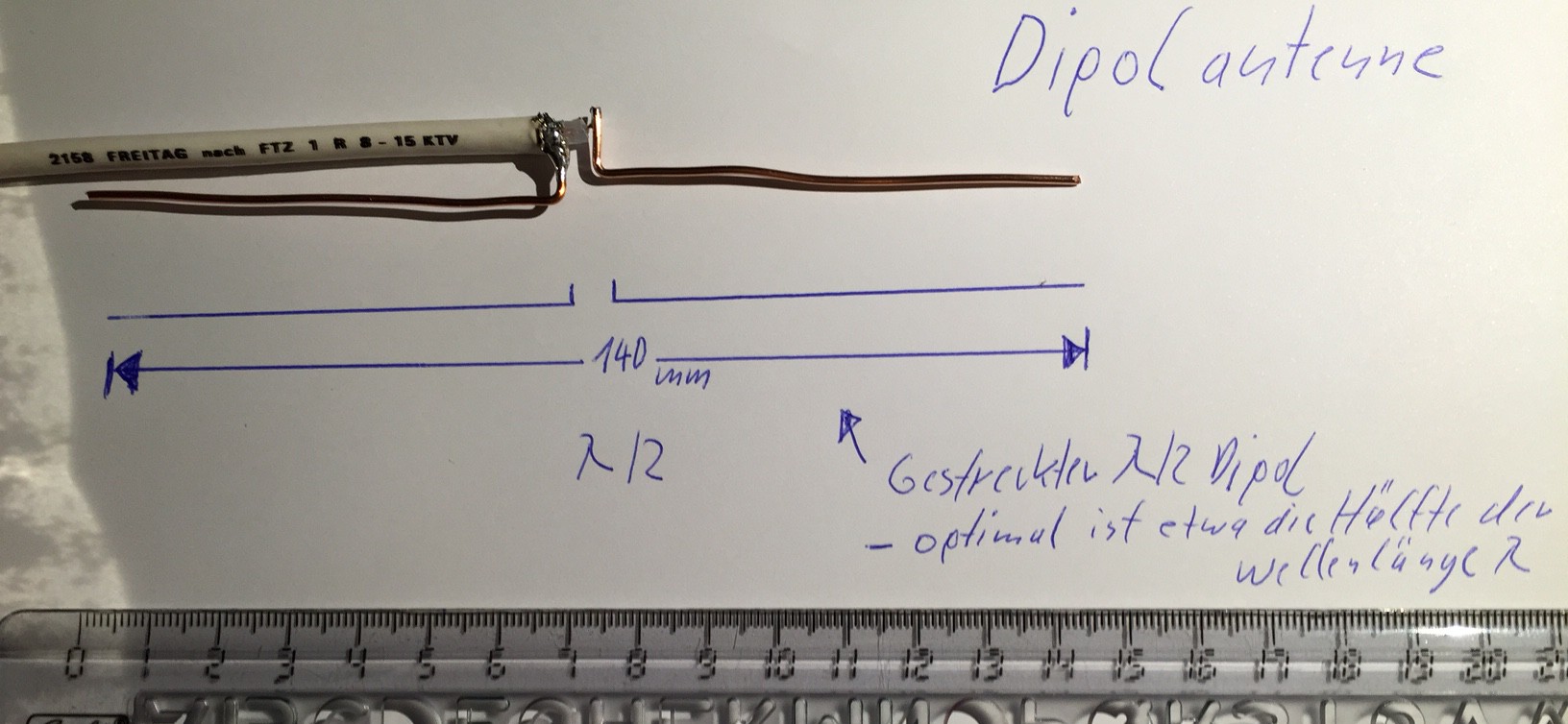
Heute am Basteltag wollte ich mal sehen, was so erreicht werden kann mit einer anderen Antenne und einer optimalen Antennen Position. Also mal einen Dipol für 1090 Mhz berechnet und gebaut. Ok, hier die 1. Version:
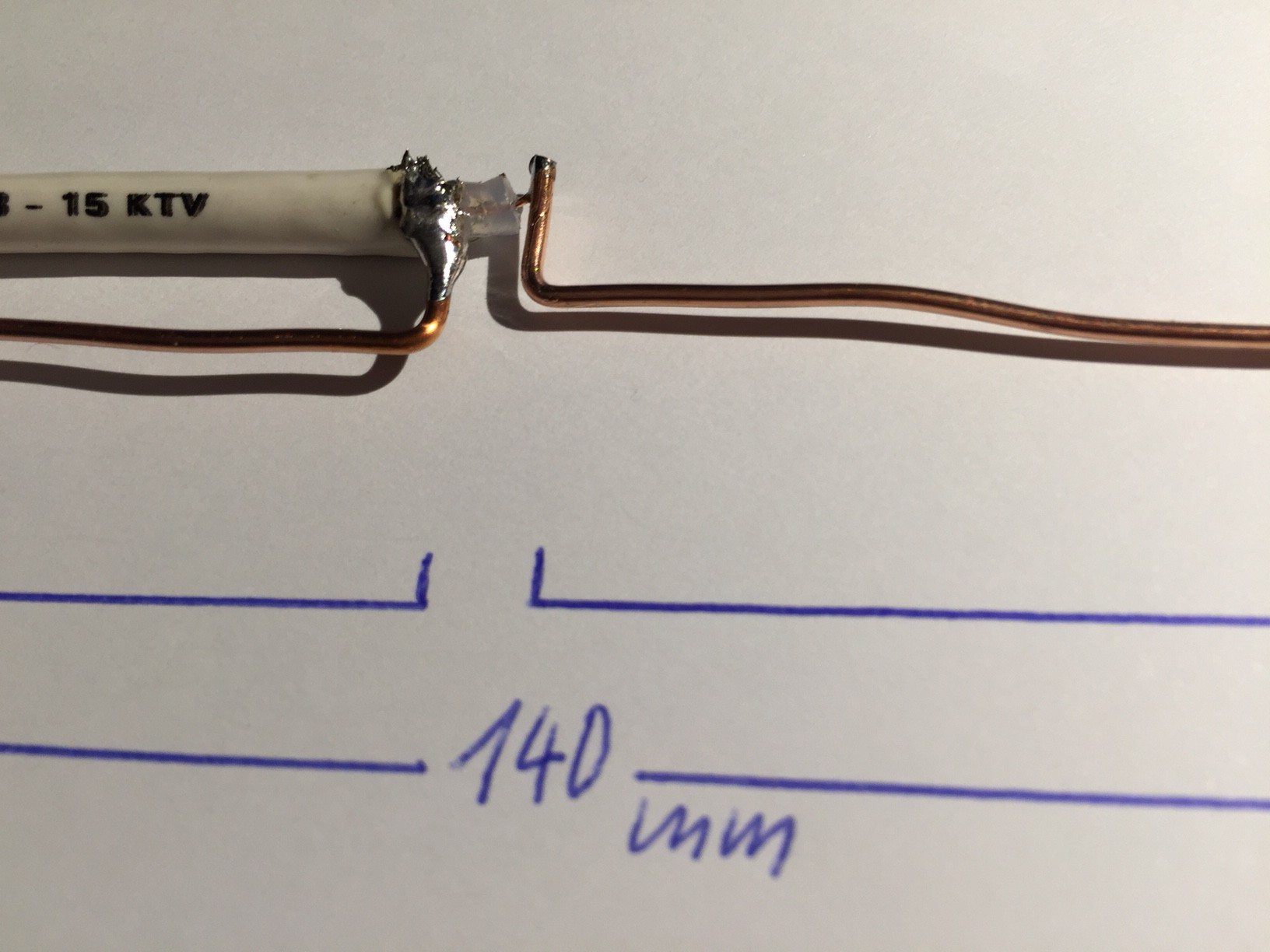
Und eine Nahaufnahme. Ok, das geht auch schöner:
Und auf der anderen Seite des Koaxkabel ein Stecker mit Adapter:
So nun beide montieren:

Und das ganze in einen vorhandenen Kabelkanal mit etwas Klebeband fixiert:

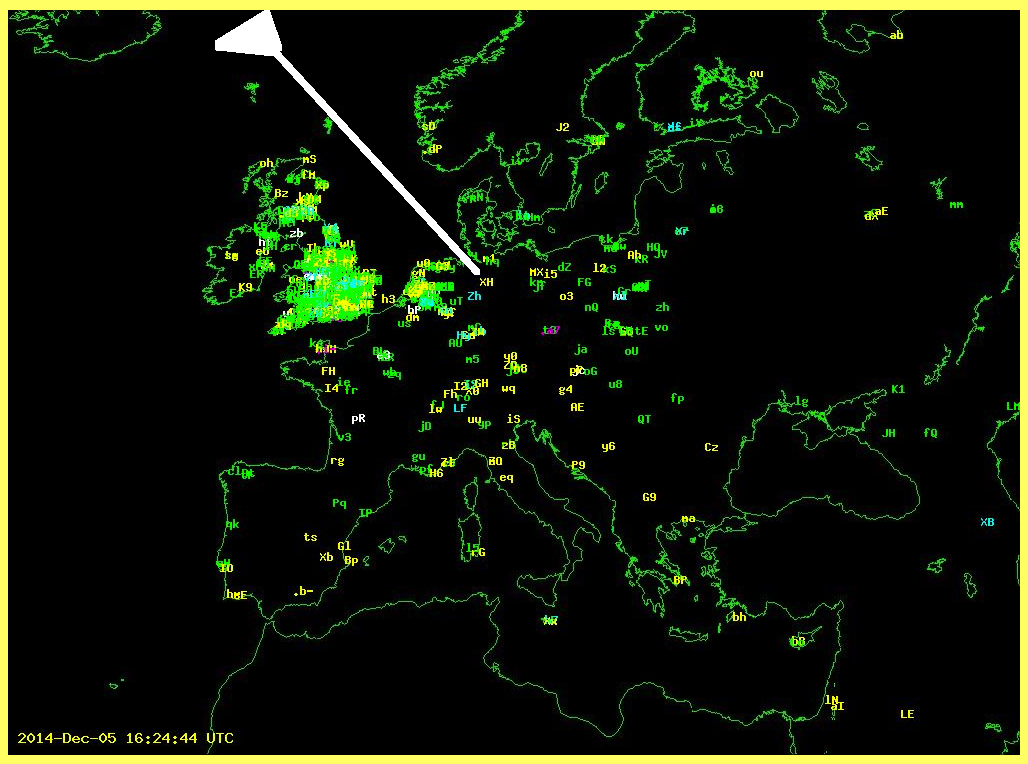
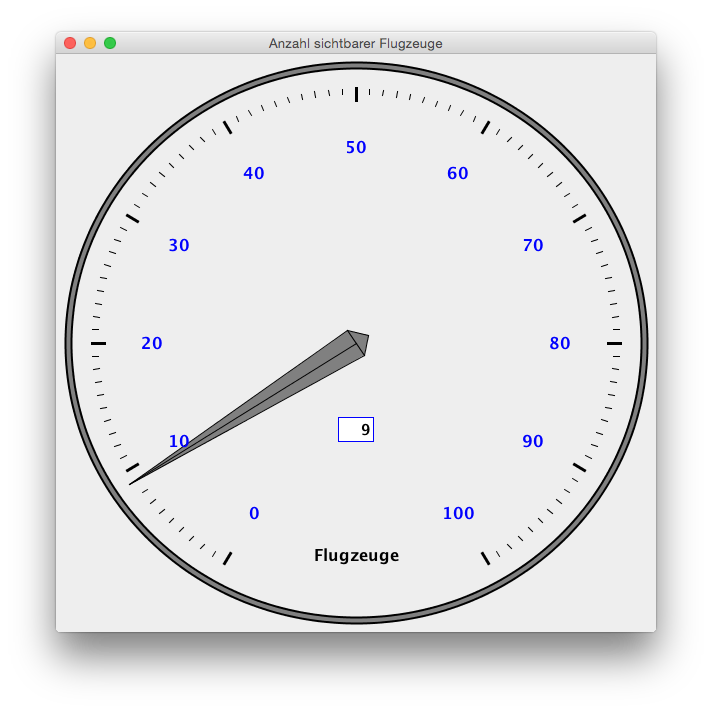
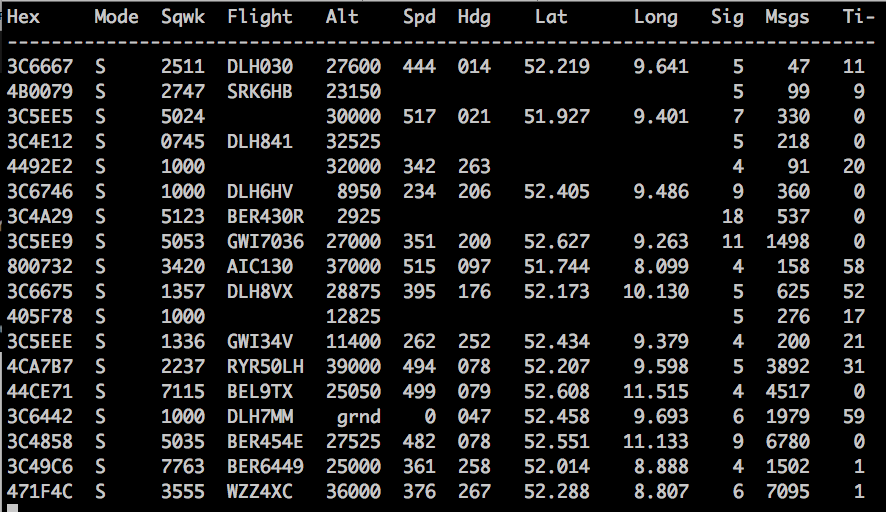
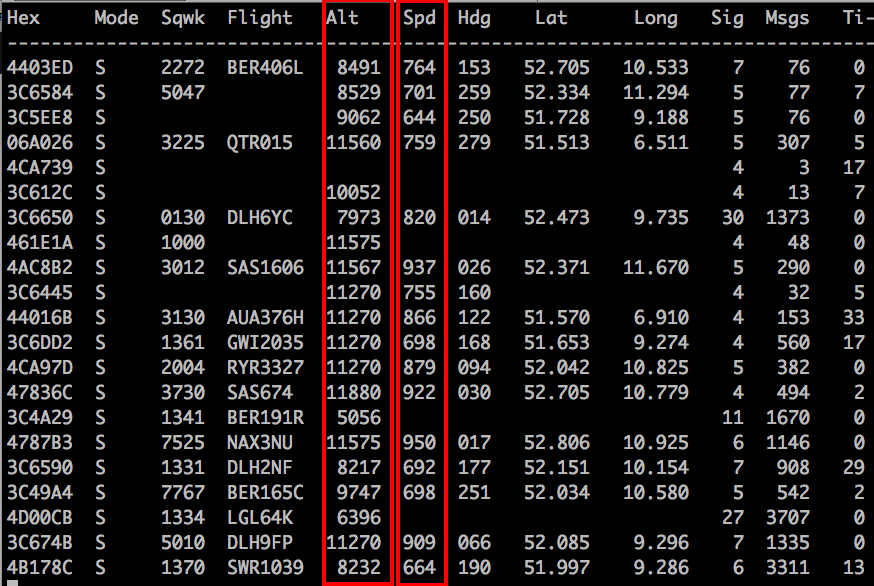
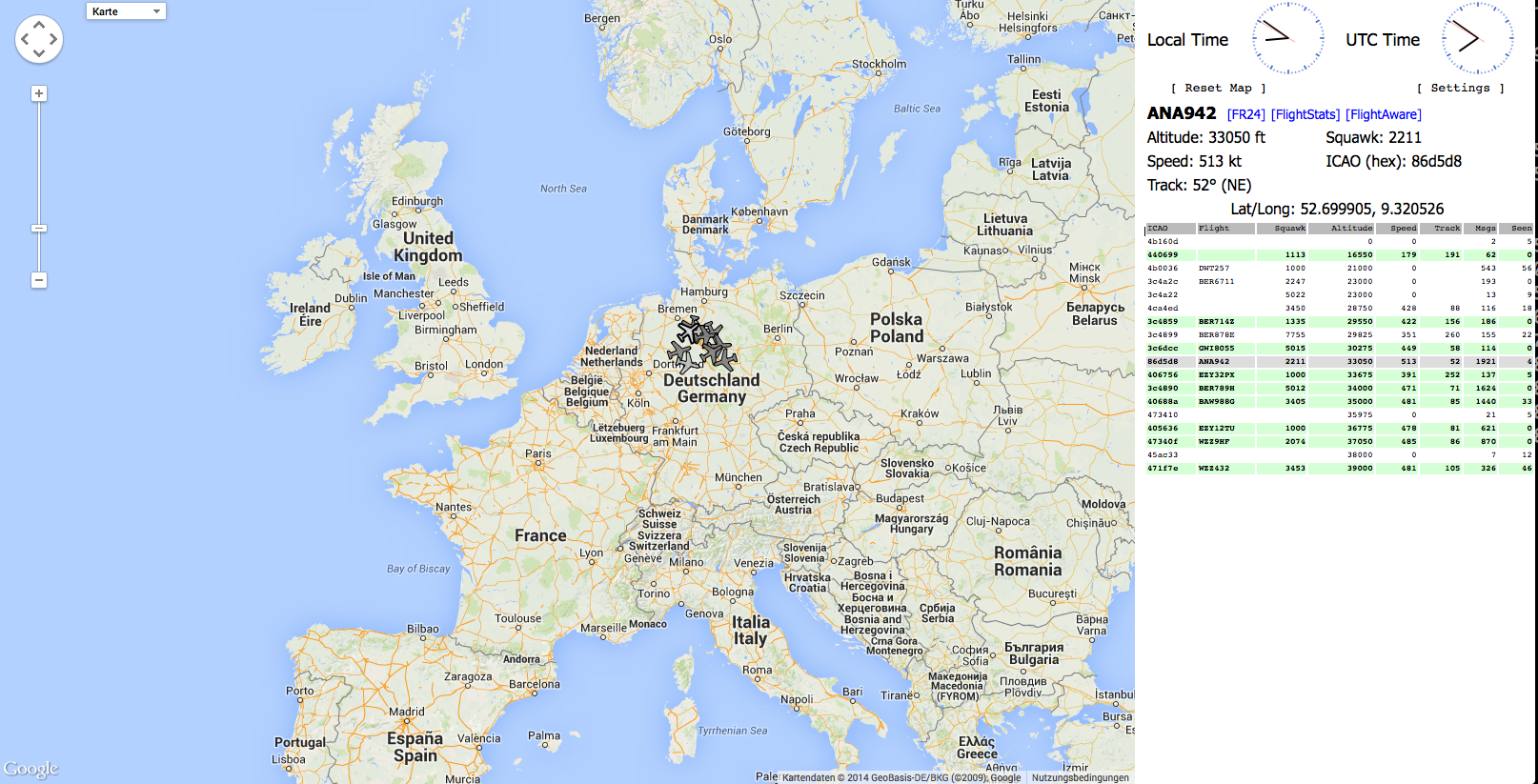
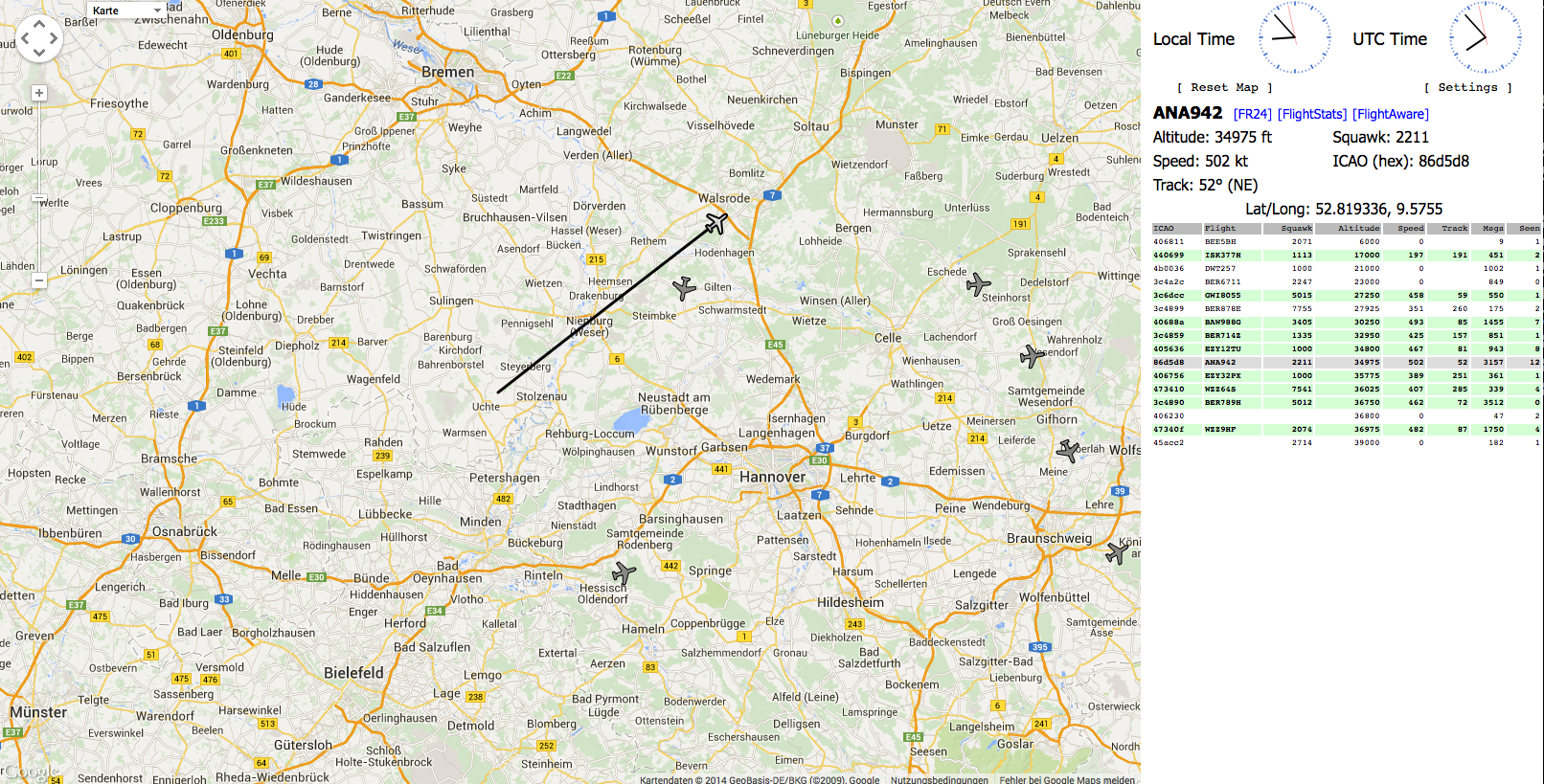
Nun das ganze in der 3. Etage mit frei Sicht in alle Richtungen auf dem Dach versuchsweise mit Klebeband montiert. Auf Anhieb konnte ich doppelt soviele Flugzeuge empfangen wie mit der Zimmerantenne. Und das bei „blue sky“.

Das Antennen Kabel geht leider nur nach draußen, wenn das Fenster auf ist.

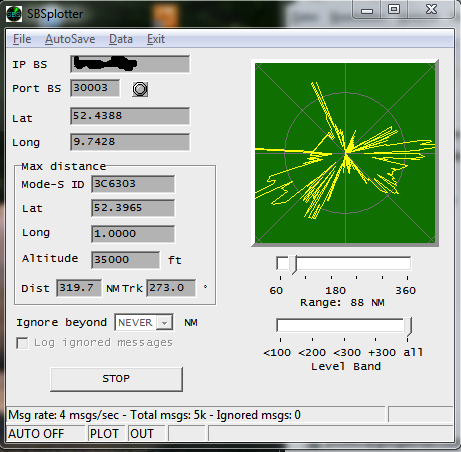
Auch geht es nun in alle Richtungen.

Es ist schon cool, mit einen kleinen Dipol von Langenhagen bis nach Hamburg, Cuxhaven, Bremen, Münster, Düsseldorf, Aachen (fast in Belgien), Bonn, Kassel, Wolfsburg. Nach einer halben Stunde musste ich diesen Versuchsaufbau abbrechen, wegen Regen. Aber immerhin 54 gleichzeitige Flugkontakte auf Anhieb mit den selbstgebauten Dipol mit Verbesserungspotential. Der Dipol muss natürlich senkrecht angebracht werden.
Berechnung des Dipols:
Lichtgeschwindigkeit = 300 000 000 m/s
Ziel Frequenz= 1090 Mhz gleich 1090 000 000 Hertz
Wellenlänge = 300 000 000 / 1090 000 000 = 0,275 m = 275 mm.
Das ganze durch 2 teilen, da ich einen Dipol haben möchte. 275 mm/2 = 137 mm
Also die Gesammtlänge der Antenne muss ca. 140 mm sein.
Oder habe ich mich verrechnet? Gehts noch einfacher? Und wie sieht es mit Blitzableiter aus?