
Über das Menü können leicht die anderen Reiter angezeigt werden. Hier mal eine kleine Auswahl: „Raspberry Pi: Einfaches steuern der Ports, Kamera, System usw. über Browser mit BerryIO V. 1.12.0“ weiterlesen
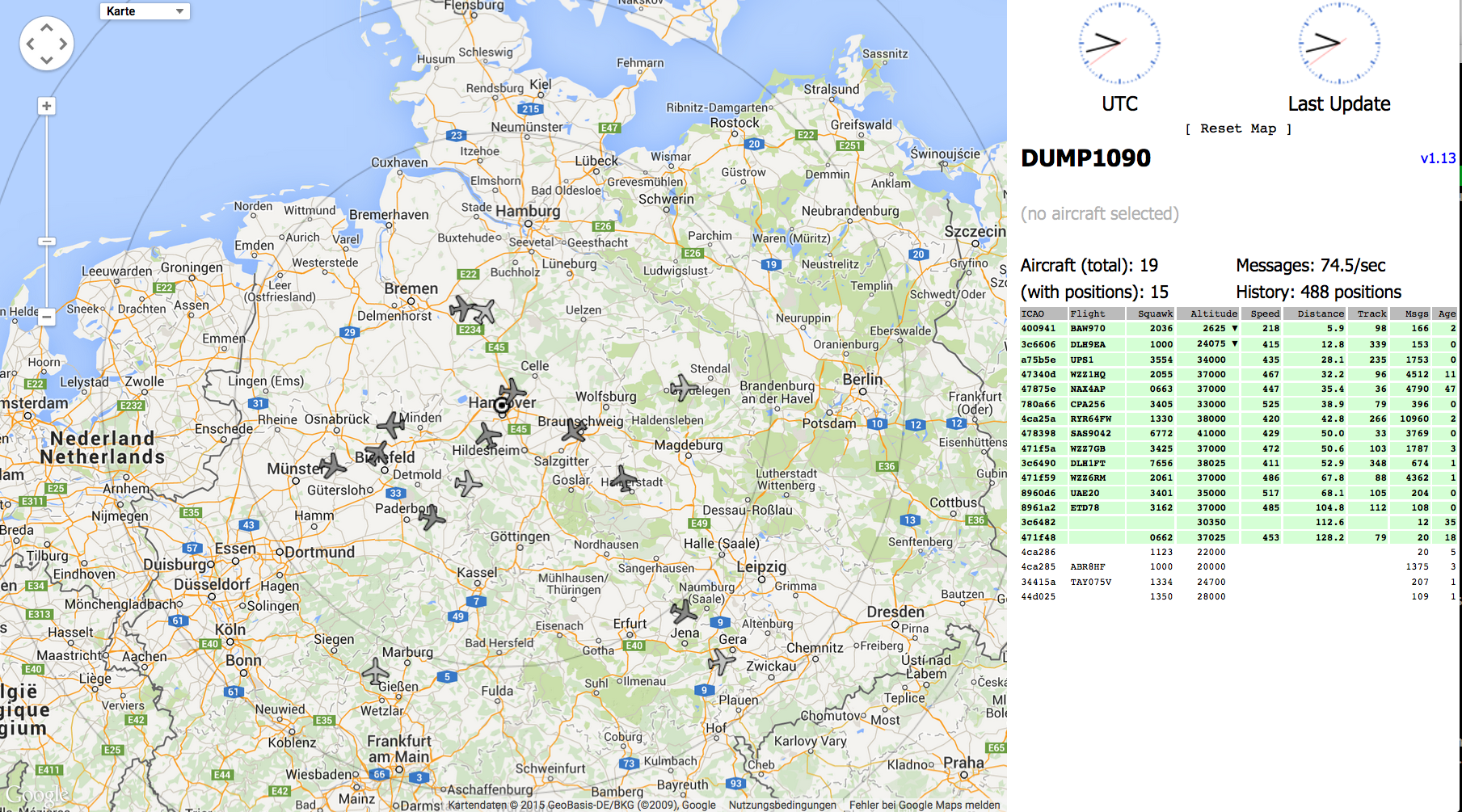
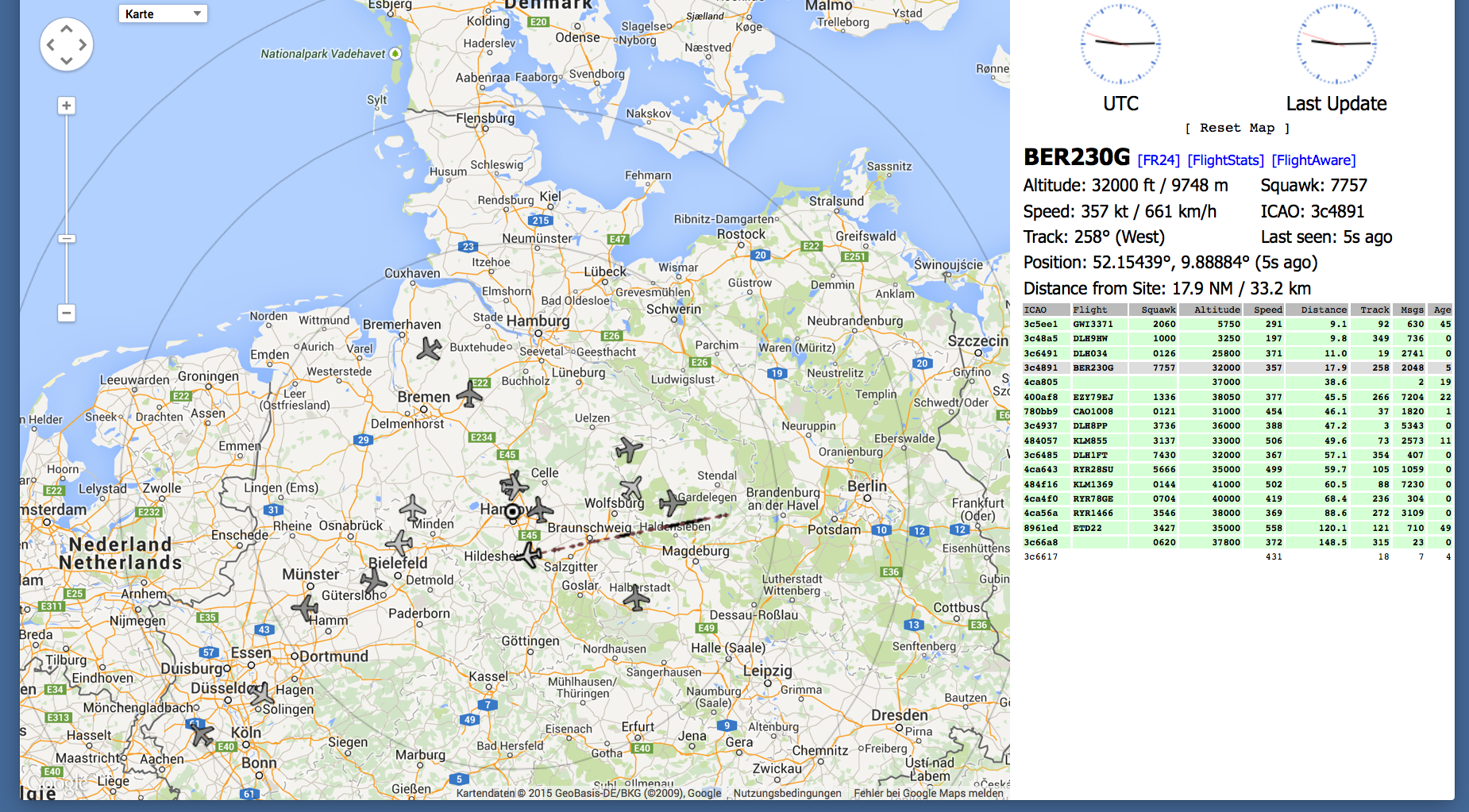
Raspberry Pi: Wie kann ein neuer Mode S Decoder für RTLSDR Devices (DUMP1090 fork) dump1090-mutability installiert werden?
Der DUMP1090 Server läuft bei mir schon lange auf einem eigenen Raspberry Pi B+ ganz gut. Es gibt nun einen neuen fork von Oliver Jowett (thanks), der einige Neuerungen bzw. Erweiterungen hat. Der dump1090-mutability.
Der mutability fork braucht nicht als root laufen und enthält die FlightAware (faupt1090) Verbindung. Auch läßt er sich besser konfigurieren auch mit externen Server. Es gibt auch eine schönere GUI, mit Kreisen rund um den Standort und bessere Daten. So werden jetzt alle Flugzeuge in Summe angezeigt und auch mit Postitionsdaten. Also einige Gründe, mal umzuschwenken.
Hier mal ein Foto um Geschmack zu machen mit der Summe der Flugzeuge:
Und hier ein Foto, wenn ein Flugzeug selektiert ist mit Details:
 „Raspberry Pi: Wie kann ein neuer Mode S Decoder für RTLSDR Devices (DUMP1090 fork) dump1090-mutability installiert werden?“ weiterlesen
„Raspberry Pi: Wie kann ein neuer Mode S Decoder für RTLSDR Devices (DUMP1090 fork) dump1090-mutability installiert werden?“ weiterlesen
Raspberry Pi: QR-Codes mit qrencode generieren
Vor einem Jahr hatte ich schon mal über QR-Codes geschrieben, wie Quick Response online erzeugt werden können.
Jetzt wolle ich mal QR-Codes mit dem Raspberry Pi selbst erstellen. Das geht auch sehr einfach. Wie?
Erste das System auf den aktuellen Stand bringen und dann das qrencode Package installieren:
|
1 2 3 4 |
sudo apt-get update sudo apt-get upgrade # installieren von qrencode sudo apt-get install qrencode |
Eine Mindmap der installierten Abhängikeiten:
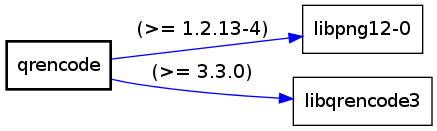
Nun ist die Version 3.3 installiert. Wer die neuere 3.4.4 braucht, muss sie halt selbst compilieren (wget, ./configure, make, make install)
So nun wollen wir gleich mal ein paar QR-Cods generieren. Zuerst einen mit einer URL
|
1 |
qrencode -l H -o qr-www.wenzlaff.info.png 'http://www.wenzlaff.info' |
dabei ist der Parameter -l der Korrekturlevel ( L ~7%, M ~15%, Q ~25%, H ~30% ) und ein QR-Code mit einem Text: „Raspberry Pi: QR-Codes mit qrencode generieren“ weiterlesen
R.I.P.: Karotz lebt wieder (ἀνάστασις) mit OpenKarotz via Fhem auf dem Raspberry Pi
Leider ist Karotz schon jetzt gestorben.
Mit OpenKarotz lebe er nun wieder. Danke. Echt cool das Projekt. Die Anleitung ist auch super. Man braucht nur
1. den Karotz reseten
2. die neue Firmware 2.0 flashen
3. das update auf 2.1 machen und den Patch 222 einspielen
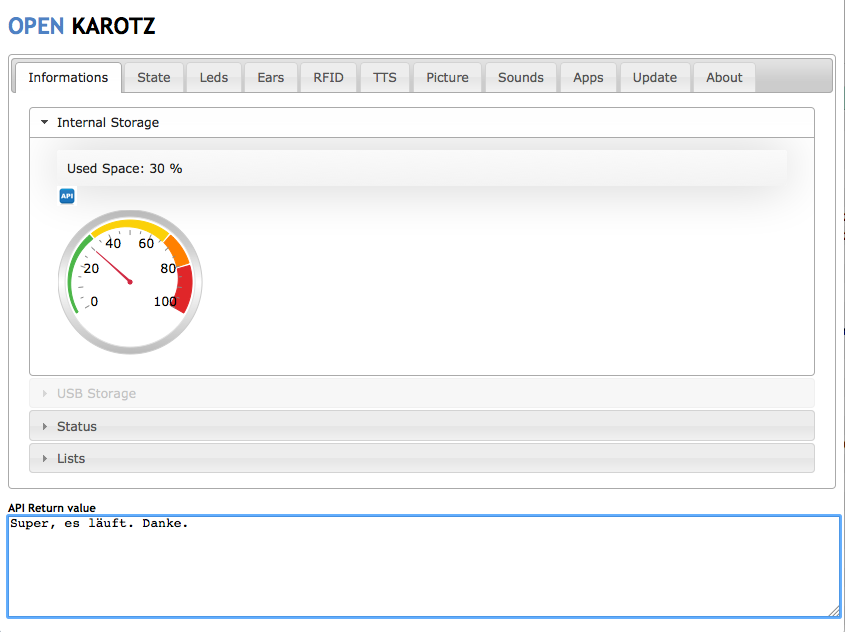
schon hat man einen über einen WEB-Browser (URL = Karotz-IP) erreichbaren Karotz. Das ist alles schön mit Fotos auf der Homepage von OpenKarotz beschrieben. Auf deutsch oder englisch kann man die Google Übersetzung unten rechts auf der Seite aktivieren.

Bei klick auf das Logo, erscheint:
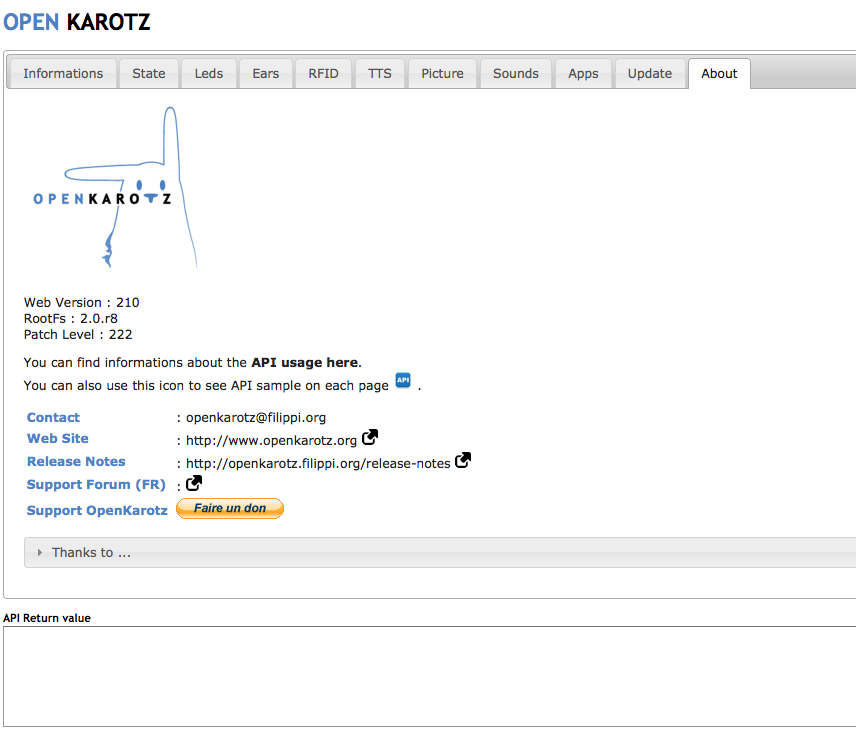
Der About Reiter zeigt die aktuellen Versionen an:
Auch über Telnet kann man den Karotz erreichen mit login: openkarotz
|
1 |
telnet Karotz-ip |
Auch die Integration über den Homeserver Fhem, der auf einem Raspberry Pi läuft, klappt auf Anhieb. Hier gibt es eine Anleitung dazu. Einfach in der /opt/fhem/FHEM/99_myUtils.pm die folgende Methode einfügen:
|
1 2 3 4 5 6 |
sub karotz(@) { my ($ip,$cmd) = @_; my $url = "http://"."$ip"."/cgi-bin/".$cmd; my $ret = GetFileFromURL($url,3,undef,1,1); return $ret; } |
oder wenn man einen nicht blockenden Aufruf für Fhem haben möchte, oben in der Perl Datei
|
1 |
use HttpUtils; |
und dann diese Methode:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 |
sub karotzBefehl(@) { my ($ip,$cmd) = @_; my $url = "http://"."$ip"."/cgi-bin/".$cmd; my $hash = { url => $url, callback=>sub($$$){ Log 1,"karotz: $url\nERR:$_[1] DATA:$_[2]" }, }; my ($err, $ret) = HttpUtils_NonblockingGet($hash); if($err) { Log3 undef, $hash->{loglevel}, "karotz: $err"; return undef; } return $ret; } |
Der Aufruf kann dann für eine Ansage oder einer Ohr-Bewegung dann in der *.cfg Datei mit:
|
1 2 |
karotzBefehl("Karotz-IP", "tts?voice=julia&text=Telefonanruf.$name&nocache=0");;\ karotzBefehl("Karotz-IP", "ears_random");;\ |
Dann kann in der fhem.cfg ein Eintrag in der Art:
|
1 2 3 |
karotz(<IP-Karoz>,"ears_random");;\ # oder nicht blockend karotzBefehl("Karotz-IP", "ears_random");;\ |
gemacht werden und schon wackelt er mit den Ohren dank OpenKarotz.
Habt Ihr noch gute Seiten zu dem Thema gefunden oder Ideen und Tips?
Kleinhirn.eu: Neuen Blog „TOP 3 Fotos“ erstellt
Diese neue Blog Adresse merken (http://top-drei-fotos.kleinhirn.eu/) oder gleich bookmarken, um jeweils die TOP 3 Fotos aus einem Bereich zu sehen. Den Anfang macht „Vietnam Park“. Die Kategorie „Raspberry Pi“ kommt auch noch 😉
php Sicherheitsupdate für Raspberry Pi veröffentlicht (CVE-2014-8142, Debian, 5.4.36-0+deb7u1)
Für die aktuelle php5 Version gibt es ein Sicherheitsupdate.
Bei diesen Abhängikeiten (siehe Mindmap) kein Wunder:
Also wie gewohnt ein:
|
1 2 |
sudo update sudo upgrade |
und checken ob die neue Version vorhanden ist:
|
1 |
apt-show-versions php5 |
Es muss die Version: php5/wheezy uptodate 5.4.36-0+deb7u1 ausgegeben werden.
Wenn nicht, siehe hier.
Raspberry Pi: Wie wird die neue Version PiAware 1.19-3 installiert?
Heute ist die neue Version PiAware 1.19.-3 erschienen.
Was gibt es neu:
- mit allen aktuellen ADS-B Nachrichten
- neue kompressions Technik zum reduzieren der Bandbreite
- trennen vom Server bei vielen Server Nachrichten
- Versions Nummer anzeigen mit piaware -v
- entfernte Abhängigkeiten
Wir wird die neue Version nun installiert bzw. upgegradet?
Zuerste den (optional) den laufenden piaware Prozess stoppen mit:
|
1 |
sudo /etc/init.d/piaware stop |

Dann die aktuelle Version downloaden mit:
|
1 |
wget http://flightaware.com/adsb/piaware/files/piaware_1.19-3_armhf.deb |
Den update bzw. die Neuinstallation ausführen mit:
|
1 |
sudo dpkg -i piaware_1.19-3_armhf.deb |

Optional bei Neuinstallation:
|
1 |
sudo apt-get install -fy |
Nun den Server neu starten bzw. restarten mit:
|
1 |
sudo /etc/init.d/piaware restart |
Woran kann man nun erkennen das alles wieder läuft? Auf der User-Seite ist nun die folgende Warnung entfernt:

Und nach ein paar Minuten gibt es die Info:

Und natürliche werden auch die Fluginformationen aktualisiert, ok 723 Flugzeuge für den letzten Tag im Jahr ist nicht viel aber es sind ja auch noch ein paar Stunden bis 2015:

Es kann aber auch die Version angezeigt werden mit dem neuen Feature:
|
1 |
piaware -v |
Ausgabe wenn das update geklappt hat: 1.19-3
Gut Flug …